
计算机视觉基础 相机模型
文章目录相机模型世界坐标系到摄像机坐标系摄像机坐标系到图像物理坐标系图像物理坐标系到图像像素坐标系摄像机坐标系到图像像素坐标系世界坐标系到图像像素坐标系相机成像原理镜头畸变透视变换定义代码展示应用相机模型相机与图像之间的关系相机成像的大致流程世界坐标系到摄像机坐标系摄像机坐标系到图像物理坐标系主要是根据相似三角形列出等式。图像物理坐标系到图像像素坐标系摄像机坐标系到图像像素坐标系世界坐标系到图像像
·
文章目录
相机模型
相机与图像之间的关系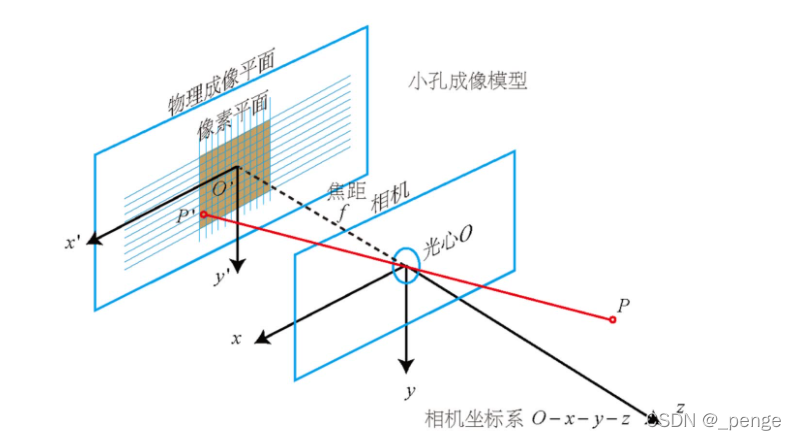
相机成像的大致流程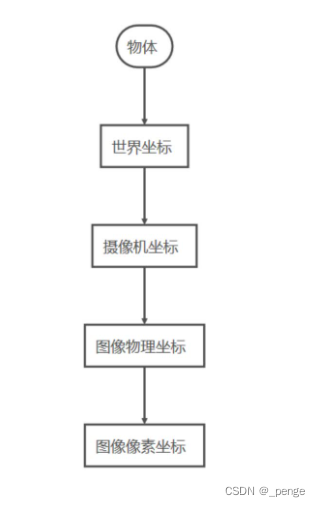
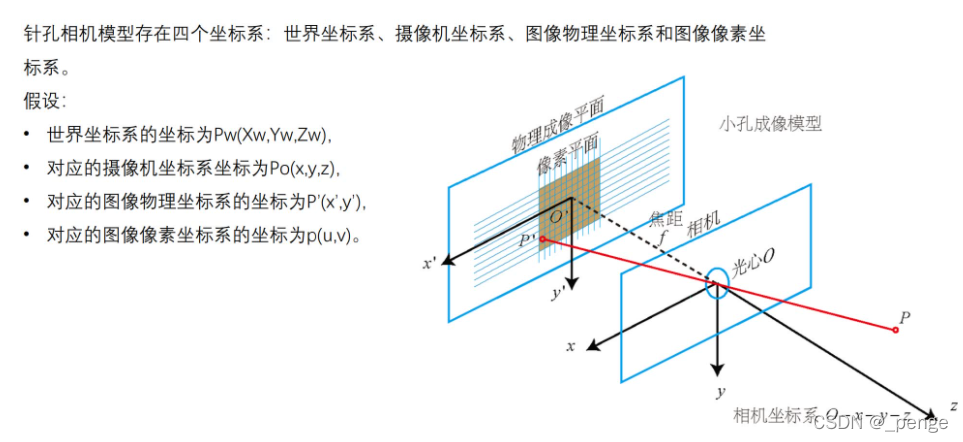
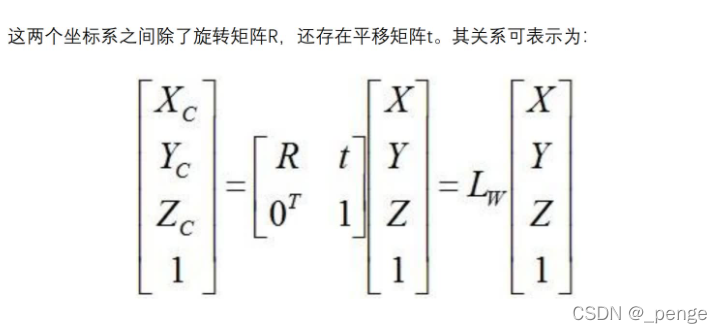
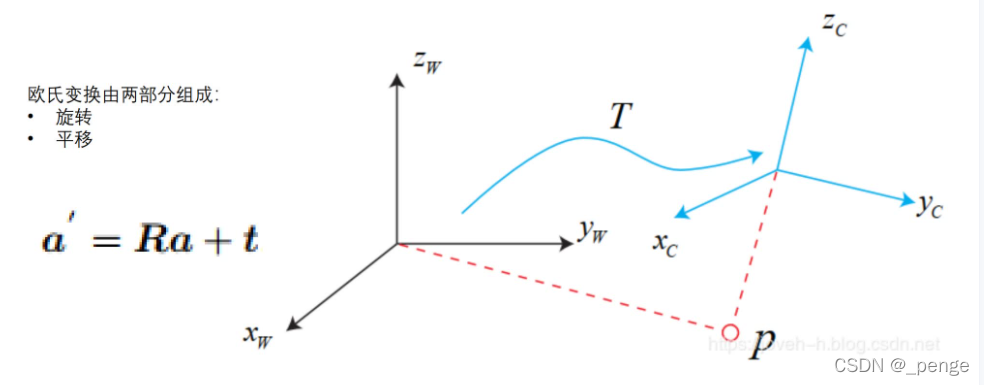
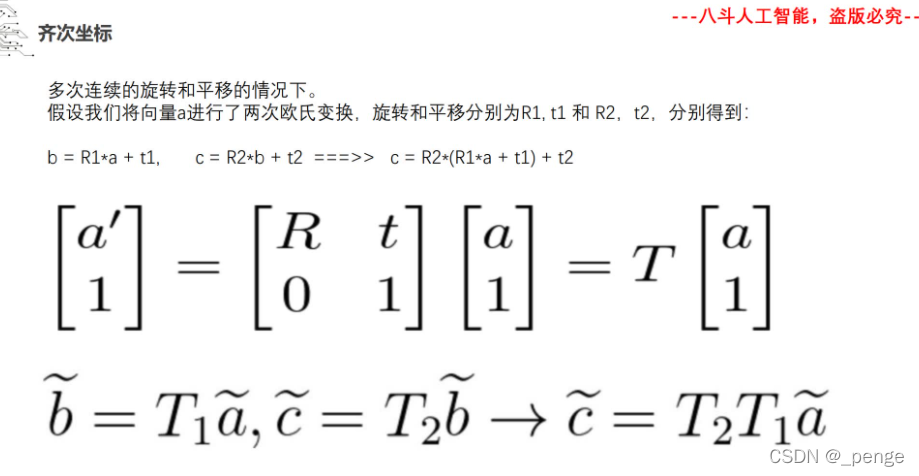
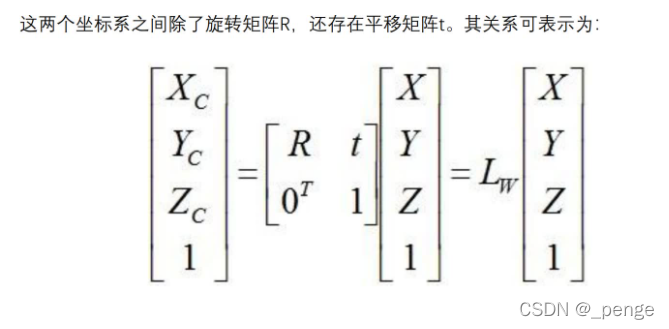
世界坐标系到摄像机坐标系
摄像机坐标系到图像物理坐标系
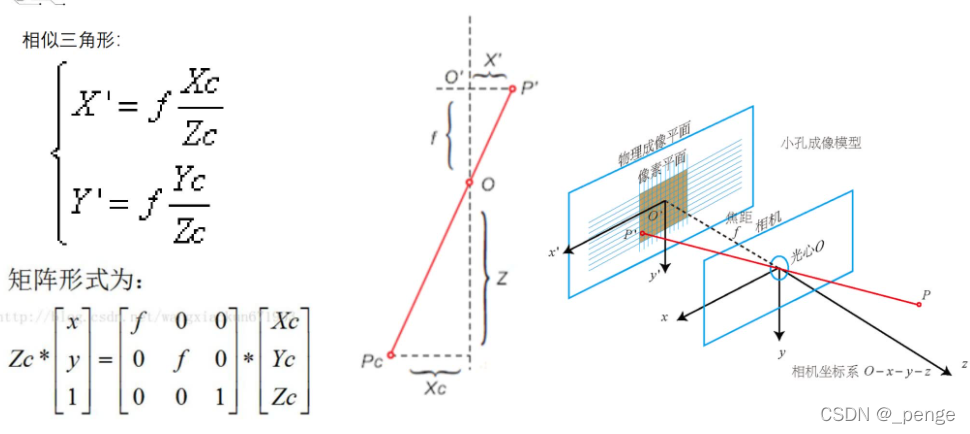
主要是根据相似三角形列出等式。
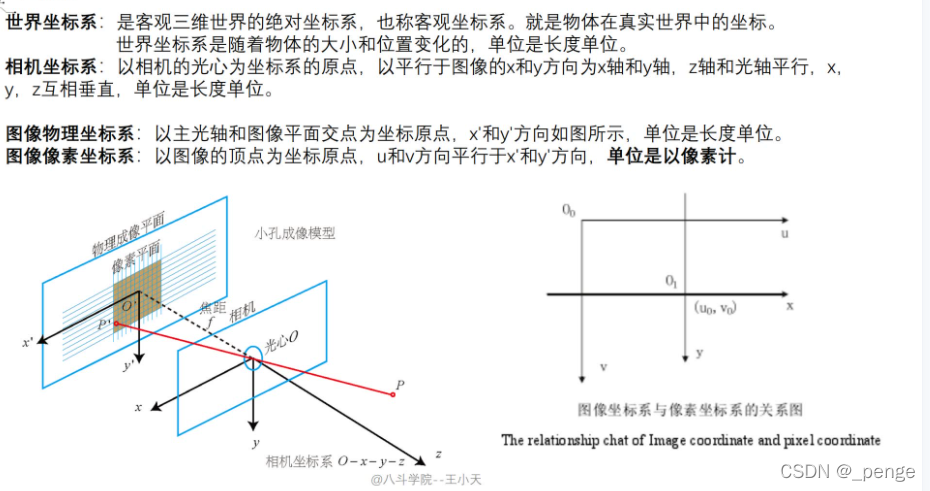
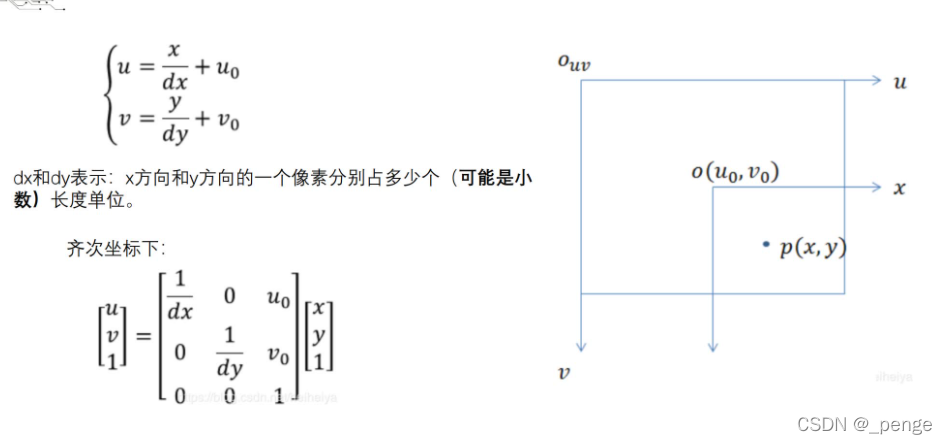
图像物理坐标系到图像像素坐标系
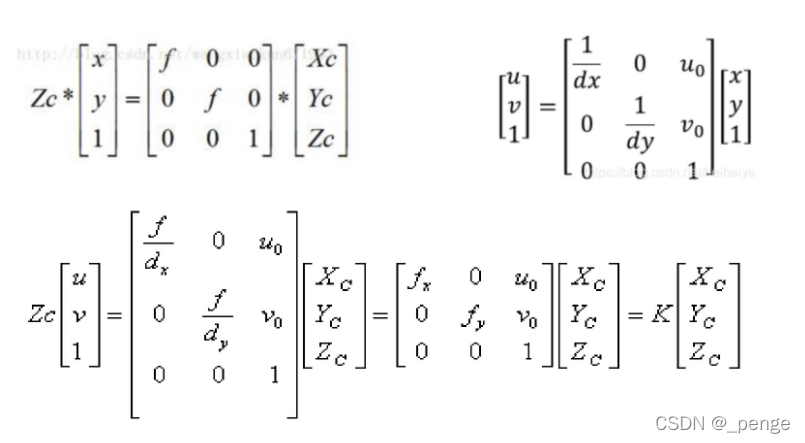
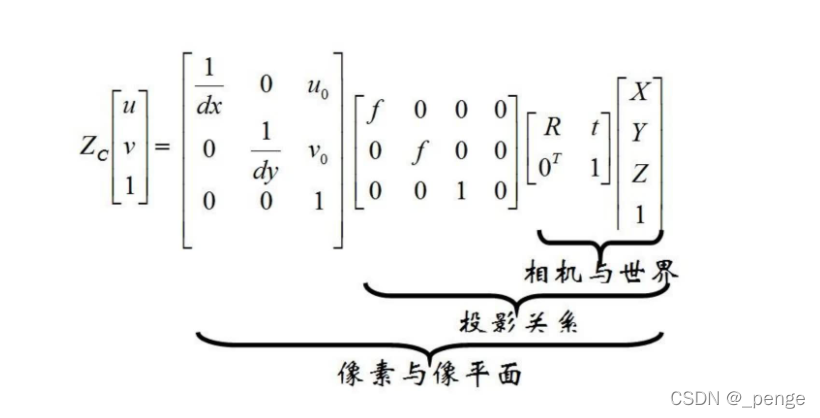
摄像机坐标系到图像像素坐标系
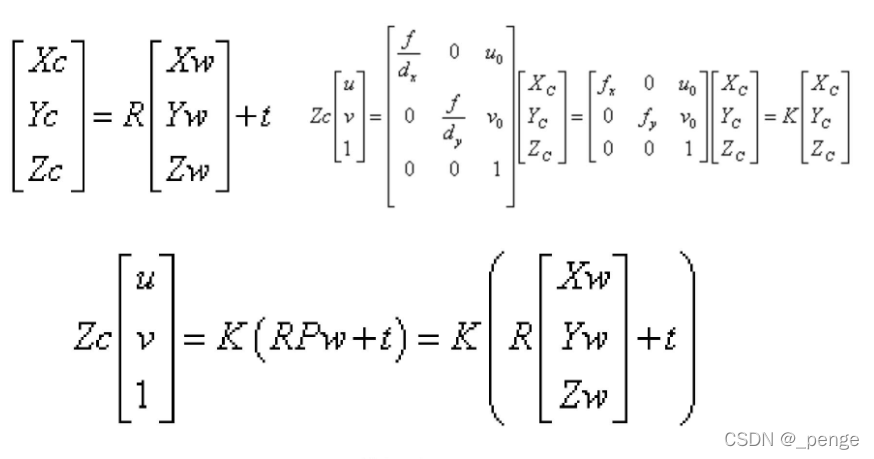
世界坐标系到图像像素坐标系
相机成像原理
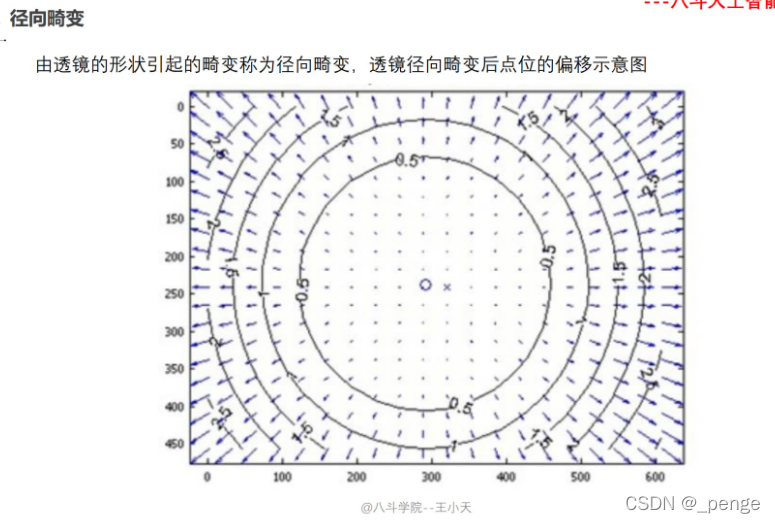
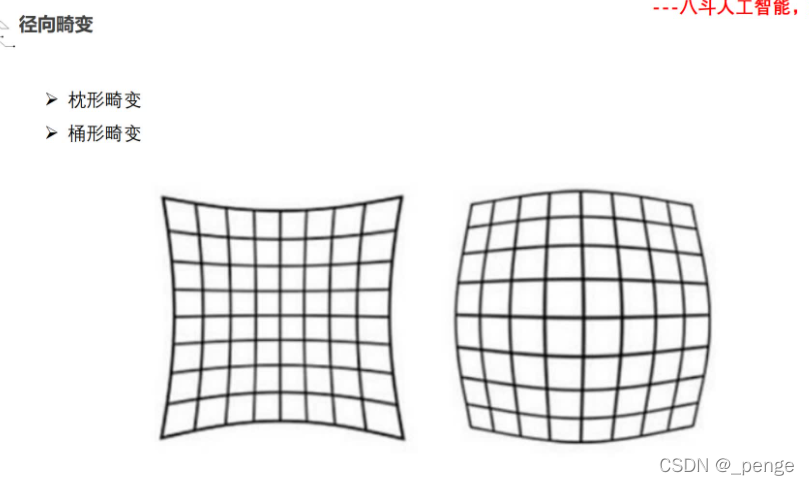
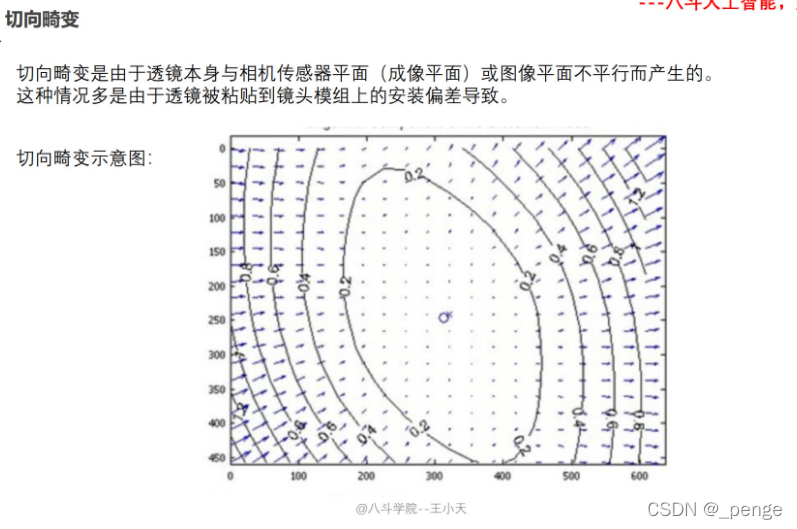
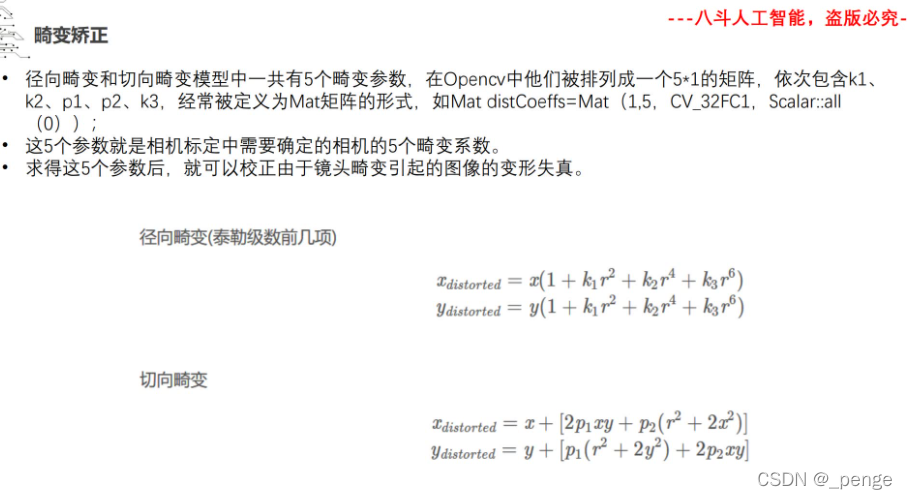
镜头畸变
(简单了解)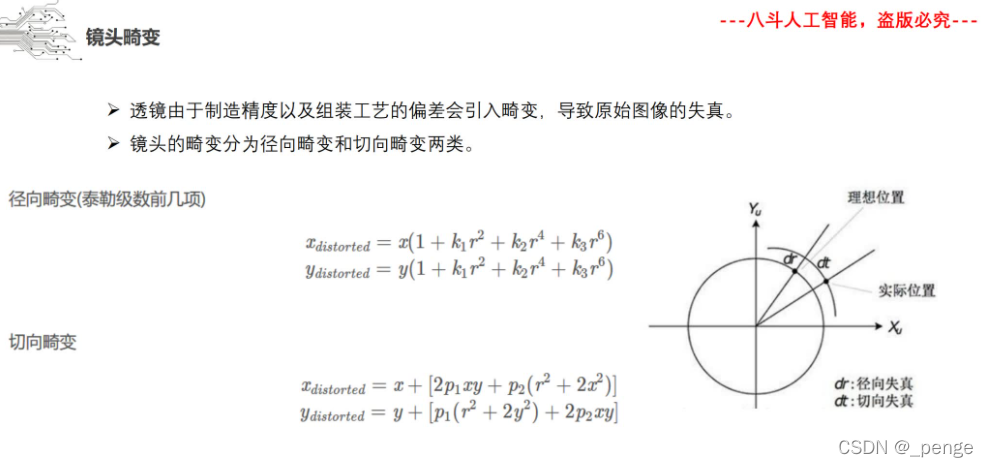
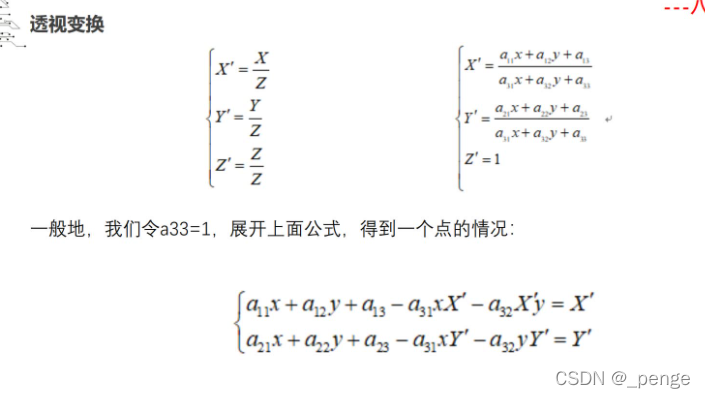
透视变换
定义
透视变换(Perspective Transformation)是将图片投影到一个新的视平面(Viewing Plane),也称作投影映射(Projective Mapping)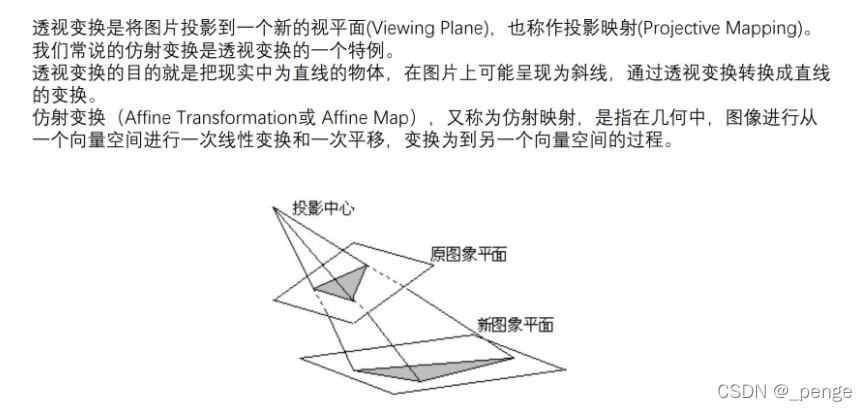
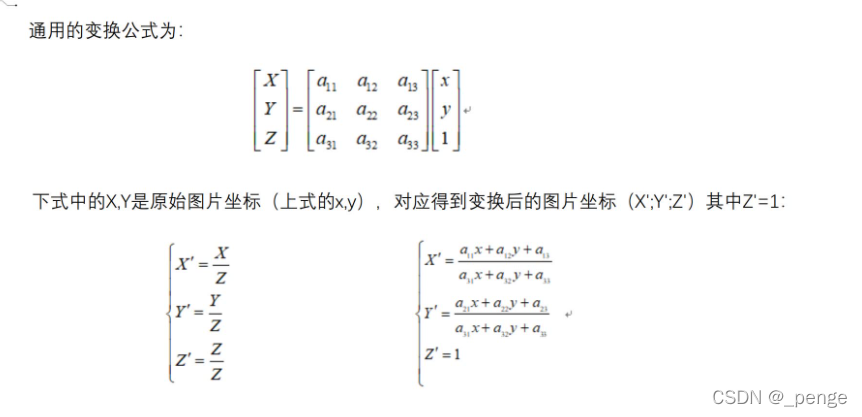
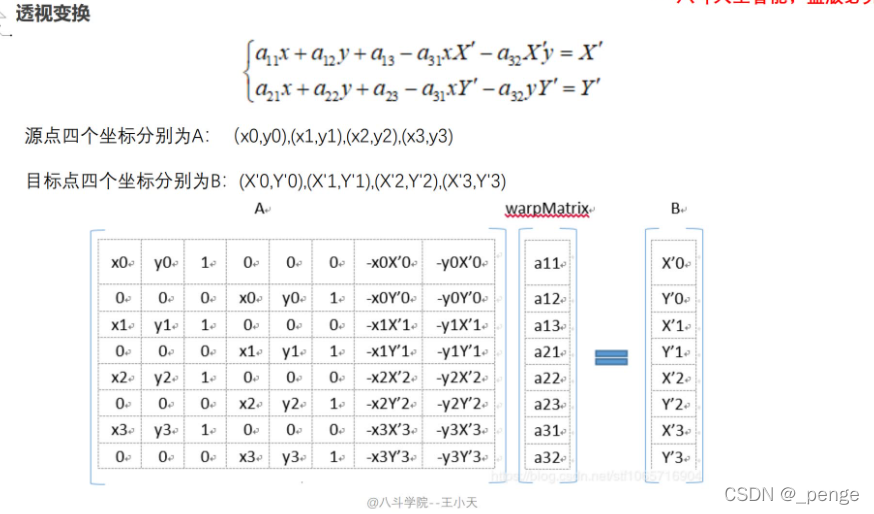
解释:我们的目标是要求出warpMatrix矩阵,所以要找到现图像和将要变化的图像的顶点坐标。因为有8个未知数(3X3的矩阵总共9个参数,我们将A33置为1),所以要找到原坐标和现坐标各4对。带入便可求出warpMatrix矩阵
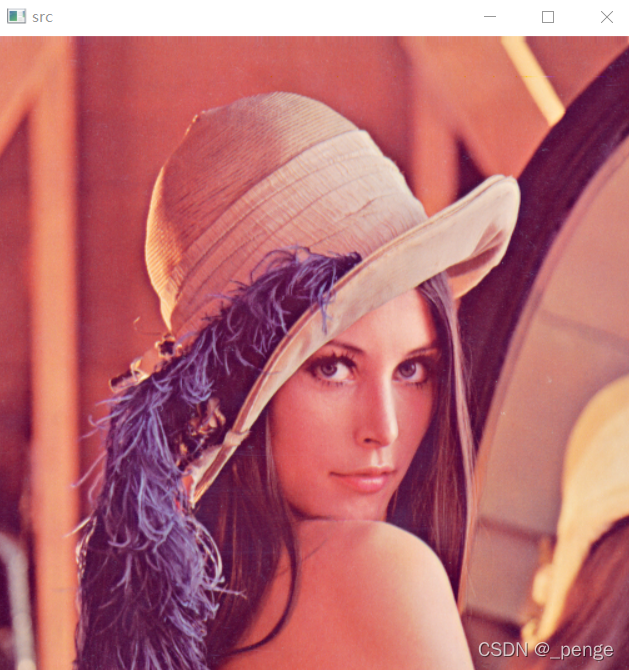
代码展示
import cv2
import numpy as np
img = cv2.imread('lenna.png')
result3 = img.copy()
'''
注意这里src和dst的输入并不是图像,而是图像对应的顶点坐标。
'''
src = np.float32([[207, 151], [517, 285], [17, 601], [343, 731]])
dst = np.float32([[0, 0], [300, 0], [0, 400], [300, 400]])
print(img.shape)
# 生成透视变换矩阵;进行透视变换
m = cv2.getPerspectiveTransform(src, dst)
print("warpMatrix:")
print(m)
result = cv2.warpPerspective(result3, m, (300, 400))
cv2.imshow("src", img)
cv2.imshow("result", result)
cv2.waitKey(0)

import numpy as np
def WarpPerspectiveMatrix(src, dst):
assert src.shape[0] == dst.shape[0] and src.shape[0] >= 4
nums = src.shape[0]
A = np.zeros((2*nums, 8)) # A*warpMatrix=B
B = np.zeros((2*nums, 1))
for i in range(0, nums):
A_i = src[i,:]
B_i = dst[i,:]
A[2*i, :] = [A_i[0], A_i[1], 1, 0, 0, 0,
-A_i[0]*B_i[0], -A_i[1]*B_i[0]]
B[2*i] = B_i[0]
A[2*i+1, :] = [0, 0, 0, A_i[0], A_i[1], 1,
-A_i[0]*B_i[1], -A_i[1]*B_i[1]]
B[2*i+1] = B_i[1]
A = np.mat(A)
#用A.I求出A的逆矩阵,然后与B相乘,求出warpMatrix
warpMatrix = A.I * B #求出a_11, a_12, a_13, a_21, a_22, a_23, a_31, a_32
#之后为结果的后处理
warpMatrix = np.array(warpMatrix).T[0]
warpMatrix = np.insert(warpMatrix, warpMatrix.shape[0], values=1.0, axis=0) #插入a_33 = 1
warpMatrix = warpMatrix.reshape((3, 3))
return warpMatrix
if __name__ == '__main__':
print('warpMatrix')
src = [[10.0, 457.0], [395.0, 291.0], [624.0, 291.0], [1000.0, 457.0]]
src = np.array(src)
dst = [[46.0, 920.0], [46.0, 100.0], [600.0, 100.0], [600.0, 920.0]]
dst = np.array(dst)
warpMatrix = WarpPerspectiveMatrix(src, dst)
print(warpMatrix)
应用
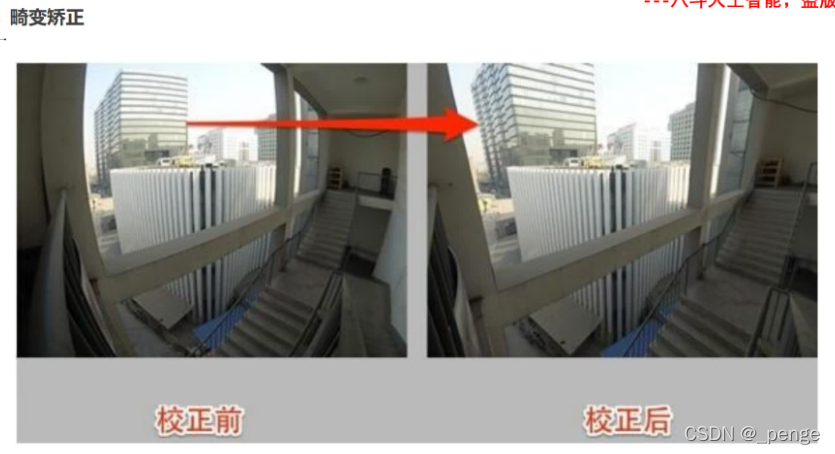
透视变换可以将左图栏杆弯曲的部分投影到新的平面,达到呈直线的效果。

技术共进,成长同行——讯飞AI开发者社区
更多推荐

 0
0 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)