
多传感器融合之相机标定步骤(含张正友标定)
主要在于坐标系的转换以及相机内外参的标定。相机的标定步骤可以参考以下手稿。
·
相机的标定步骤可以参考以下手稿
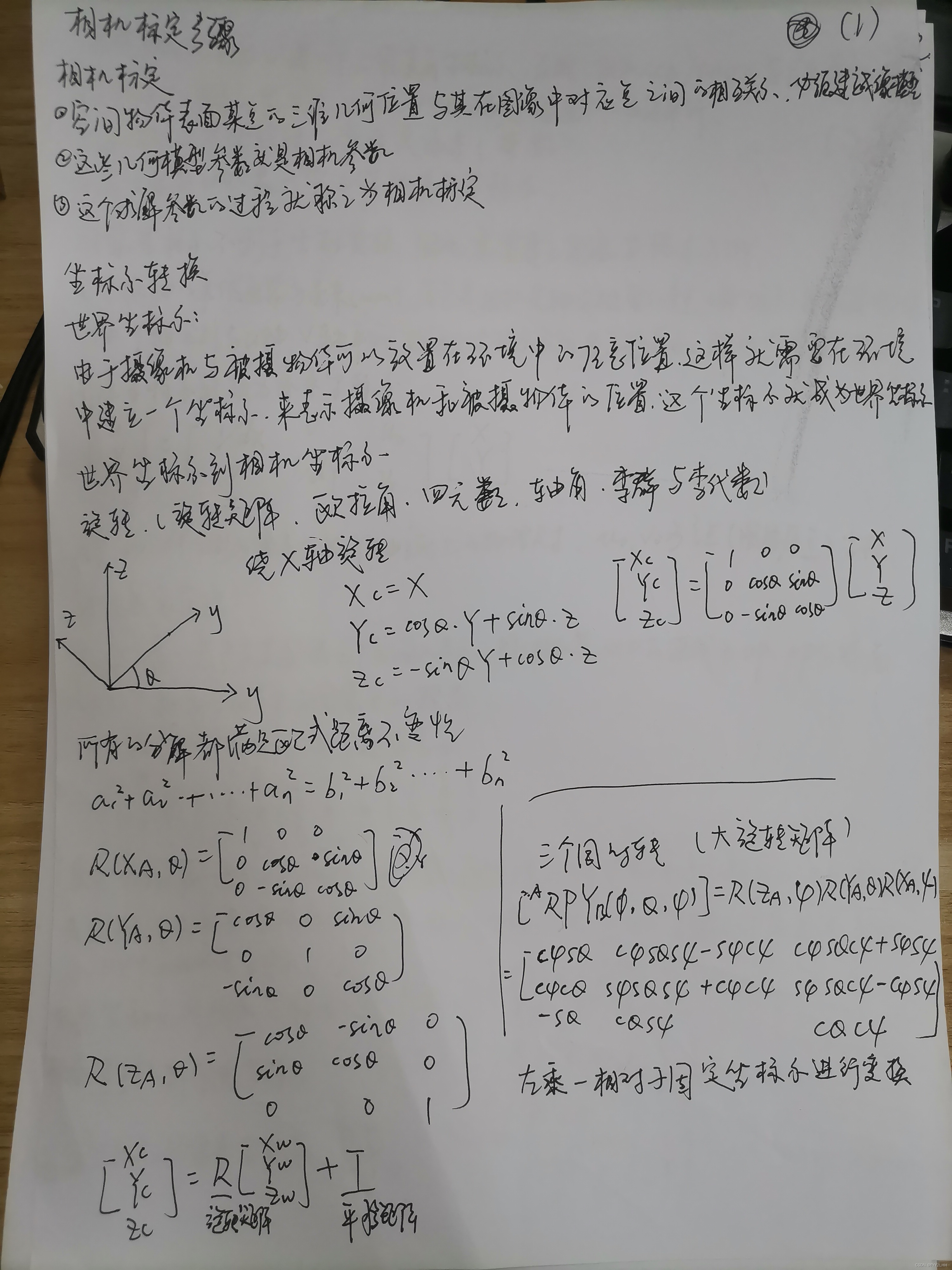
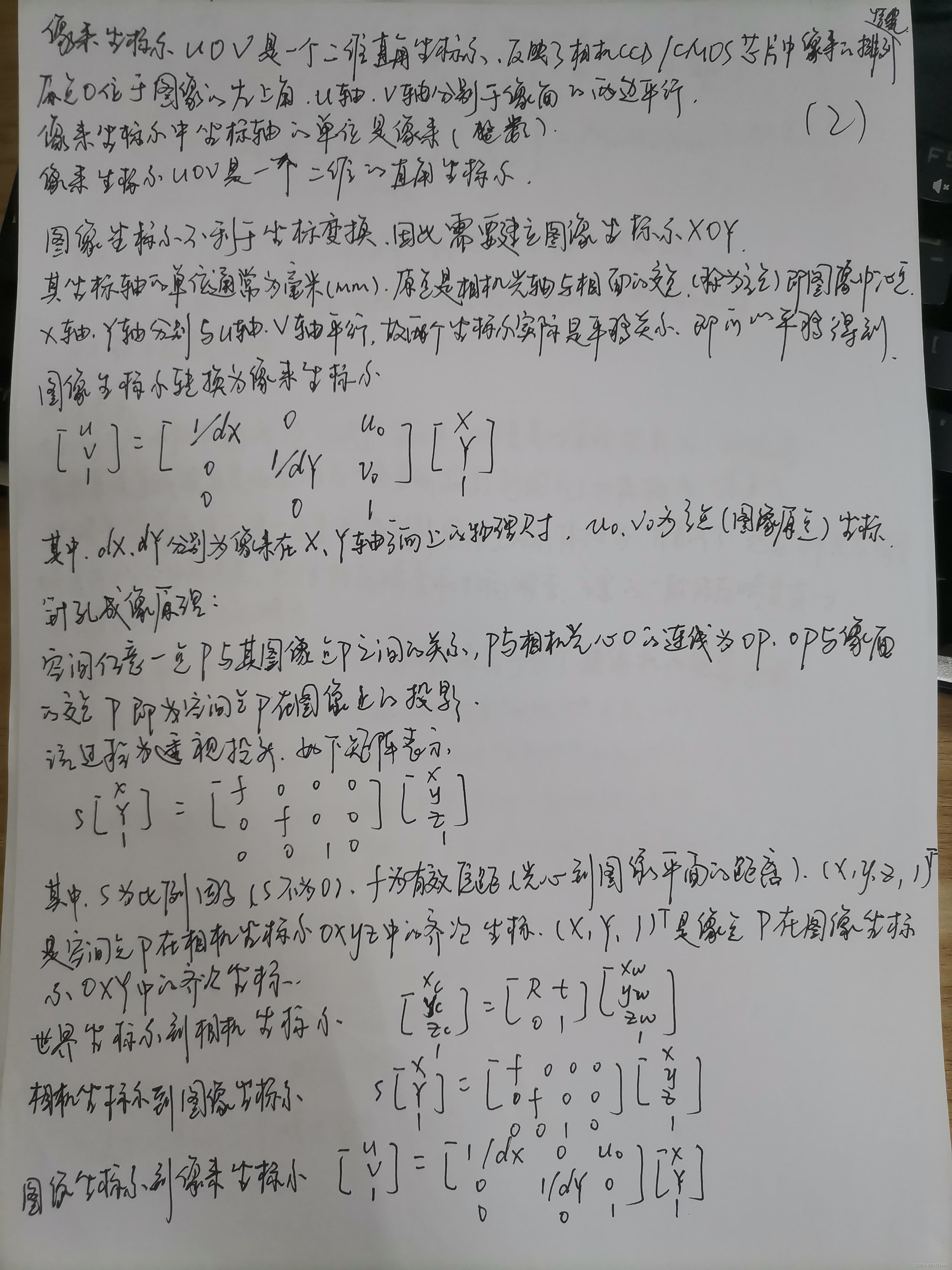
主要在于坐标系的转换以及相机内外参的标定
张正友标定方法是目前求解求解相机内参和畸变系数的经典方法,也是最受欢迎的方法。
通过采集至少两张不同角度的平面标定板图像;
相机标定是三维场景重构中必不可少的步骤,目的是提取出二维图像中包含的计量信息。
相机标定方法分为:传统的摄影测量标定方法和自标定方法;
张正友标定方法介于传统的摄影测量标定方法和自标定方法之间;
方法相较于其他方法更便捷和精度,稳定;
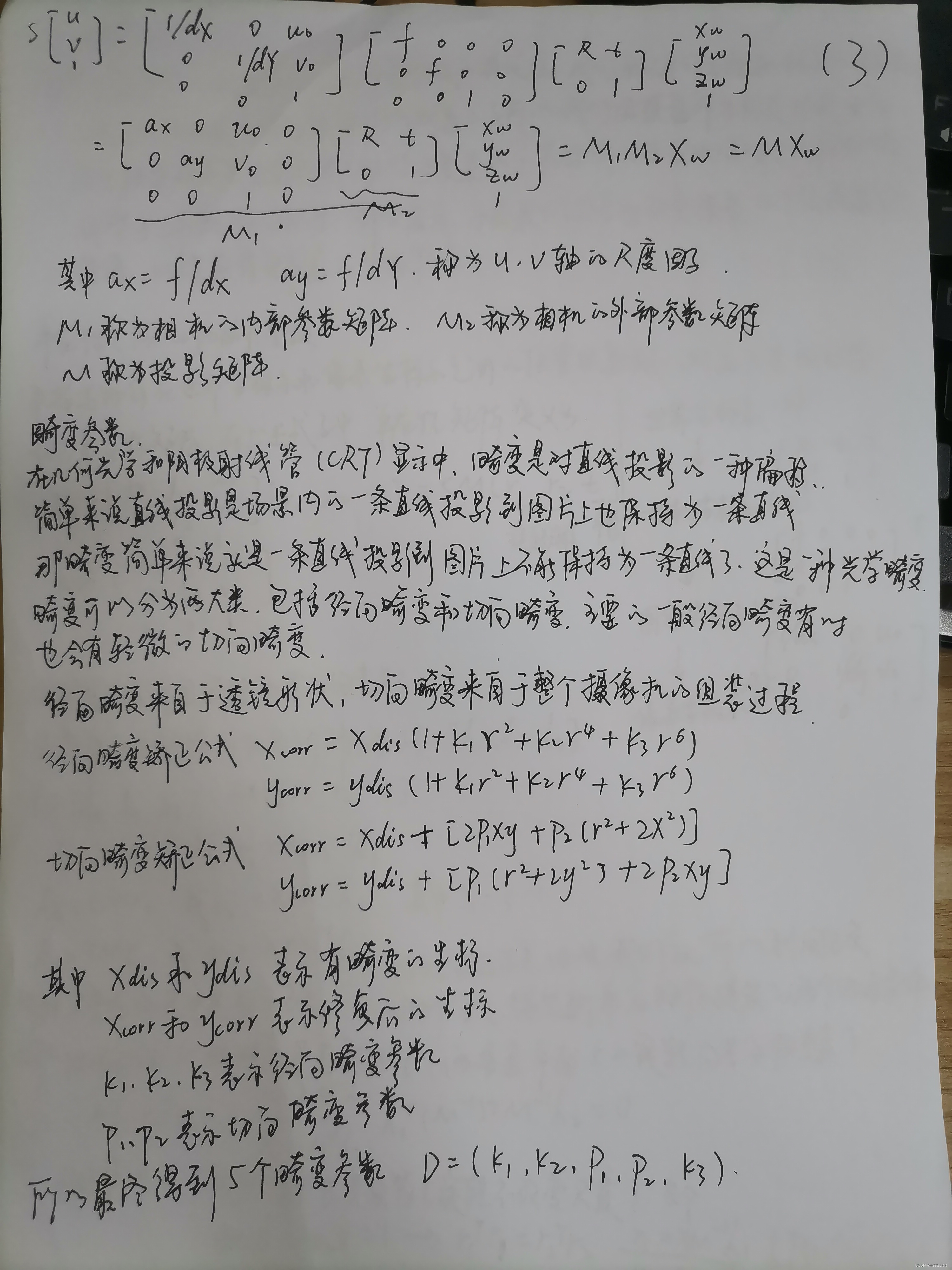
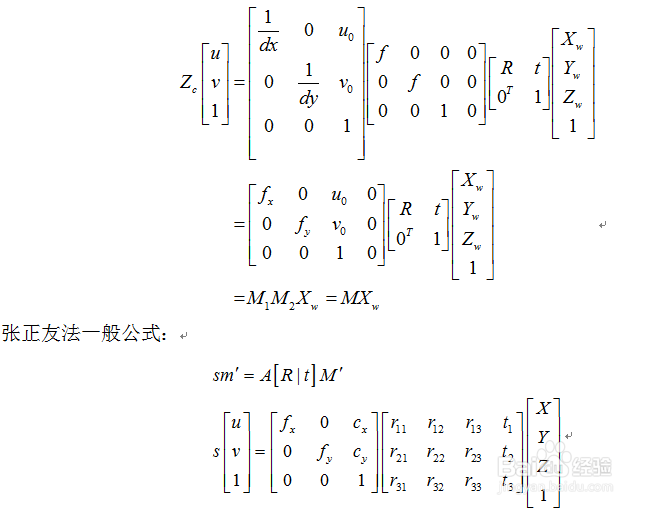
张正友标定方法的透镜模型如下:
工具/原料
-
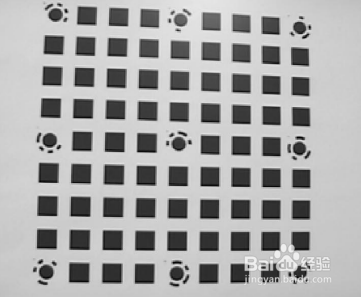
棋盘格标定板
方法/步骤
-
1
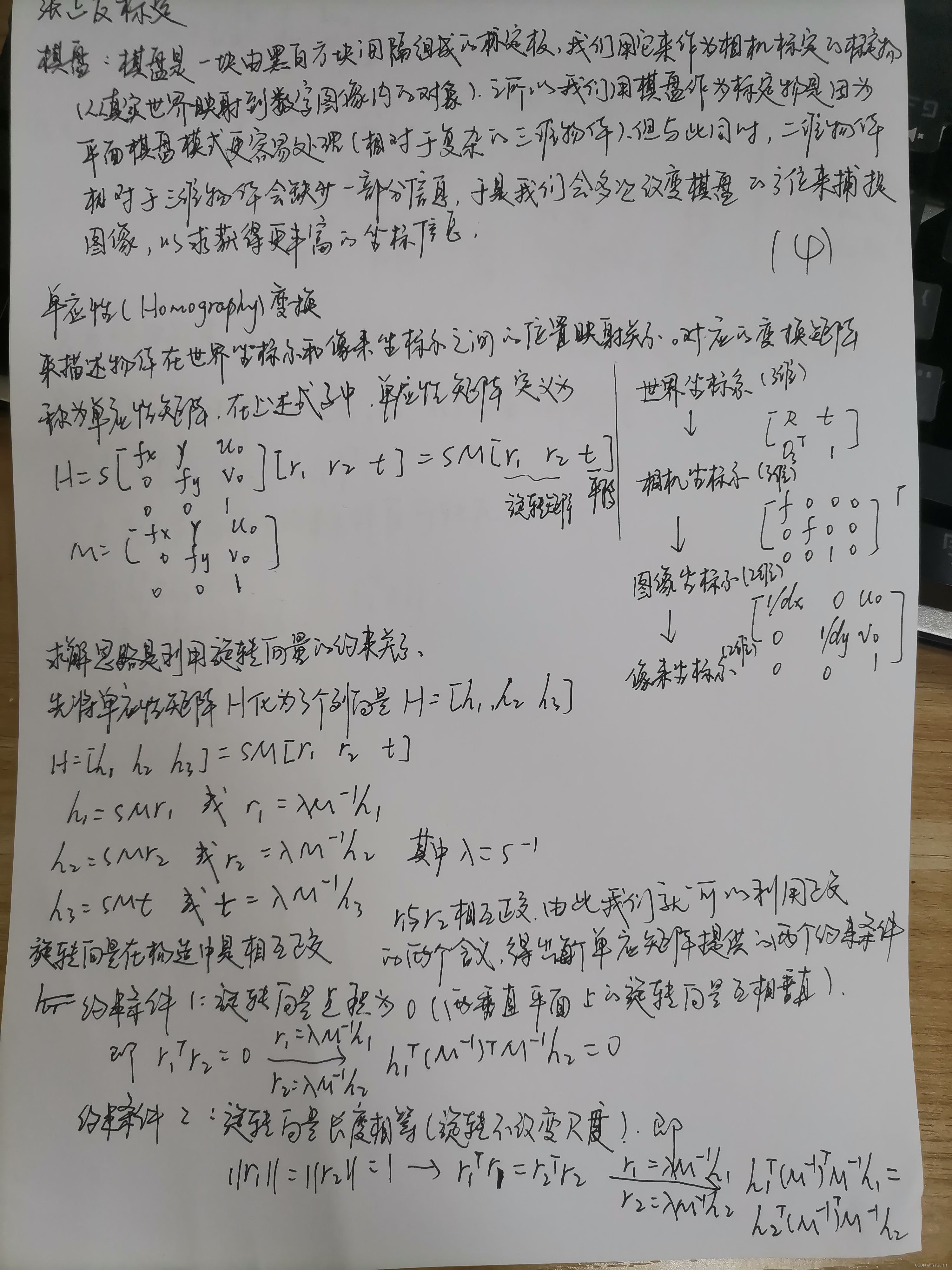
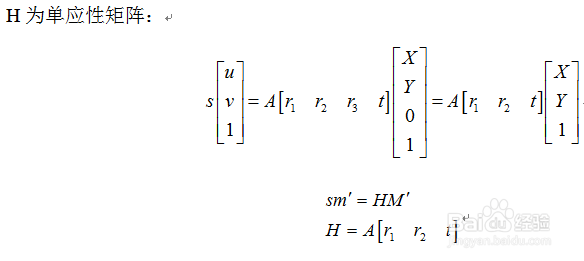
平面标定板和图像之间的单应性矩阵H:
一般以平面标定板上左上角的点为世界坐标系的原点,其XOY平面与标定板平面重合;
故标定板上的点其Z=0;
则透镜模型可变为:
H为单应性矩阵:
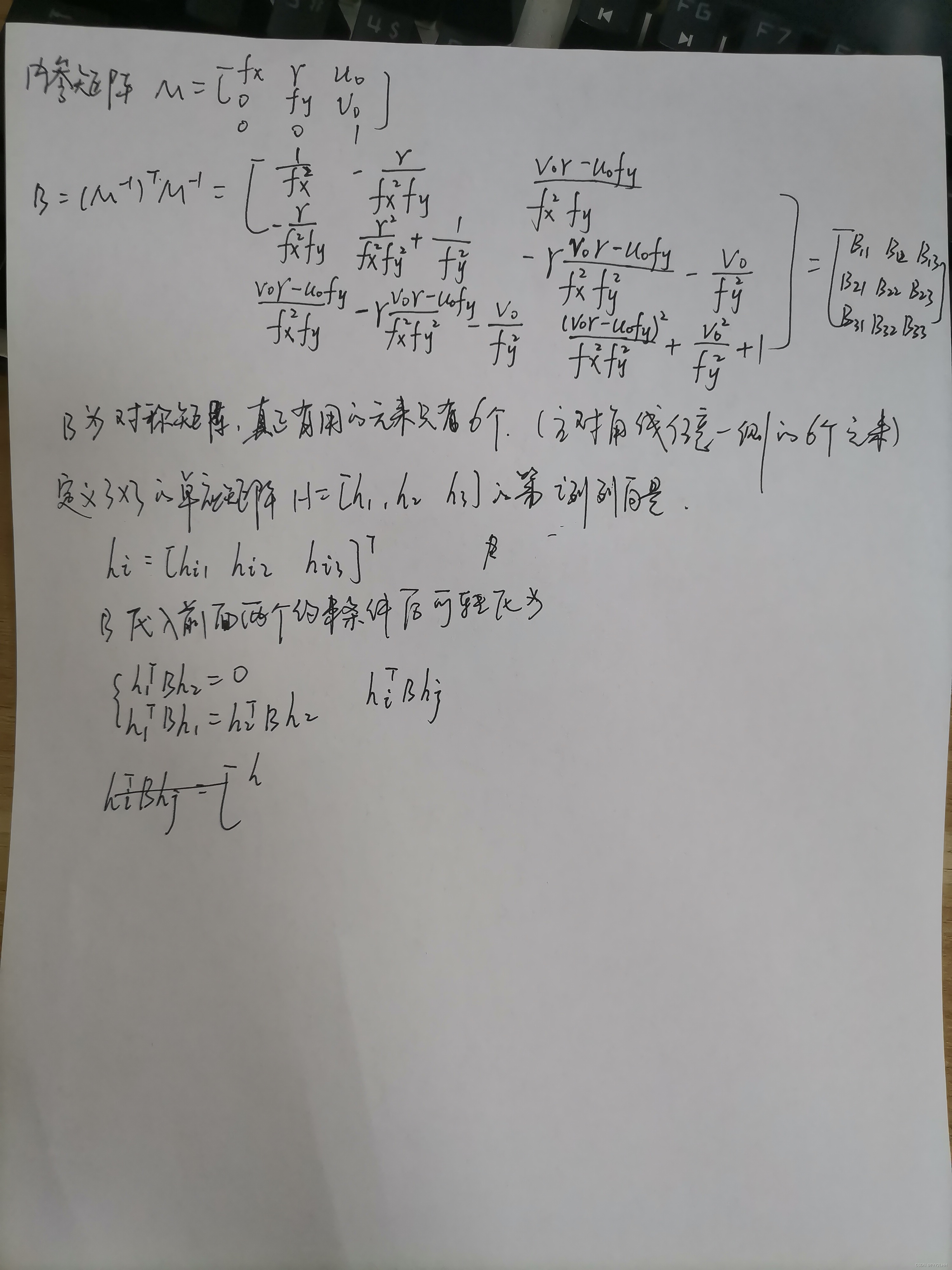
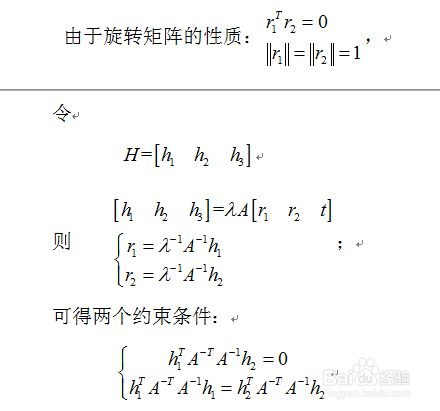
- 求内参的约束条件如下所示:
-
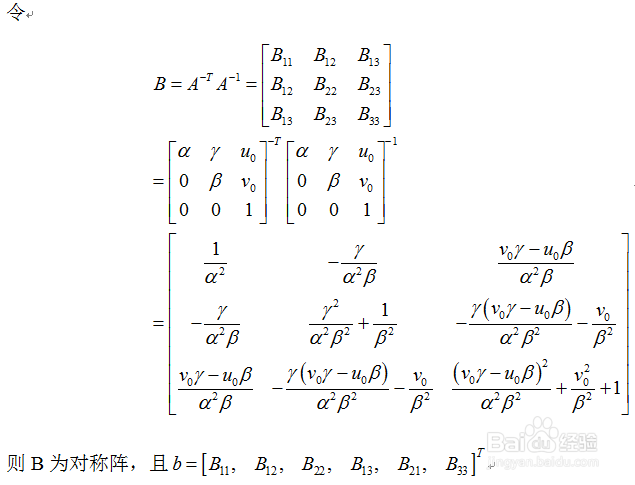
闭合解(closed-form solution)方法:如下所示
-
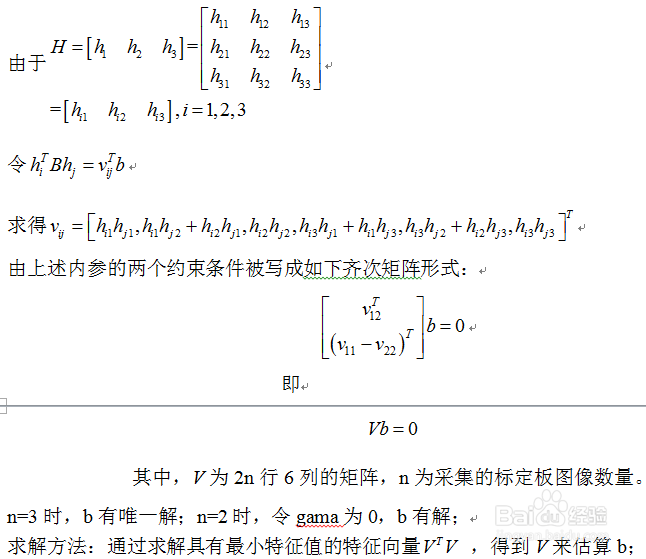
约束条件转换如下所示
-
-
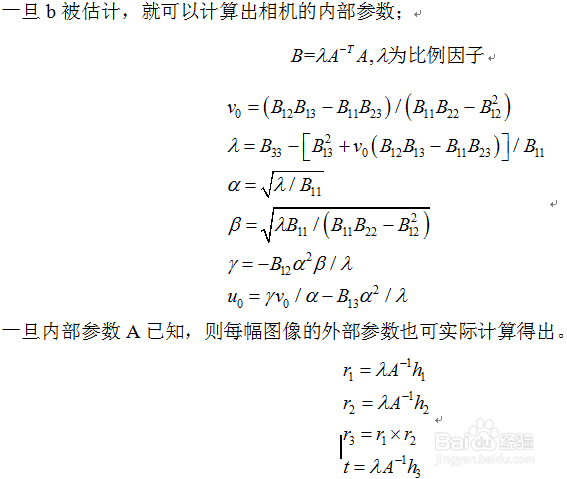
相机内部参数求解:
-
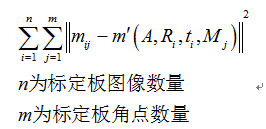
最大似然估计优化
由最大似然估计的非线性优化方法对参数进行优化。
-
张正友标定方法总结
(1)设定标定板
(2)旋转标定板或相机,采集标定板图像
(3)检测图像特征点
(4)估计5个相机内参,和外部参数
(5)参数优化

技术共进,成长同行——讯飞AI开发者社区
更多推荐
 2
2 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)