
嵌入式硬件篇---麦克纳姆轮&手柄遥控
本文仅仅简单介绍了麦克纳姆轮的使用,麦克纳姆轮的控制,麦克纳姆轮的运动状态解算
·
文章目录
前言
在竞赛中通常需要完成一些特殊任务,需要全向移动。由此,我们可能用到麦克纳姆轮或者全向轮(轮毂轴和辊子转轴所成角度的区别)。本文会主要讲解麦克纳姆轮以及手柄遥控。
第一部分:麦克纳姆轮介绍
麦克纳姆轮是在旋转方向上互为镜像,但不能通过旋转和平移完全重合(手性对称),分为A轮、B轮
麦克纳姆轮,四个为一组,安装方式有多种。
麦克纳姆轮,通过四个轮子不同的安装方式及其转速实现不同的移动效果。(我们可以通过的推动小车,观察四个麦克纳姆轮的转动状态)
第二部分:麦克纳姆轮使用
麦克纳姆轮使用,根据目的运动效果,通过运动学模型计算出各个轮子的转动状态(转向和转速)
第三部分:麦克纳姆轮控制
X轴速度 、Y轴速度、角速度(自转角)三部分来构成麦轮控制,轮子转动速度沿着辊子转动的方向(辊子的力也是沿着辊子转动方向)
1.轮子布局

2.轮子工作状态
A轮:辊子只能向左前或者右后
B轮:辊子只能向右前或者左后
轮子的受力:只能沿着辊子水平方向,因此每个麦克纳姆轮只能产生和滚轴同向的两个方向的速度
第四部分:麦克纳姆轮解算
1.向前运动

2.向后运动

3.向左运动

4.向右运动

5.向左旋转

6.向右旋转

麦克纳姆轮四个轮子,两两具有线性叠加性质(因此每次分别分析单个轮子)
7.解算
解算算法: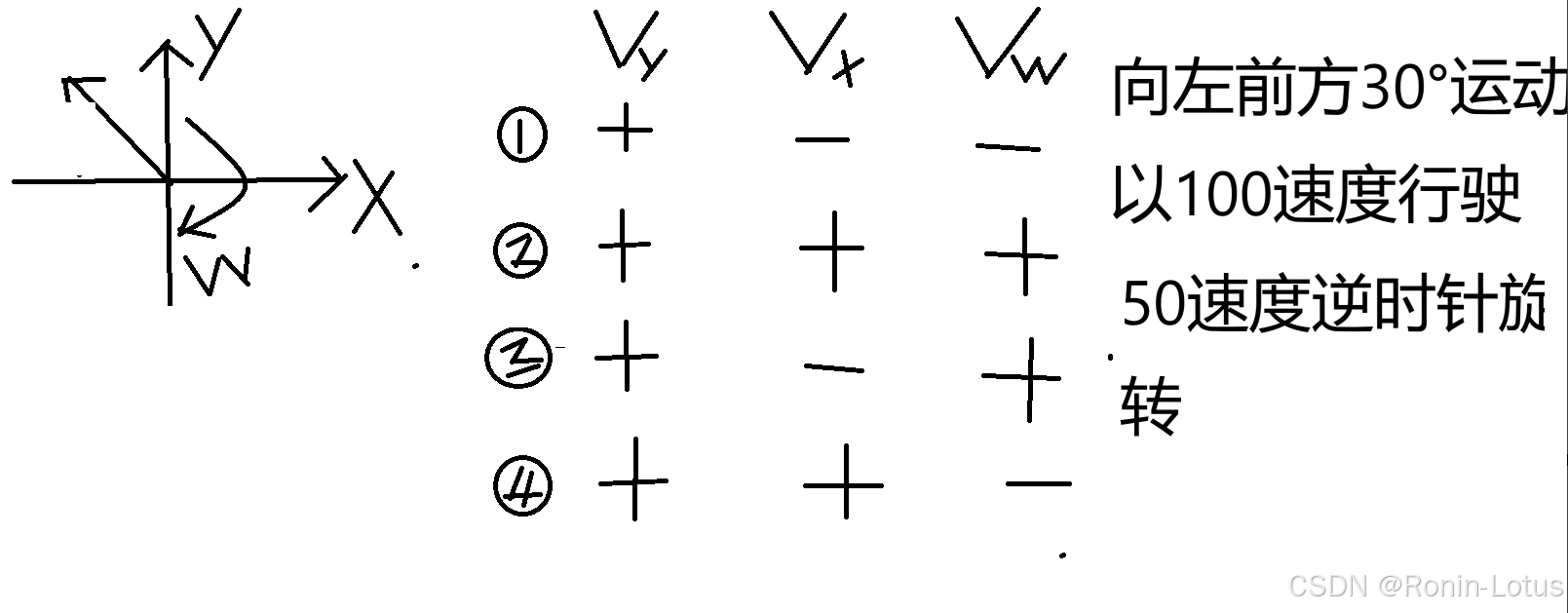
每个麦克纳姆轮最终转向以及速度,根据上图正负值相加确定
最终通过编写程序通过电机控制麦克纳姆轮转向以及转速实现小车整体目标移动效果
注意:由于电机转速可能受限,因此需要进行适当的等比限幅处理
第五部分:手柄遥控
小知识点:
- 无线手柄通过无线通信,每一个按键以及遥杆对应一个数组数值,传输到控制机上对应相应的控制操作。
- PS2手柄,按下按键相应数组bit位值置零。 需要根据手柄接收器的使用手册(通信规则)进行相应的编程控制。
- 要关注手柄工作状态(红灯模式(摇杆有效)还是绿灯模式(按键有效)),不同工作状态手柄按键操作功能不同
- 控制机,通过循环查询的方法来获取手柄遥控信息(所以需要注意时间延迟),通过使用延迟函数到达控制查询频率的效果
- 下位机(控制机)需要直接和手柄接收器之间通信,手柄接收器在与手柄遥控器进行通信
- 红灯模式及摇杆模式时,摇杆上每一个位置都会对应相应的数值,进而区别不同的摇杆状态
- 手柄摇杆X轴、Y轴分别对应控制舵机、电机
- 控制数值进行限制处理,进一步减少误碰导致的误操作(-128–127等)
- 通过舵机阈值映射操作,实现手柄控制舵机
总结
以上就是今天要讲的内容,本文仅仅简单介绍了麦克纳姆轮的使用,麦克纳姆轮的控制,麦克纳姆轮的运动状态解算

技术共进,成长同行——讯飞AI开发者社区
更多推荐

 19
19 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)