
STM32F4嵌入式系统高级设计:多传感器集成与无线通信
本文还有配套的精品资源,点击获取简介:本项目以STM32F4微控制器为基础,应用Keil5开发环境设计了一个高级嵌入式系统。系统整合了七个超声波传感器用于全方位距离检测,利用MPU6050进行运动和倾斜感应,通过WIFI模块实现远程数据传输,并使用SPI通信协议连接外部设备。项目文件还包含开发心得与代码实现细节,涵盖了多种技术的综合应用,具有重要的学习和应用价值。...

简介:本项目以STM32F4微控制器为基础,应用Keil5开发环境设计了一个高级嵌入式系统。系统整合了七个超声波传感器用于全方位距离检测,利用MPU6050进行运动和倾斜感应,通过WIFI模块实现远程数据传输,并使用SPI通信协议连接外部设备。项目文件还包含开发心得与代码实现细节,涵盖了多种技术的综合应用,具有重要的学习和应用价值。
1. STM32F4嵌入式系统设计
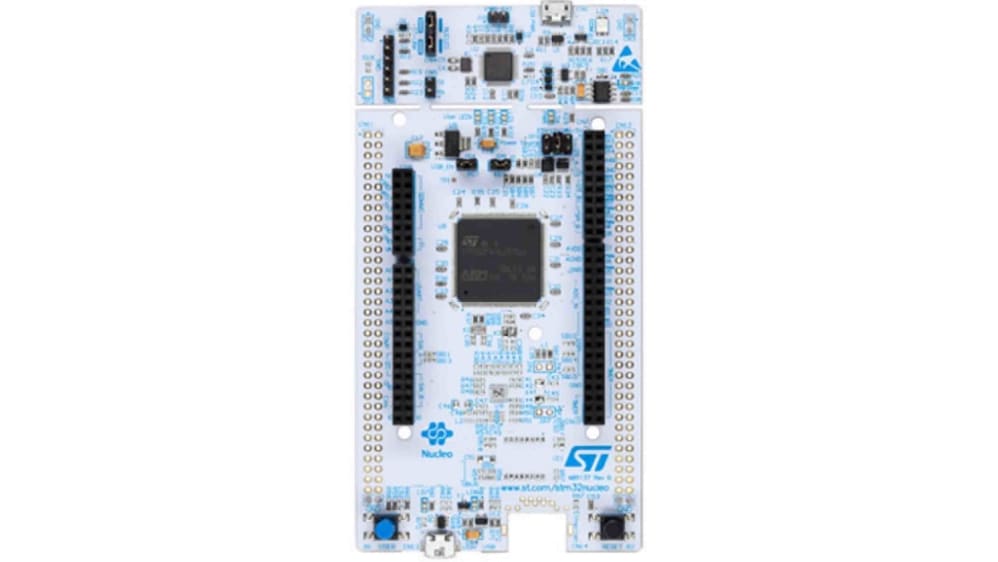
嵌入式系统因其在工业自动化、智能设备、医疗监控等领域的广泛应用而倍受关注。STM32F4系列微控制器以其高性能、高集成度和丰富的功能,在众多微控制器中脱颖而出,成为工程师的首选。在项目开发中,选择适合的微控制器是设计成功的关键一步。
1.1 STM32F4概述与选型依据
1.1.1 STM32F4的特点与性能
STM32F4系列芯片具备高性能的ARM Cortex-M4核心,其运行频率高达180MHz,并具有单周期乘法和除法指令的DSP指令集。在处理复杂算法如FFT(快速傅里叶变换)时,能显著提升效率。其集成的浮点单元(FPU)也为处理浮点运算提供了方便。
1.1.2 项目中的选型考虑
在选择STM32F4芯片时,通常会考虑其内存大小、处理能力、以及外设需求等因素。例如,对于需要处理大量数据和高性能图形显示的应用,会优先选择内存更大、外设接口更丰富的F407或F417型号。此外,开发预算和产品功耗要求也是选型的重要依据。
1.2 STM32F4系统架构设计
1.2.1 核心功能与模块划分
在设计STM32F4系统时,首先需要明确系统的功能需求,将核心功能从辅助功能中区分出来,并进行模块化设计。例如,设计一个数据采集系统,其核心功能可能包括数据采集、数据处理和无线数据传输。将这些功能独立成模块,有助于代码的优化与维护。
1.2.2 硬件接口与外围设备匹配
设计硬件接口时,需要根据外围设备的技术规格书进行适配设计。以STM32F4为例,其丰富的GPIO口和标准通信接口(如I2C、SPI、UART)使得连接各种外围设备变得非常灵活。在设计时,还需要考虑电源、时钟、复位等基本外围电路的设计。
1.3 STM32F4的开发环境搭建
1.3.1 开发工具链的选择
对于STM32F4系列微控制器,Keil MDK-ARM是广泛使用的开发工具链。它提供了丰富的库文件和底层硬件驱动支持。除此之外,IAR Embedded Workbench、GCC-based IDEs如Eclipse配合ARM编译器等也是不错的选择。开发者应根据项目需求和个人喜好进行选择。
1.3.2 初始工程的创建与配置
创建工程是开发的第一步。在Keil MDK-ARM中,开发者需要创建一个新工程,并根据目标STM32F4型号添加相应的芯片支持包。此外,工程设置中需要配置存储器布局、堆栈大小、启动文件等,这些将直接影响程序的运行效率和稳定性。
以上内容为第一章的概述,接下来的章节内容将分别展开介绍各主题的详细信息。通过深入探讨STM32F4的系统架构、开发环境搭建和应用等,将带领读者逐步了解并掌握STM32F4嵌入式系统设计的核心要点。
2. Keil5开发环境应用
2.1 Keil5开发环境概览
2.1.1 Keil5界面布局与功能介绍
Keil μVision5 是一款流行的ARM微控制器开发工具,提供了一个集成开发环境(IDE),用于编程、调试和分析嵌入式应用程序。Keil IDE 的界面布局清晰,可以分为几个主要区域,包括项目窗口、编辑器窗口、输出窗口以及菜单栏和工具栏。
- 项目窗口 :这是Keil IDE中用于管理项目和文件的地方,用户可以通过它来添加、删除和组织文件。
- 编辑器窗口 :用来编写和编辑代码。它支持语法高亮显示、代码折叠、自动缩进等特性,以提高开发效率。
- 输出窗口 :该区域显示编译和链接过程中的信息,以及调试器提供的反馈,对于开发者而言,是调试程序时的重要参考。
- 菜单栏和工具栏 :提供对IDE功能的访问,例如新建项目、打开项目、保存文件、编译项目、调试控制等。
2.1.2 环境配置要点
在开始使用Keil进行开发之前,需要对环境进行配置,包括:
- 安装Keil μVision5 :访问ARM官网或其授权合作伙伴网站下载安装包,并遵循安装向导完成安装。
- 安装软件包和工具链 :确保安装了正确的软件包和适用于目标微控制器(如STM32F4)的ARM编译器。
- 设置目标微控制器和调试器 :在Keil环境中配置目标微控制器的型号,并选择适合的调试器/编程器(如ST-Link)。
- 配置编译器和链接器选项 :为了优化性能和代码大小,开发者需要根据需要调整编译器和链接器的设置。
2.2 Keil5中的项目管理与编译
2.2.1 创建项目与源文件管理
创建一个项目的第一步是在Keil μVision5中新建一个项目,然后配置好微控制器和必要的工具链,例如:
- 打开Keil μVision5,点击菜单栏的“Project” > “New uVision Project…”。
- 选择保存项目的位置,给项目命名,并点击“Save”。
- 在“Select Device for Target”对话框中,搜索并选择对应的微控制器型号,例如STM32F4系列。
- 完成创建后,项目会出现在项目窗口中。开发者可以通过右击项目或文件夹,在弹出的菜单中选择“Add New Item to Group...”来添加新的源文件(.c/.h)、汇编文件(.s/.asm)等。
- Keil允许用户通过项目树来组织文件和文件夹,从而管理项目内容。
2.2.2 编译设置与编译过程监控
配置好项目和源文件之后,需要设置编译选项,以确保代码能被正确编译:
- 点击项目窗口中的“Target”文件夹,选择“Options for Target”进行编译设置。
- 在弹出的对话框中,可以设置编译器和链接器的相关选项,例如优化级别、堆栈大小、内存配置等。
- 确认无误后,点击“OK”保存设置,并关闭对话框。
- 编译项目时,点击工具栏上的“Build”按钮(或使用快捷键“Ctrl+F7”),编译过程的详细信息会显示在输出窗口中。
- 如果编译出现错误或警告,Keil会在输出窗口中高亮显示这些问题所在的位置,开发者可以双击以快速定位。
2.3 Keil5的调试工具使用
2.3.1 调试环境设置与常用调试命令
Keil μVision5 提供了强大的调试工具,可以帮助开发者检查程序的执行情况和变量的值,找出潜在的错误。
- 在开始调试之前,需要确保调试器(如ST-Link)已连接到开发板,并正确配置到项目中。
- 设置断点,以便在特定代码行暂停执行。在编辑器窗口中双击左边的边界,或右击代码行选择“Insert/Remove Breakpoint”。
- 使用调试菜单或工具栏上的调试按钮,如“Start/Stop Debug Session”、“Step Over”、“Step Into”、“Step Out”等,对程序进行单步执行或连续执行。
- 观察变量或寄存器的值,可以通过“Watch Window”添加需要监视的变量或寄存器。
- 查看和修改内存内容,可以使用“Memory Window”进行。
2.3.2 调试技巧与常见问题解决
在调试过程中,掌握一些技巧可以帮助更有效地定位和解决问题:
- 利用“Run to Cursor”功能,可以让程序运行至光标所在的位置,这在已经知道问题出在哪里时特别有用。
- 如果程序异常,可以利用“Reset”按钮重置系统,然后重新开始调试。
- 当遇到程序卡在某个循环或者函数中时,使用“Step Out”可以快速跳出,避免重复执行不必要的步骤。
- 如果使用外部调试器,确保调试器的配置与开发板相匹配,否则可能会出现连接失败的问题。
- 调试时如果程序崩溃,注意查看堆栈跟踪信息,这通常能提供崩溃前程序运行情况的线索。
通过以上章节,我们可以了解到Keil5开发环境的基本布局和功能,如何创建和管理项目,以及使用Keil5进行代码编译和调试的详细步骤和技巧。掌握这些内容,对于STM32F4项目的开发来说是基础且必不可少的。随着我们在后续章节中深入到具体的硬件接口和应用开发,Keil5环境的使用将会更加频繁且高效。
3. 多个超声波传感器集成
3.1 超声波传感器的工作原理
3.1.1 超声波测距原理简介
超声波传感器工作原理基于声波在介质中的传播特性。在超声波测距中,传感器发出一定频率的超声波脉冲,这些声波在遇到障碍物后反射回来,传感器通过计算声波发射和接收之间的时间差,再结合声波在介质中的传播速度,就可以计算出距离。该技术广泛应用于距离测量、物体检测、避障等场景。
3.1.2 传感器模型与选型指导
超声波传感器有多种类型,常见的有HC-SR04、MB1240等。以HC-SR04为例,它具有4个引脚:VCC、Trig(触发)、Echo(回声)、GND。在选择传感器时,应考虑量程、精度、工作电压、触发方式和输出形式等因素。例如,对于室内环境可以考虑HC-SR04,而对于室外环境,则可能需要选用更坚固耐用的型号。
3.2 超声波传感器数据采集
3.2.1 传感器与STM32F4的接口配置
在STM32F4系统中,需要配置GPIO引脚以提供触发信号和接收回声信号。Trig引脚连接到STM32F4的输出引脚,Echo引脚连接到输入引脚,并配置为外部中断输入,以便精确测量回声信号的持续时间。
#define TRIG_PIN GPIO_Pin_0
#define ECHO_PIN GPIO_Pin_1
#define TRIG_PORT GPIOA
#define ECHO_PORT GPIOA
void Ultrasonic_Init(void) {
GPIO_InitTypeDef GPIO_InitStructure;
// 使能GPIOA时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
// 配置Trig引脚为推挽输出模式
GPIO_InitStructure.GPIO_Pin = TRIG_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(TRIG_PORT, &GPIO_InitStructure);
// 配置Echo引脚为浮空输入模式
GPIO_InitStructure.GPIO_Pin = ECHO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(ECHO_PORT, &GPIO_InitStructure);
}
3.2.2 数据采集程序实现
数据采集程序需要生成一个10微秒的触发信号,然后启动一个定时器来测量Echo引脚高电平持续的时间。这个时间乘以声速(在空气中约为340米/秒),再除以2(因为声波往返),得到的是距离。
uint32_t Ultrasonic_GetDistance(void) {
uint32_t distance = 0;
uint32_t timer = 0;
uint32_t startTick, endTick;
// 发送10微秒的触发信号
GPIO_SetBits(TRIG_PORT, TRIG_PIN);
for (startTick = SysTick->VAL; (GPIO_ReadInputDataBit(ECHO_PORT, ECHO_PIN) == RESET) && (startTick - SysTick->VAL < 10000););
GPIO_ResetBits(TRIG_PORT, TRIG_PIN);
// 等待Echo引脚变为高电平
while (GPIO_ReadInputDataBit(ECHO_PORT, ECHO_PIN) == RESET);
startTick = SysTick->VAL;
// 等待Echo引脚变为低电平,并记录时间
while (GPIO_ReadInputDataBit(ECHO_PORT, ECHO_PIN) == SET);
endTick = SysTick->VAL;
// 计算高电平持续时间
timer = (SysTick->LOAD - endTick) + startTick;
if (timer < 10) {
return 0; // 防止定时器溢出错误
}
// 计算距离
distance = (uint32_t)((timer * .0343) / 2);
return distance;
}
3.3 超声波数据处理与应用
3.3.1 数据滤波与异常值处理
在实际应用中,由于环境因素影响,如风速、湿度、温度等,获取的数据可能存在噪声和异常值。因此需要对数据进行滤波处理。常见的滤波方法有平均滤波、中值滤波、卡尔曼滤波等。这里可以使用简单的移动平均滤波来处理数据,提高测距的准确性。
#define FILTER_SIZE 5
uint32_t distanceArray[FILTER_SIZE];
uint32_t index = 0;
void Ultrasonic_Filtration(uint32_t newDistance) {
uint32_t sum = 0;
uint32_t averageDistance;
// 新数据存入数组
distanceArray[index++] = newDistance;
if (index >= FILTER_SIZE) {
index = 0;
}
// 计算平均值
for (int i = 0; i < FILTER_SIZE; i++) {
sum += distanceArray[i];
}
averageDistance = sum / FILTER_SIZE;
// 更新距离值
// distance = averageDistance;
}
3.3.2 应用场景与数据融合策略
超声波传感器适用于近距离测量,因此在集成多个传感器时,可以用于机器人避障、液位监测、车辆距离检测等。在多传感器融合时,可以结合其他传感器数据,如陀螺仪、加速度计等,通过数据融合算法,如卡尔曼滤波,来实现更精确的环境建模和状态估计。
4. MPU6050运动与倾斜感应
4.1 MPU6050传感器概述
4.1.1 传感器特性与应用领域
MPU6050是一个6轴的运动跟踪设备,集成了3轴陀螺仪和3轴加速度计。其通过I2C通信协议与主控制器进行交互。传感器的特性使其成为设计各种应用系统(如无人机飞行控制、机器人平衡控制、VR头戴设备等)的理想选择。
陀螺仪与加速度计的整合优势
陀螺仪和加速度计的结合使***0能够同时提供高精度的运动追踪和倾斜检测功能。陀螺仪测量角速度,对快速动态动作的响应更好,但会有累积误差;加速度计测量线性加速度,能够提供稳定的倾斜参考,但容易受到其他外力干扰。将两者结合,可以互补各自的缺点,提供更加稳定和准确的运动数据。
4.1.2 与STM32F4的连接方案
MPU6050通过I2C总线与STM32F4微控制器连接。I2C总线只需要两条线(SDA和SCL)即可实现双向通信,同时也可以连接多个从设备。根据STM32F4的硬件I2C接口规格,我们可以将MPU6050的SDA和SCL引脚分别连接到STM32F4相应引脚上,同时还需要连接地线和电源线。为了确保通信的稳定性,连接时应尽量减少布线长度,并在适当的电源上加上适当的去耦电容。
4.2 MPU6050数据采集与校准
4.2.1 初始化配置与数据读取
MPU6050的初始化配置涉及设置其内部寄存器,以确定采样率、量程、滤波器等参数。以下是使用STM32 HAL库进行初始化配置的示例代码:
// MPU6050初始化
void MPU6050_Init(void) {
// 初始化I2C接口,配置为I2C1
MX_I2C1_Init();
// 复位MPU6050设备
MPU6050_WriteByte(MPU6050_ADDR, PWR_MGMT_1, 0x80);
HAL_Delay(100);
// 配置采样率和陀螺仪/加速度计量程
MPU6050_WriteByte(MPU6050_ADDR, SMPLRT_DIV, 0x07);
MPU6050_WriteByte(MPU6050_ADDR, CONFIG, 0x00);
MPU6050_WriteByte(MPU6050_ADDR, GYRO_CONFIG, 0x00);
MPU6050_WriteByte(MPU6050_ADDR, ACCEL_CONFIG, 0x00);
// 取消休眠模式,开始数据采集
MPU6050_WriteByte(MPU6050_ADDR, PWR_MGMT_1, 0x00);
}
// I2C设备写入单个字节
HAL_StatusTypeDef MPU6050_WriteByte(uint8_t devAddr, uint8_t reg, uint8_t data) {
return HAL_I2C_Master_Transmit(&hi2c1, devAddr, &data, 1, 10);
}
// I2C设备读取单个字节
HAL_StatusTypeDef MPU6050_ReadByte(uint8_t devAddr, uint8_t reg, uint8_t* data) {
return HAL_I2C_Master_Transmit(&hi2c1, devAddr, ®, 1, 10);
}
4.2.2 校准方法与数据准确性提升
校准是提升传感器数据准确性的关键步骤。可以通过采集一段时间内的静止数据,计算出加速度计和陀螺仪的零点偏移。后续的数据采集时,就可以从测量值中减去这些偏移量。
// 校准加速度计零点偏移
void Calibrate_Accel(int32_t* accel_bias) {
uint8_t data[6]; // 用于存储读取数据
uint32_t ii, packet_count, fifo_count;
int32_t accel_bias_reg[3] = {0, 0, 0};
// 重置传感器
MPU6050_WriteByte(MPU6050_ADDR, PWR_MGMT_1, 0x80);
HAL_Delay(100);
// 配置为正常模式
MPU6050_WriteByte(MPU6050_ADDR, PWR_MGMT_1, 0x00);
HAL_Delay(100);
// 读取校准寄存器
MPU6050_ReadByte(MPU6050_ADDR, ACCEL_XOUT_H, data, 2);
packet_count = data[0] * 256 + data[1]; // 2字节数据
fifo_count = packet_count / 7; // FIFO中数据的数目
for(ii = 0; ii < fifo_count; ii++) {
// 等待FIFO中数据准备好
while (MPU6050_ReadByte(MPU6050_ADDR, INT_STATUS, data, 1) == HAL_OK) {
if (data[0] & 0x02) { // FIFO计数到位
MPU6050_ReadByte(MPU6050_ADDR, FIFO_COUNTH, data, 2);
fifo_count = (data[0] << 8) + data[1];
// 从FIFO读取数据
MPU6050_ReadByte(MPU6050_ADDR, ACCEL_XOUT_H, data, 6);
// 将数据加入总和
accel_bias_reg[0] += (int16_t)(((int16_t)data[0] << 8) | data[1]);
accel_bias_reg[1] += (int16_t)(((int16_t)data[2] << 8) | data[3]);
accel_bias_reg[2] += (int16_t)(((int16_t)data[4] << 8) | data[5]);
}
}
}
accel_bias[0] = (int32_t)accel_bias_reg[0] / fifo_count; // 计算加速度计的偏差
accel_bias[1] = (int32_t)accel_bias_reg[1] / fifo_count;
accel_bias[2] = (int32_t)accel_bias_reg[2] / fifo_count;
}
4.3 运动数据分析与姿态估计
4.3.1 姿态估计算法原理
姿态估计通常需要融合多个传感器的数据。一个常见的方法是利用加速度计和陀螺仪数据,通过姿态估计算法(如卡尔曼滤波或Madgwick滤波)来计算设备的实时姿态。这些算法可以有效减少噪声和误差,提高姿态估计的准确性。
4.3.2 姿态数据在项目中的应用
MPU6050的姿态数据可以广泛应用于各种项目。例如,在机器人项目中,姿态数据可用于实现稳定行走或平衡;在游戏控制器中,姿态数据可用于追踪玩家动作;在运动健康监测设备中,姿态数据可用于分析用户的运动模式和姿势质量。以下是如何使用Madgwick滤波算法进行姿态估计的示例代码:
// 使用Madgwick算法进行姿态估计
void MadgwickAHRSupdateIMU(float gx, float gy, float gz, float ax, float ay, float az, float dt) {
float recipNorm;
float s0, s1, s2, s3;
float qDot1, qDot2, qDot3, qDot4;
float _2q0, _2q1, _2q2, _2q3, _4q0, _4q1, _4q2 ,_8q1, _8q2, q0q0, q1q1, q2q2, q3q3;
gx *= 0.5 * dt;
gy *= 0.5 * dt;
gz *= 0.5 * dt;
// 预先计算一些辅助变量
s0 = q[0];
s1 = q[1];
s2 = q[2];
s3 = q[3];
qDot1 = 0.5 * (-q[1] * gx - q[2] * gy - q[3] * gz);
qDot2 = 0.5 * (q[0] * gx + q[2] * gz - q[3] * gy);
qDot3 = 0.5 * (q[0] * gy - q[1] * gz + q[3] * gx);
qDot4 = 0.5 * (q[0] * gz + q[1] * gy - q[2] * gx);
// 计算Q的更新值
_2q0 = 2.0f * q[0];
_2q1 = 2.0f * q[1];
_2q2 = 2.0f * q[2];
_2q3 = 2.0f * q[3];
_4q0 = 4.0f * q[0];
_4q1 = 4.0f * q[1];
_4q2 = 4.0f * q[2];
_8q1 = 8.0f * q[1];
_8q2 = 8.0f * q[2];
q0q0 = q[0] * q[0];
q1q1 = q[1] * q[1];
q2q2 = q[2] * q[2];
q3q3 = q[3] * q[3];
recipNorm = invSqrt(q0q0 + q1q1 + q2q2 + q3q3);
qDot1 -= _4q0 * s1 + _4q2 * s3 - _4q3 * s2;
qDot2 -= _4q0 * s2 + _4q1 * s3 + _4q3 * s1;
qDot3 -= _4q0 * s3 - _4q1 * s2 + _4q2 * s1;
qDot4 -= _4q0 * s2 + _4q1 * s1 + _4q2 * s0;
recipNorm = invSqrt(qDot1 * qDot1 + qDot2 * qDot2 + qDot3 * qDot3 + qDot4 * qDot4);
qDot1 *= recipNorm;
qDot2 *= recipNorm;
qDot3 *= recipNorm;
qDot4 *= recipNorm;
// 更新四元数
q[0] += qDot1 * dt;
q[1] += qDot2 * dt;
q[2] += qDot3 * dt;
q[3] += qDot4 * dt;
norm = invSqrt(q[0] * q[0] + q[1] * q[1] + q[2] * q[2] + q[3] * q[3]);
q[0] *= norm;
q[1] *= norm;
q[2] *= norm;
q[3] *= norm;
}
// 辅助函数:计算向量的逆平方根
float invSqrt(float x) {
float halfx = 0.5f * x;
float y = x;
long i = *(long*)&y;
i = 0x5f3759df - (i >> 1);
y = *(float*)&i;
y = y * (1.5f - (halfx * y * y));
return y;
}
在上述代码中,使用Madgwick姿态估计算法根据陀螺仪和加速度计的测量值来实时更新四元数。这一四元数随后可转换为欧拉角,用于表示设备的方向和倾斜。在实际应用中,姿态数据的处理和应用需要结合具体的应用场景和硬件能力进行优化。
5. WIFI模块实现远程数据传输
5.1 WIFI模块工作原理与选型
5.1.1 WIFI通信技术概述
WIFI技术已经广泛应用于各种嵌入式设备中,为设备提供了便利的无线通信手段。WIFI的全称为Wireless Fidelity,它使用的是802.11系列协议标准,支持设备在局域网内进行无线数据传输。WIFI通信技术具有传输速度快、覆盖范围广、组网灵活等特点。
WIFI模块的主要工作流程包括:初始化、扫描网络、连接网络、数据传输等步骤。首先,设备初始化WIFI模块,然后进行网络扫描以发现可用的AP(Access Point)。在连接到网络之后,设备便可以利用IP协议进行数据的发送与接收。
5.1.2 模块选型与性能对比
在众多WIFI模块中,ESP8266与ESP32因其出色的性能和相对低廉的成本脱颖而出。ESP8266模块是一款单芯片内置TCP/IP协议的WIFI SoC,适合简单的无线应用。而ESP32模块则在ESP8266的基础上进行了升级,加入了蓝牙功能,提供了更多的GPIO接口,并且拥有更高的处理能力,支持多线程。
模块选型时,需要考虑以下几个因素:
- 成本 :根据项目的预算选择合适的模块。
- 接口 :检查模块与STM32F4的兼容性,确保能够通过SPI或UART等接口连接。
- 性能 :考虑CPU频率、内存大小、传输速率等参数。
- 功耗 :对于需要长时间运行的设备,功耗是一个重要因素。
- 外设 :是否需要其他外设功能,如蓝牙或摄像头等。
以下是性能对比表格:
| 特性/模块 | ESP8266 | ESP32 | |-----------|----------|---------| | CPU频率 | 80MHz | 最高240MHz | | 内存 | 32KB IRAM + 32KB/160KB ROM | 520KB SRAM + 4MB Flash | | 网络协议 | 802.11 b/g/n | 802.11 b/g/n + Bluetooth | | GPIO数量 | 约17个 | 约34个 | | 功耗 | 中等 | 相对较低 |
5.2 WIFI模块的配置与数据发送
5.2.1 网络协议栈配置
WIFI模块的网络协议栈配置是实现数据通信的基础。ESP8266/ESP32模块通常在出厂时已经预置了固件,提供了TCP/IP协议栈的支持。对于开发者来说,关键在于如何通过AT指令或使用SDK来配置网络参数。
使用AT指令配置网络连接的步骤大致如下:
- 初始化WIFI模块。
- 扫描可用的AP。
- 发送AT指令连接到指定的SSID和密码。
- 获取IP地址。
- 进行数据通信。
下面给出一个简单的AT指令配置网络的代码示例:
#include "esp8266.h"
void setup() {
// 初始化串口通信
Serial.begin(115200);
// 初始化ESP8266模块
WiFi.begin();
// 设置ESP8266为Station模式
WiFi.mode(WIFI_STA);
// 扫描可用网络
WiFi.scanNetworks();
// 连接到网络
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected.");
}
void loop() {
// 这里可以放置代码执行网络通信任务
}
5.2.2 数据封装与传输实现
在成功连接到网络之后,就可以进行数据的发送与接收了。数据封装是将要传输的数据按照网络协议的要求进行格式化,比如TCP/IP协议中,数据需要封装成IP数据包,然后再封装成TCP数据段进行传输。
下面是一个使用ESP8266模块进行HTTP请求的代码示例:
#include "ESP8266WiFi.h"
#include "ESP8266WebServer.h"
ESP8266WebServer server(80);
void setup() {
Serial.begin(115200);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected");
server.on("/", handleRoot); // 设置访问根目录的请求处理函数
server.begin(); // 启动服务器
}
void loop() {
server.handleClient(); // 处理客户端请求
}
void handleRoot() {
server.send(200, "text/html", "<h1>Hello, ESP8266!</h1>"); // 发送响应给客户端
}
这段代码创建了一个简单的Web服务器,当访问ESP8266的IP地址时,会返回一个包含“Hello, ESP8266!”的HTML页面。
5.3 远程控制与数据接收优化
5.3.1 远程控制策略与实现
远程控制是物联网设备中常见的功能之一。实现远程控制通常需要设备拥有固定的IP地址或通过域名解析,以便外部设备可以通过网络与之通信。ESP8266和ESP32模块都支持通过建立TCP/UDP连接来进行远程控制。
TCP连接提供了稳定的双向通信,适用于控制命令和状态响应的传输,而UDP则适合于对实时性要求高且对数据丢失容忍度较高的应用。在实现远程控制时,一般需要服务器和设备端同时运行相应的服务程序。
下面是一个简单的TCP服务器和客户端的示例:
服务器端代码示例:
#include <ESP8266WiFi.h>
#include <WiFiServer.h>
WiFiServer server(80);
void setup() {
// 初始化串口和WiFi连接
Serial.begin(115200);
WiFi.begin(ssid, password);
server.begin();
Serial.println("Server started");
}
void loop() {
WiFiClient client = server.available();
if (client) {
String request = client.readStringUntil('\r');
Serial.println(request);
client.println("HTTP/1.1 200 OK");
client.println("Content-type:text/html");
client.println("");
client.println("<!DOCTYPE HTML>");
client.println("<html>");
client.println("Hello from ESP8266 TCP Server");
client.println("</html>");
delay(1);
Serial.println("Client disconnected");
client.stop();
}
}
客户端代码示例:
#include <ESP8266WiFi.h>
const char* ssid = "yourSSID";
const char* password = "yourPASSWORD";
void setup() {
Serial.begin(115200);
WiFi.begin(ssid, password);
Serial.println("Connecting to WiFi");
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("Connected to WiFi");
}
void loop() {
WiFiClient client;
Serial.println("Connecting to server...");
if (client.connect("***", 80)) {
Serial.println("Connected to server");
client.println("GET / HTTP/1.1");
client.println("Host: ***");
client.println("Connection: close");
client.println();
}
while (client.connected()) {
String line = client.readStringUntil('\n');
Serial.print(line);
}
Serial.println();
Serial.println("Disconnected from server");
delay(10000);
}
5.3.2 数据接收效率提升与异常处理
数据接收效率是决定远程数据传输性能的关键因素之一。要提高数据接收效率,首先需要确保网络连接稳定可靠,其次是优化数据处理逻辑。对于ESP8266/ESP32模块来说,可以采取以下措施:
- 使用DMA(Direct Memory Access)技术,减少CPU在数据传输过程中的干预,提高数据接收速度。
- 合理设置TCP窗口大小,以适应网络条件变化。
- 使用事件驱动的编程模式,减少轮询,提高数据接收的响应性。
异常处理是远程数据传输中不可忽视的一部分。在数据通信过程中,可能会因为网络问题、硬件故障等原因导致数据丢失、接收中断等问题。因此,需要编写健壮的异常处理代码来确保系统稳定运行。
异常处理通常包括:
- 网络断开的检测与重连策略。
- 接收缓冲区溢出的检测与处理。
- 通信超时的处理。
综上所述,通过对WIFI模块的选型、网络协议栈配置、数据传输优化以及远程控制策略的深入理解与应用,可以实现STM32F4项目中高效稳定的远程数据传输功能。在这一过程中,注意代码的模块化设计和异常处理机制的建立,可以显著提升系统的可靠性与用户体验。
6. SPI通信协议应用
6.1 SPI通信协议基础
SPI协议特点与应用场景
SPI(Serial Peripheral Interface)是一种高速的、全双工、同步的通信总线,主要用于微控制器与各种外围设备之间的通信。在嵌入式系统设计中,SPI协议凭借其高效、简单的特性,被广泛应用于多种场景中,如传感器数据采集、存储器接口、无线通信模块等。
SPI的特点包括: - 高速数据传输能力,通常速率可达数MHz; - 全双工通信,支持同时发送和接收数据; - 硬件实现简单,通常只需四个信号线(MOSI, MISO, SCK, CS); - 支持多设备通信,仅需通过不同的片选信号区分不同的设备; - 硬件流控制,不存在缓冲区溢出问题。
在STM32F4这类微控制器中,SPI协议通常用于与低速外围设备通信,例如与SD卡、外部ADC、DAC模块、传感器等进行数据交换。
SPI在项目中的角色与优势
在嵌入式项目中,选择SPI协议通常基于以下优势: - 性能 :与其他串行通信协议相比,SPI在短距离通信中提供更高的数据传输速率。 - 简单性 :协议简单,实现容易,占用微控制器的I/O资源较少。 - 灵活性 :支持多设备通信,便于扩展多个外设。 - 同步性 :提供时钟信号,保证数据的同步发送和接收。
然而,SPI协议也有其局限性,例如不适合远距离通信,且当连接多个设备时,需要较多的片选控制线。
6.2 SPI接口的配置与优化
接口配置步骤与注意要点
配置SPI接口的基本步骤包括: 1. 初始化GPIO引脚:配置SPI的SCK、MISO、MOSI和CS引脚为复用推挽输出。 2. 配置SPI参数:包括通信速率、数据大小、极性和相位等。 3. 启动SPI:使能SPI接口,开始数据通信。 4. 数据交互:通过软件或DMA方式发送和接收数据。 5. 关闭SPI:任务完成后关闭SPI接口,释放资源。
在进行SPI配置时,需要注意以下要点: - 时钟极性和相位 :根据外围设备的要求正确设置SPI的时钟极性和相位。 - 数据大小 :确保SPI主机和从机数据大小一致。 - 中断优先级 :如果使用中断方式处理数据,设置合适的优先级。 - DMA支持 :对于高速数据传输,使用DMA可以减轻CPU负担。
高效通信策略与性能优化
为了实现SPI通信的高效和性能优化,可以采取以下策略: - 数据缓冲 :使用DMA进行数据传输,减少CPU的介入。 - 中断服务 :合理配置中断,确保及时处理数据传输的事件。 - 速率匹配 :调整SPI速率以匹配外围设备的最佳工作状态。 - 软件管理 :对于不支持DMA的设备,通过软件优化循环和逻辑减少延迟。
代码示例:
// SPI 初始化配置
void SPI_Config(void) {
SPI_InitTypeDef SPI_InitStructure;
// SPI1 Periph clock enable
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);
// SPI1 configuration
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_16;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPI1, &SPI_InitStructure);
// SPI1 enable
SPI_Cmd(SPI1, ENABLE);
}
逻辑分析:上述代码主要完成SPI1的初始化配置。首先启用SPI1的时钟,然后进行一系列的结构体设置,包括定义传输方向、模式、数据位大小等参数,并最终启用SPI接口。这里的 SPI_Init 函数负责设置通信速率、数据格式等参数,这些参数都直接关系到SPI通信的性能。
参数说明: SPI_BaudRatePrescaler_16 表明我们使用16分频来设置SPI的时钟速率,确保与外围设备的速率相匹配。
6.3 SPI设备驱动开发与集成
设备驱动开发流程
开发SPI设备驱动通常需要遵循以下步骤: 1. 初始化 :配置SPI接口,包括引脚、时钟、协议等参数。 2. 片选管理 :管理片选信号,确保在通信时选中正确的设备。 3. 数据传输 :实现数据发送和接收的功能,可能包括同步或异步方式。 4. 设备控制 :执行设备特定的命令,如读写寄存器等。 5. 资源释放 :关闭SPI接口,释放占用的资源。
设备驱动与系统集成要点
在集成SPI设备驱动至系统时,需关注以下要点: - 设备抽象 :提供设备抽象层,使上层应用不必关心底层硬件细节。 - 错误处理 :合理处理通信错误,避免死锁和资源泄露。 - 模块化设计 :驱动模块化可以提高代码的可维护性和可重用性。 - 兼容性测试 :确保驱动能在不同配置的系统上正常工作。
代码示例:
// SPI 读取设备函数
uint8_t SPI_ReadDevice(SPI_TypeDef* SPIx, uint16_t DeviceAddress, uint8_t* pBuf, uint16_t Size) {
uint8_t i = 0;
uint16_t temp = 0;
// 1. 使能CS
GPIO_ResetBits(GPIOx, GPIO_Pin_x); // 使能片选
// 2. 发送读取命令
SPI_I2S_SendData(SPIx, DeviceAddress);
// 3. 等待数据发送完成
while(SPI_I2S_GetFlagStatus(SPIx, SPI_I2S_FLAG_TXE) == RESET);
// 4. 接收数据
for (i = 0; i < Size; i++) {
while(SPI_I2S_GetFlagStatus(SPIx, SPI_I2S_FLAG_RXNE) == RESET); // 等待接收到数据
temp = SPI_I2S_ReceiveData(SPIx); // 读取接收到的数据
if (pBuf != NULL) {
*(pBuf + i) = (uint8_t)(temp & 0x00FF); // 数据处理
}
}
// 5. 禁用CS
GPIO_SetBits(GPIOx, GPIO_Pin_x); // 禁用片选
// 6. 返回数据长度
return Size;
}
逻辑分析:此函数演示了如何使用SPI从设备中读取数据。它包括使能片选信号、发送读取命令、等待数据发送完成、接收数据和禁用片选信号。整个过程中,通过等待SPI标志位来确保数据传输的正确性。
参数说明: SPI_TypeDef* SPIx 表示SPI接口的指针, uint16_t DeviceAddress 是被访问设备的地址, uint8_t* pBuf 是指向数据缓冲区的指针, uint16_t Size 是要读取的数据长度。函数返回实际读取的数据长度。
表格: | 函数参数 | 描述 | | -------------- | ------------------------------------- | | SPI_TypeDef | SPI接口指针,指定使用哪一个SPI接口 | | uint16_t DeviceAddress | 被访问设备的地址 | | uint8_t pBuf | 指向数据缓冲区的指针,用于存储接收到的数据 | | uint16_t Size | 要读取的数据长度 |
代码逻辑的逐行解读分析
在逐行解读代码逻辑时,我们需要关注每一个步骤的目的和实现的细节:
// 片选信号使能
GPIO_ResetBits(GPIOx, GPIO_Pin_x);
- 此代码行通过GPIO的低电平来使能片选信号,表示SPI通信即将开始,且是针对特定设备的。
// 发送读取命令
SPI_I2S_SendData(SPIx, DeviceAddress);
DeviceAddress代表设备地址或特定寄存器地址,通过SPI发送,准备接收或发送数据。
// 等待数据发送完成
while(SPI_I2S_GetFlagStatus(SPIx, SPI_I2S_FLAG_TXE) == RESET);
- 这段代码确保所有待发送数据都已经被发送到总线上,避免数据遗漏。
// 接收数据
for (i = 0; i < Size; i++) {
while(SPI_I2S_GetFlagStatus(SPIx, SPI_I2S_FLAG_RXNE) == RESET);
temp = SPI_I2S_ReceiveData(SPIx);
if (pBuf != NULL) {
*(pBuf + i) = (uint8_t)(temp & 0x00FF);
}
}
- 循环中,代码通过
SPI_I2S_ReceiveData函数接收数据,每次接收一个字节。若指针pBuf不为空,将接收到的数据存储到缓冲区中。
// 禁用片选信号
GPIO_SetBits(GPIOx, GPIO_Pin_x);
- 通信结束后,代码行通过设置GPIO引脚为高电平来禁用片选信号。
通过上述代码逻辑和解读,我们可以看到完整的数据读取过程,确保了SPI通信的准确性和可靠性。
7. 系统代码实现与开发心得
7.1 系统代码结构与模块化设计
7.1.1 系统架构代码的逻辑分层
在嵌入式系统的设计中,代码结构和模块化设计是保证系统稳定性和可维护性的关键。STM32F4的系统架构代码通常被逻辑分为硬件抽象层(HAL)、中间件层和应用层。
-
硬件抽象层(HAL) :负责与硬件相关的低级操作,提供硬件接口的统一调用方式。HAL层是通过STM32的HAL库来实现的,主要负责设备驱动层面的初始化和控制。
-
中间件层 :它处于HAL层和应用层之间,实现一些通用的功能模块,如通信协议栈、数据处理等。中间件层可以复用性强,能够处理一些共性的任务。
-
应用层 :这一层是整个嵌入式系统的顶层,它包含业务逻辑,根据项目需求来编写特定功能的代码。
系统代码结构的分层设计有助于隔离各层次之间的依赖,便于测试和维护。在编写代码时,每一层都应该尽量独立于其它层次,以确保代码的可维护性和可扩展性。
7.1.2 模块间通信与数据流处理
模块间通信是嵌入式系统稳定运行的关键。在STM32F4项目中,通常采用如下方法实现模块间的通信和数据流处理:
-
回调函数 :中间件层或硬件抽象层可以提供回调机制,应用层在初始化时注册回调函数,当某些事件发生时,低层通过回调函数通知应用层。
-
信号量与消息队列 :在FreeRTOS等实时操作系统环境中,信号量和消息队列是常见的进程间通信方法。它们可以实现线程或任务间的同步和异步通信。
-
全局变量与静态数据结构 :虽然通常不推荐使用全局变量,但在某些情况下,利用全局变量进行模块间数据传递是一种简单高效的方法。
数据流处理需要考虑数据的采集、存储、处理和传输。系统设计时应预设数据流的处理路径,保证数据在各个模块间流动的顺畅与高效。
// 示例:回调函数的使用场景
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) {
if (htim->Instance == TIM2) {
// 定时器2溢出,执行相关数据采集任务
}
}
7.2 关键功能的代码实现细节
7.2.1 关键功能的代码逻辑与优化
实现一个功能模块的代码时,首先需要定义清晰的逻辑结构。关键功能的代码实现通常需要考虑性能优化、内存管理、异常处理等因素。
-
性能优化 :通过算法优化、减少不必要的数据复制、使用DMA(直接内存访问)等方式提升代码效率。
-
内存管理 :合理分配和释放内存,避免内存泄漏和碎片化,可以使用静态分配、内存池等策略。
-
异常处理 :在代码中加入错误检测和处理机制,对异常情况进行记录和响应,确保系统稳定运行。
// 示例:异常处理机制
if (check_sensor_data_error(data)) {
// 处理错误数据
handle_error(data);
} else {
// 正常数据处理
process_data(data);
}
7.2.2 调试过程中的问题定位与解决
调试是开发过程中不可或缺的环节。问题定位通常需要结合经验、日志分析和调试工具进行。
-
日志输出 :合理的日志输出能够快速定位问题出现的时间点和范围。
-
断言 :使用断言检查代码中的逻辑错误,能够提前发现问题所在。
-
调试工具 :如Keil5提供的调试器,可以单步执行、设置断点、查看内存和寄存器等。
// 示例:断言的使用
assert(data != NULL && "data should not be NULL!");
7.3 开发心得与项目总结
7.3.1 开发过程中的经验分享
经过一个完整的嵌入式项目开发周期,开发者可以累积许多宝贵的经验:
-
版本控制 :使用Git等版本控制系统来管理代码,合理利用分支和标签。
-
模块化开发 :遵循模块化设计原则,可以大幅提高开发效率和代码质量。
-
代码审查 :定期进行代码审查,有助于提升代码的可读性和可维护性。
7.3.2 项目完成后的总结与展望
项目完成后,对项目的整体回顾和总结是提升个人和团队能力的重要途径:
-
技术总结 :回顾项目中所使用的技术和解决方案,评价其优缺点。
-
流程反思 :评估项目管理和开发流程的有效性,找出改进点。
-
未来展望 :结合当前技术发展趋势,规划未来的开发方向和技术深化。
开发心得和项目总结是个人成长的宝贵财富,它们帮助开发者不断进步,为未来挑战做好准备。
简介:本项目以STM32F4微控制器为基础,应用Keil5开发环境设计了一个高级嵌入式系统。系统整合了七个超声波传感器用于全方位距离检测,利用MPU6050进行运动和倾斜感应,通过WIFI模块实现远程数据传输,并使用SPI通信协议连接外部设备。项目文件还包含开发心得与代码实现细节,涵盖了多种技术的综合应用,具有重要的学习和应用价值。

技术共进,成长同行——讯飞AI开发者社区
更多推荐

 16
16 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)