
一起玩儿物联网人工智能小车——07. 麦克纳姆轮简介及其安装方法
本文将介绍麦克纳姆轮的基本知识、运动方式和安装中的注意事项
可能很多人还没有听说过麦克纳姆轮,但是自从1973年,它被瑞典的麦克纳姆公司研发出来之后,在运输、仓储以及现代物流业中得到了广泛的应用。
麦克纳姆轮的主要特点是,在不借助复杂的转向机构的情况下,可以方便的实现车身的前、后、右等各个方向的平移和旋转,特别适用于对车体位置需要精确控制的场景以及狭小空间的应用场景。
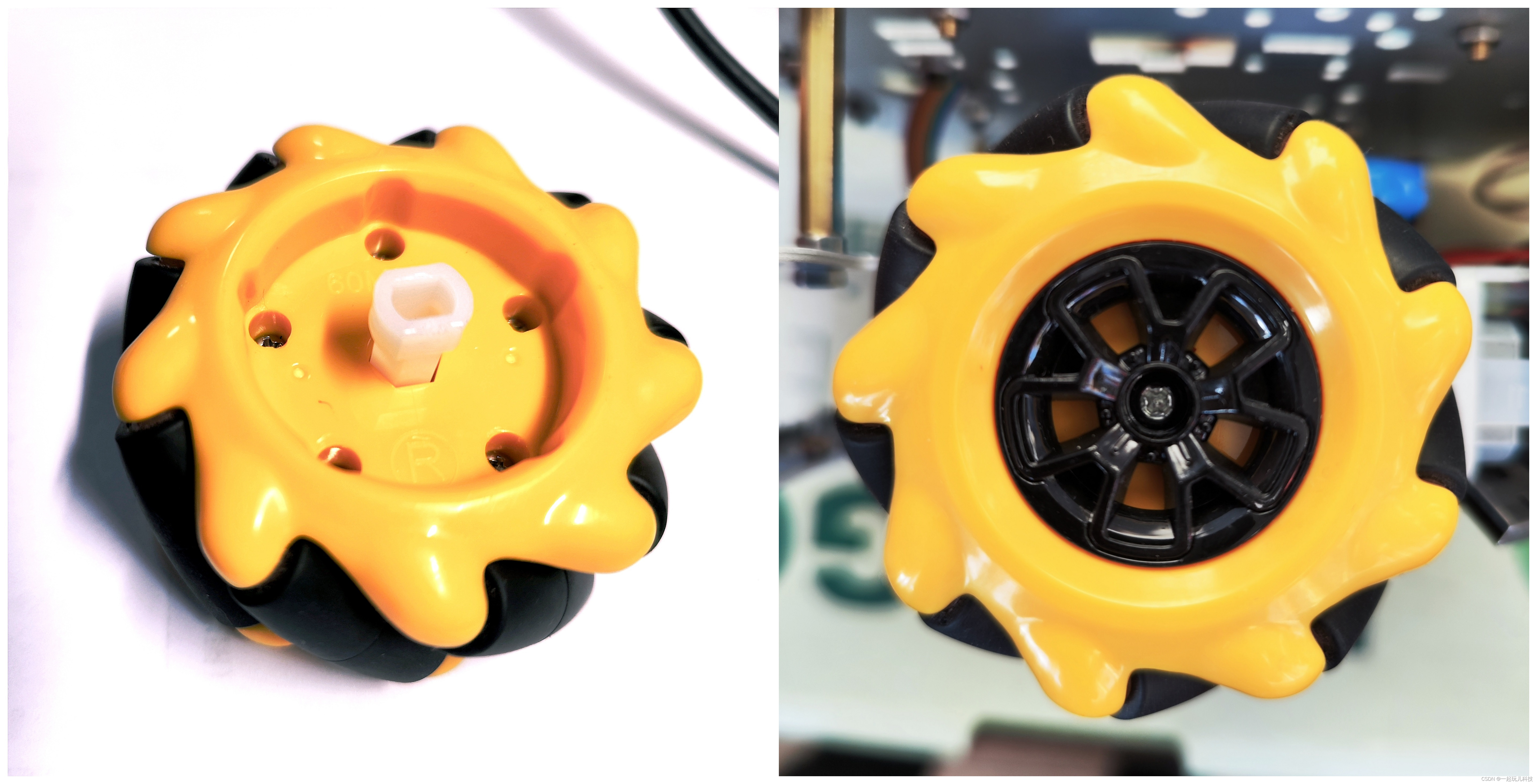
装有麦克纳姆轮的车辆之所以具有全向平移和原地旋转的功能,主要是由其独特的结构所决定的。下面就是我们这次智能小车使用到的麦克纳姆轮。

从上图可以看出,麦克纳姆轮和我们传统的轮子是不一样的,从侧面看上去轮子的外轮廓也是圆形的,但其圆形的表面是由一系列倾斜安装的黑色辊子所形成的,这些辊子是中间粗,两端细。每一个辊子的轴线与整个轮子的轴线有45度的夹角。这样设计的结果就是轮子在转动的过程中,由于轮子和辊子在同时旋转,因此受到地面的摩擦力的方向并不是向正前方的。这时有人就会问了,那4个这样的轮子装在一起,也只能斜着走啊?确实是这样的,如果同样的4个轮子装在一起,还是达不到任意方向平移和原地旋转的目的的。麦克纳姆轮的另一个巧妙之处就在于它是有两种轮子的,一种是辊子的轴线与轮子轴线的左侧夹角为45度,一种是辊子的轴线与轮子轴线的右侧夹角是45度,仔细看上图中左侧的两个轮子与右侧的两个轮子的黑色辊子的方向是不同的啊?为了区分这两种麦克纳姆轮,在轮子的内部分别由“L”和“R”的字样(有些制造商也会标注“A”和“B”来进行区分)。
在使用麦克纳姆轮的时候,通常“L”轮和“R”轮要成对使用,并且安装在同一轴线上。这样,同一个轴上的两个轮子在超同一方向等速旋转的时候,就会出现横向的力相互抵消,车辆可以向前或者向后正向行使了。而当两个轮子的转速相同而方向相反的时候,则会出现前后向摩擦力相互抵消,只剩下侧向摩擦力,这样车体就可以横向行使了。这样,通过控制不同轮子的转速和转向的不同,就可以实现车体向任意方向平移或者原地转圈了。这也就引出了另一个需要注意的地方,在使用麦克纳姆轮的时候,每个轮子都要有驱动力,没有驱动力的麦克纳姆轮是不会产生任何横向摩擦力的,只能任由车体的摆布。
根据“L”和“R”两个车轮必须要安装在同一个车轴上,对于四轮车来说,也会有两种安装的方法。依据轮子上辊子的方向不同,可以形成X形安装和O形安装。如下图所示。
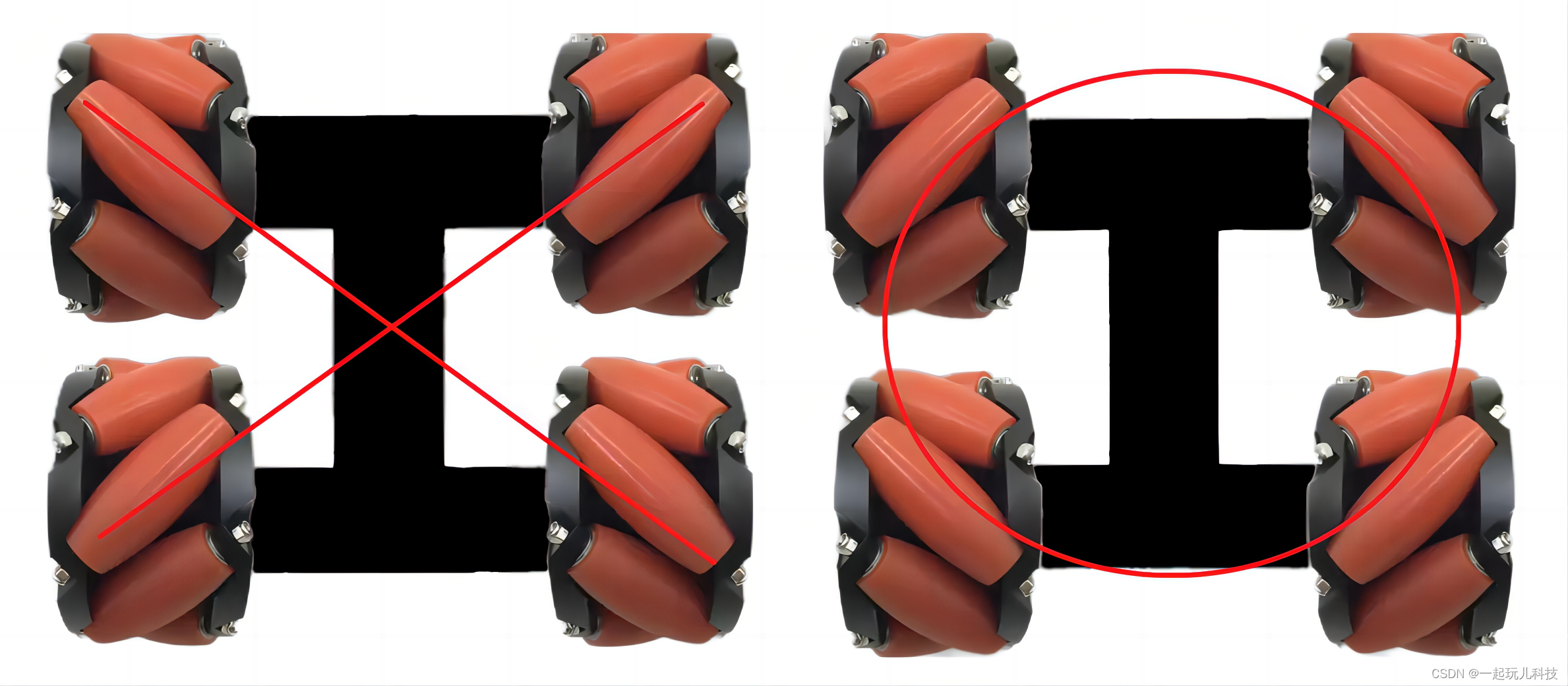
至于那种形式更合理,则取决于车身的形状。等到将来小车制作完成了,大家可以两种安装方法都尝试一下,看看其中有啥区别。
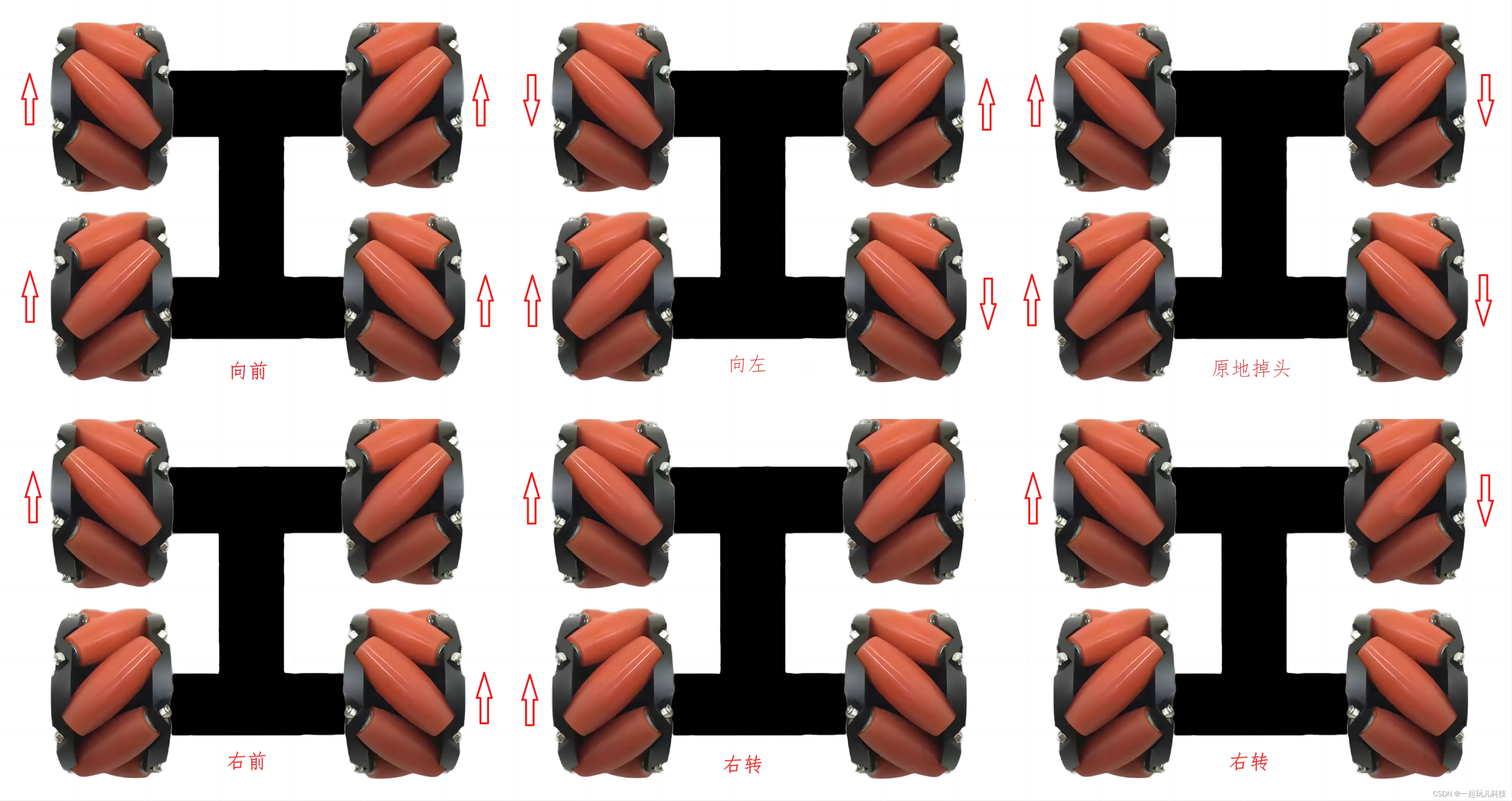
利用麦克纳姆轮的受力特性,通过不同转动方向和转动速率的配合,就可以使得真个车体受到的合力指向不同的方向,这样车体就可以向合力的方向移动了,而不需要改变车轮自身的方向。
下图列举了几种典型的通过控制麦克纳姆轮旋转的方向,实现车体向前和向右侧的运动情况。其他方向的运动可以通过改变轮子的转动方向或者改变转动的轮子来实现。这些都是我们在后边要通过编程的方法来实现的智能小车的运动方式。
下面就来把麦克纳姆轮装到我们的小车上吧!这种底盘的小车,如果使用普通的轮子,因为TT电机的输出轴与轮子的安装孔是形状一样且大小匹配的,直接插上就可以了。而麦克纳姆轮的中心孔径是六边形的,与TT电机的输出轴不匹配,就需要使用到一个白色的轴套,将轴套插入麦克纳姆轮中,然后再将TT电机插入到轴套中,最后从轮子外侧的中心孔,拧入一个M2的螺栓,这样就将轮子固定到TT电机的输出轴上了。如下图所示。
安装这个轮子螺丝的时候,要特别注意力度,不要用力过大,因为另一端的电机输出轴是塑料的,如果力度过大,很容易造成滑扣和脱扣。只要用手晃的时候,感觉到轮子已经和电机输出轴结合形成一体了,没有间隙了就可以了。
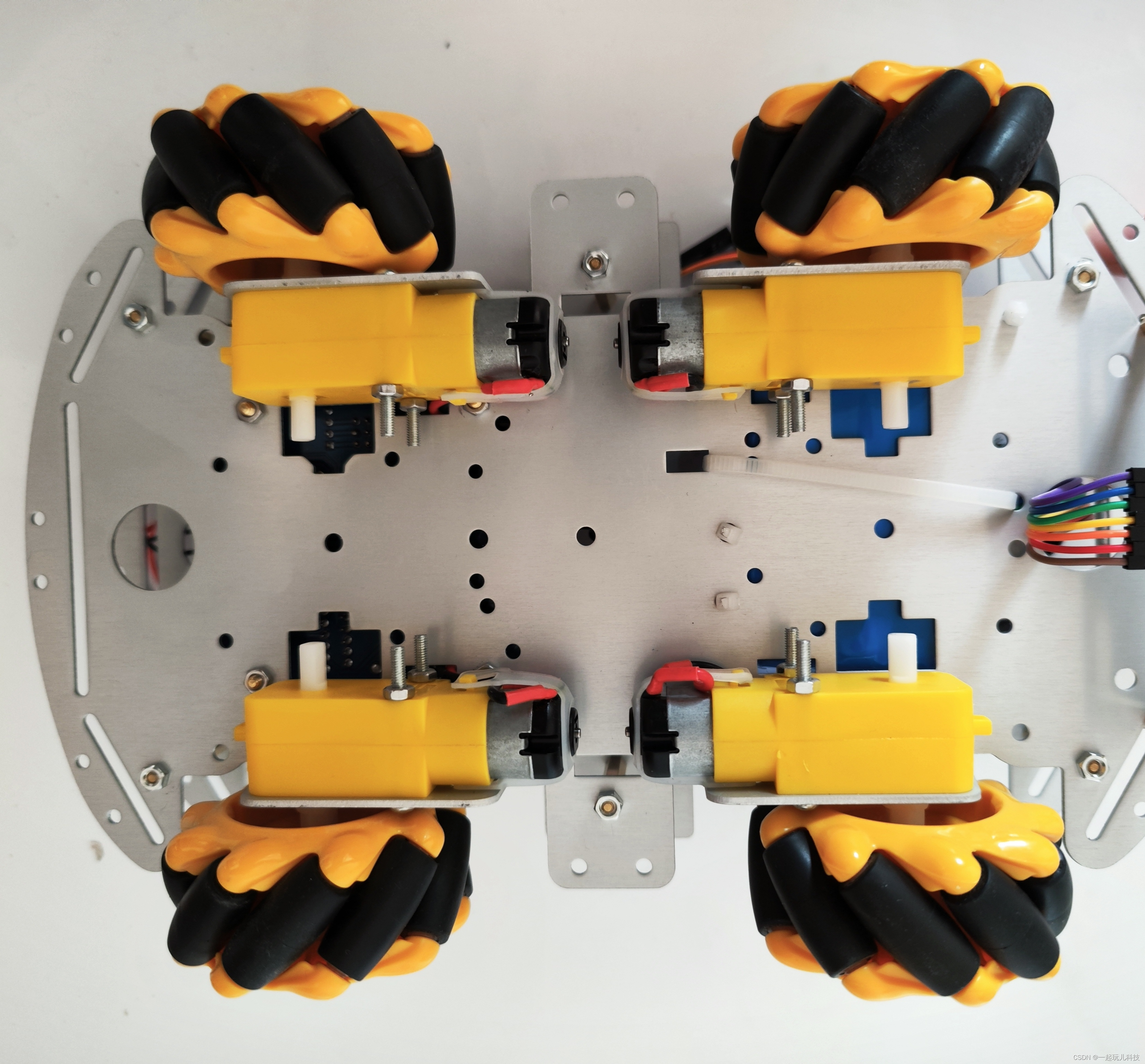
整个小车安装好后的样子如下图所示。
好了,小车的车轮就安装完成了。接下来,会讲解开发软件Mixly(米思齐)的安装和基本的使用方法。

技术共进,成长同行——讯飞AI开发者社区
更多推荐

 18
18 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)