
【传感器】JY61P
该产品是基于MEMS技术的高性能三维运动姿态测量系统。它包含三轴陀螺仪、三轴加速度计。
·
简介
该产品是基于MEMS技术的高性能三维运动姿态测量系统。它包含三轴陀螺仪、三轴加速度计。
资料链接
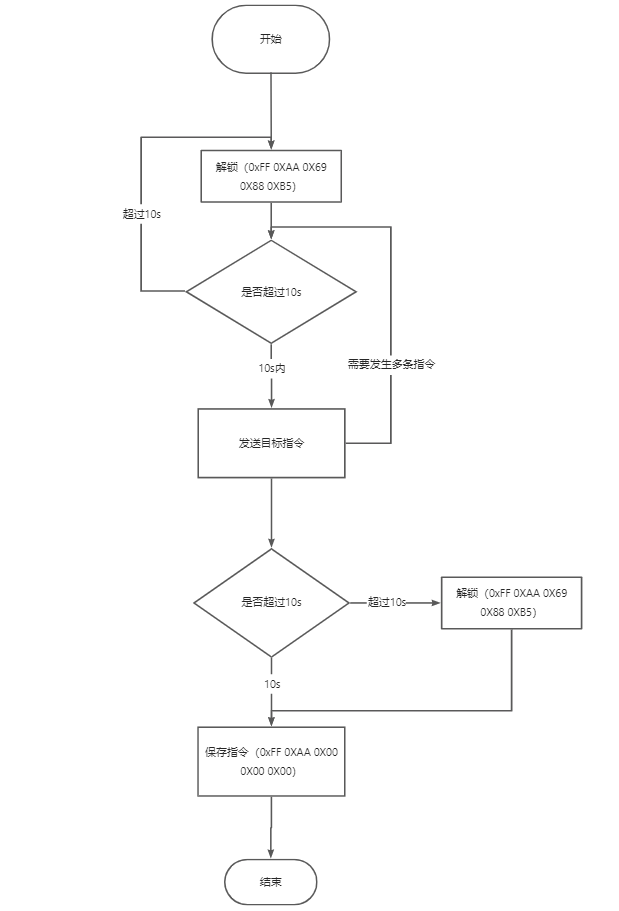
协议写格式
写寄存器的步骤是:
- 解锁
- 写寄存器
- 保存
【注】:不保存的话断电重启就无效了
串口协议转IIC格式
串口是先读/发低位,IIC是先读/发高位
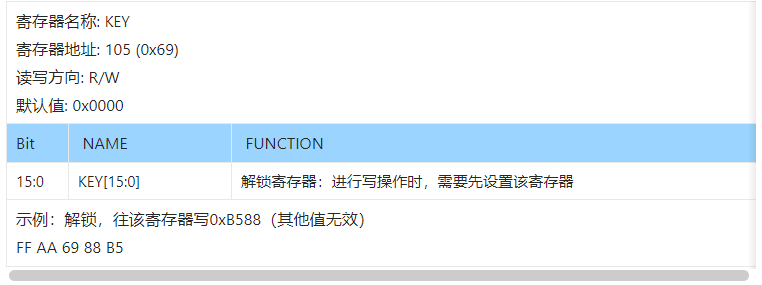
示例:0xB588 ——> CMD_UNLOCK[2] = {0X88,0XB5}
陀螺仪安装方向配置
- 水平放置,方向没有影响
- 垂直放置,只能如下图所示摆放
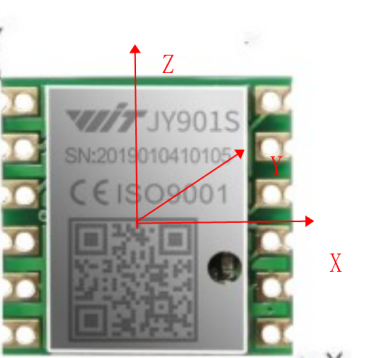
陀螺仪默认水平放置,垂直放置需要配置寄存器,配置方法如下
static unsigned char CMD_ORIENT[2] = {0X01,0X00}; //设置垂直安装
static unsigned char CMD_UNLOCK[2] = {0X88,0XB5}; //解锁指令
static unsigned char CMD_SAVE[2] = {0X00,0X00}; //保存指令
void gyro_orient_config(){
i2c_write(&hi2cx,0x50<<1,0x69,CMD_UNLOCK,2,I2C_TIMEOUT); //解锁
i2c_write(&hi2cx,0x50<<1,0x23,CMD_ORIENT,2,I2C_TIMEOUT); //竖直放置
i2c_write(&hi2cx,0x50<<1,0x00,CMD_SAVE,2,I2C_TIMEOUT); //保存配置
}
技术共进,成长同行——讯飞AI开发者社区
更多推荐


 19
19 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)