
【论文解读|滑坡检测·U-Net·语义分割· 深度学习·遥感·中分辨率影像】基于双编码器 U-Net 的滑坡检测方法:融合 Sentinel-2 影像与 DEM 数据(四)
【论文解读|滑坡检测·U-Net·语义分割· 深度学习·遥感·中分辨率影像】基于双编码器 U-Net 的滑坡检测方法:融合 Sentinel-2 影像与 DEM 数据(四)
【论文解读|滑坡检测·U-Net·语义分割· 深度学习·遥感·中分辨率影像】基于双编码器 U-Net 的滑坡检测方法:融合 Sentinel-2 影像与 DEM 数据(四)
【论文解读|滑坡检测·U-Net·语义分割· 深度学习·遥感·中分辨率影像】基于双编码器 U-Net 的滑坡检测方法:融合 Sentinel-2 影像与 DEM 数据(四)
文章目录
欢迎铁子们点赞、关注、收藏!
祝大家逢考必过!逢投必中!上岸上岸上岸!upupup
大多数高校硕博生毕业要求需要参加学术会议,发表EI或者SCI检索的学术论文会议论文。详细信息可关注VX “
学术会议小灵通”或参考学术信息专栏:https://blog.csdn.net/2401_89898861/article/details/145551342
论文地址:DOI 10.1007/s10346-023-02089-5
3 方法:数据预处理
3.3 模型构建
3.3.1 双编码路径与特征融合
- 在深度语义分割网络中,编码器(encoder)主要由 卷积层(convolutional layers)、激活函数(activation functions) 和 池化层(pooling layers) 组成。
- 卷积层通过线性卷积运算提取深层特征,并通过 ReLU(Rectified Linear Unit) 等非线性激活函数生成特征图(feature maps)。
- 卷积核(convolution kernels)的参数可训练,并通过 反向传播(backpropagation) 进行自适应优化。
- 池化层用于降采样(down-sampling) 以提取高级特征并降低计算复杂度,常见方法包括最大池化(max pooling) 和平均池化(average pooling)。
1. 双编码器架构(Dual-Encoder Architecture)
编码路径(encoding path)由 主编码器(master encoder) 和 辅助编码器(companion encoder) 组成:
- 主编码器 由 4 个编码块(encoder blocks)组成,第一个编码块包含 两层卷积层,后续 3 个编码块均包含 一层池化层和两层卷积层。
- 辅助编码器 由 3 个编码块组成,前两个编码块均包含 两层卷积层和一层池化层,第三个编码块仅包含 两层卷积层。
Sentinel-2 的 光学波段 作为主编码器的输入,DEM 数据 作为辅助编码器的输入,利用最大池化(max pooling)聚合卷积层提取的深度信息。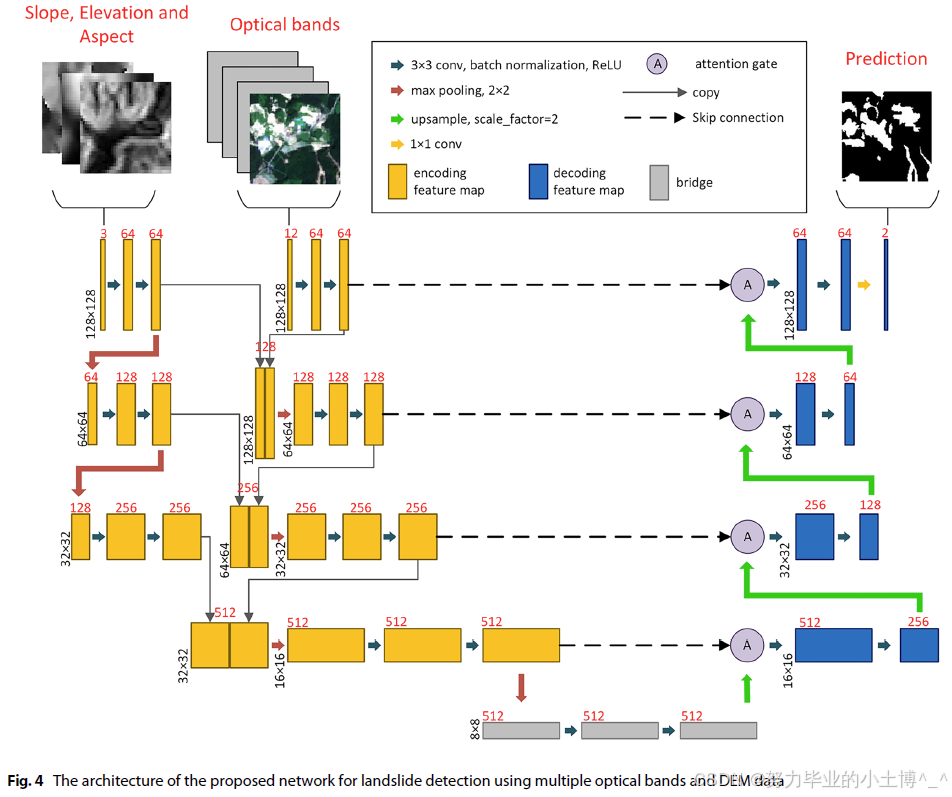
2. 分层特征融合(Layer-Wise Feature Fusion)
为了增强网络的特征表达能力与一致性,两个编码器提取的特征逐层融合:
- 在每个编码阶段,主编码器与辅助编码器对应编码块的特征图(feature maps)进行拼接(concatenation),并输入到主编码器的下一编码块。
- 该特征融合策略能够有效提升模型的判别能力。
主编码器数据流中的特征图生成过程由 公式(1) 进一步描述。
- 设 δ δ δ 和 ϑ ϑ ϑ 分别表示 主编码器(master encoder) 和 辅助编码器(companion encoder), l l l
为编码块的序号, m m m 代表特征图尺寸, d ( l ) d(l) d(l) 为第 l l l 层输出特征图的通道数。 - H δ , l ∈ R m × m × d ( l ) H_{δ,l}∈R^{m×m×d(l)} Hδ,l∈Rm×m×d(l)是主编码器第 l l l个编码器块更新的输出特征映射图;
- H δ , l − 1 ∈ R 2 m × 2 m × d ( l − 1 ) H_{δ,l-1}∈R^{2m×2m×d(l-1)} Hδ,l−1∈R2m×2m×d(l−1)是主编码器第 l − 1 l-1 l−1个编码器块更新的输出特征图 ;
- H ϑ , l − 1 ∈ R 2 m × 2 m × d ( l − 1 ) H_{ϑ,l-1}∈R^{2m×2m×d(l-1)} Hϑ,l−1∈R2m×2m×d(l−1)是辅助编码器第 l − 1 l-1 l−1个编码器块更新的输出特征图 ;
- W δ , 1 ∈ R d ( l ) × 2 d ( l − 1 ) W_{δ,1}∈R^{d(l)×2d(l-1)} Wδ,1∈Rd(l)×2d(l−1)和 W δ , 2 ∈ R d ( l ) × d ( l ) W_{δ,2}∈R^{d(l)×d(l)} Wδ,2∈Rd(l)×d(l)为可训练参数矩阵。
- BN 代表 批量归一化(batch normalization),
- σ ( ⋅ ) σ(⋅) σ(⋅) 为 激活函数(activation function), M a x P o o l 2 × 2 ( ⋅ ) MaxPool2×2(⋅) MaxPool2×2(⋅) 代表 2×2 最大池化(max pooling) 操作。
辅助编码器中编码块的特征图计算公式如下:

- H ϑ , l ∈ R m × m × d ( l ) H_{ϑ,l}∈R^{m×m×d(l)} Hϑ,l∈Rm×m×d(l)是输出特征图;
- H ϑ , l − 1 ∈ R 2 m × 2 m × d ( l − 1 ) H_{ϑ,l-1}∈R^{2m×2m×d(l-1)} Hϑ,l−1∈R2m×2m×d(l−1)是输入特征图 ;
- W ϑ , 1 ∈ R d ( l ) × 2 d ( l − 1 ) W_{ϑ,1}∈R^{d(l)×2d(l-1)} Wϑ,1∈Rd(l)×2d(l−1)和 W ϑ , 2 ∈ R d ( l ) × d ( l ) W_{ϑ,2}∈R^{d(l)×d(l)} Wϑ,2∈Rd(l)×d(l)表示编码器块的卷积层的可训练参数矩阵。
除了主编码器(master encoder)和辅助编码器(companion encoder)外,编码路径与解码路径之间通过 桥接模块(bridge) 连接,该模块包含 最大池化层(max pooling layer)、两层卷积(convolutional layers) 和 上采样层(up-sample layer)。
下节请参考:【论文解读|滑坡检测·U-Net·语义分割· 深度学习·遥感·中分辨率影像】基于双编码器 U-Net 的滑坡检测方法:融合 Sentinel-2 影像与 DEM 数据(五)
欢迎铁子们点赞、关注、收藏!
祝大家逢考必过!逢投必中!上岸上岸上岸!upupup
大多数高校硕博生毕业要求需要参加学术会议,发表EI或者SCI检索的学术论文会议论文。详细信息可关注VX “
学术会议小灵通”或参考学术信息专栏:https://blog.csdn.net/2401_89898861/article/details/145551342

技术共进,成长同行——讯飞AI开发者社区
更多推荐



 22
22 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)