
自动驾驶和机器人行业如何实现传感器时间同步(GPS IMU 相机 激光雷达)
自动驾驶和机器人行业如何实现传感器时间同步(GPS IMU 相机 激光雷达)
·
驾驶领域,如何实现激光雷达和相机的时间同步呢?
https://www.zhihu.com/question/363919550
PTP\gPTP时间同步原理
同步过程使用IEEE 1588v2.0 PTP的Delay request-response机制(two steps),slave端和master时钟设备进行ptp时间同步。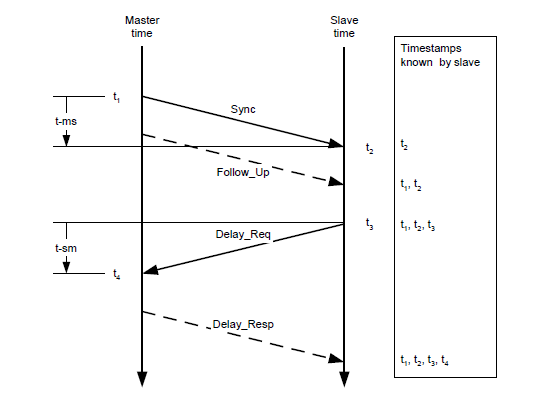
master和slave时钟通过Sync、Follow_Up、Delay_Req、Delay_Resp这几个数据包的交互,得到t1、t2、t3、t4时间,通过如下计算得到传输路径延迟和两时钟的偏移:
传输路径延时:Delay = [(t4 – t1) – (t3 – t2)]/2
时间偏移:Offset = (t2 - t1) - Delay = [(t2 – t1) + (t3 – t4)]/2
GPS时间同步原理
一条是时间周期为1s的同步脉冲信号PPS,脉冲宽度5ms~100ms;一条是通过标准串口输出GPRMC标准的时间同步报文。同步脉冲前沿时刻与GPRMC报文的发送在同一时刻,误差为ns级别,误差可以忽略。GPRMC是一条包含UTC时间(精确到秒),经纬度定位数据的标准格式报文。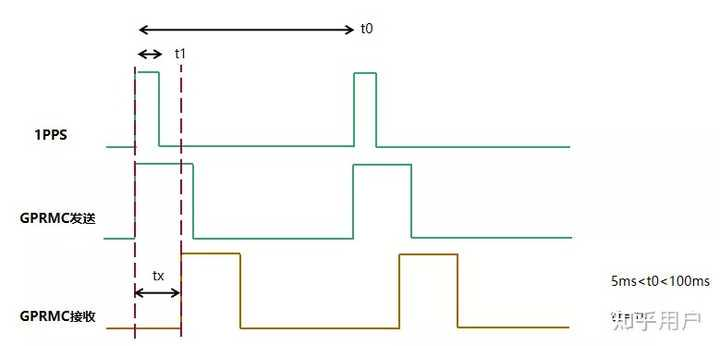
PPS秒脉冲为物理电平输出,接收及处理PPS信号的时间在ns级别,依旧可以忽略。但GPRMC数据一般通过波特率9600的串口发送,发送、接收、处理时间tx在ms级别,是时间同步的关键。以下是使用PPS+GPRMC进行时间同步的原理。
- 设备收到PPS秒脉冲信号后,将内部以晶振为时钟源的系统时间里的毫秒及以下时间清零,并由此开始计算毫秒时间。
2.当收到GPRMC数据后,提取报文里的时、分、秒、年、月、日UTC时间。
3.将收到秒脉冲到解析出GPRMC中UTC时间所用的时间tx,与UTC整秒时间相加,同步给系统时间,至此已完成一次时间同步。下一秒再进行相同的过程,每秒准确校准一次。

技术共进,成长同行——讯飞AI开发者社区
更多推荐
 6
6 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)