
【机器学习基础】第十八课:支持向量机之核函数
【机器学习基础】系列博客为参考周志华老师的《机器学习》一书,自己所做的读书笔记。
【机器学习基础】系列博客为参考周志华老师的《机器学习》一书,自己所做的读书笔记。
1.核函数
在之前的博客中,我们假设训练样本是线性可分的,即存在一个划分超平面能将训练样本正确分类。然而在现实任务中,原始样本空间内也许并不存在一个能正确划分两类样本的超平面。例如下图中的“异或”问题就不是线性可分的:
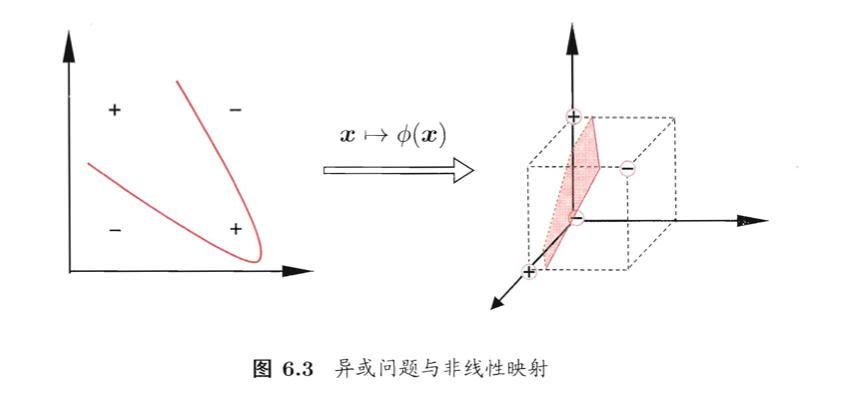
对这样的问题,可将样本从原始空间映射到一个更高维的特征空间,使得样本在这个特征空间内线性可分。例如在上图中,若将原始的二维空间映射到一个合适的三维空间,就能找到一个合适的划分超平面。⚠️幸运的是,如果原始空间是有限维,即属性数有限,那么一定存在一个高维特征空间使样本可分。
令 ϕ ( x ) \phi (\mathbf x) ϕ(x)表示将 x \mathbf x x映射后的特征向量,于是,在特征空间中划分超平面所对应的模型可表示为:
f ( x ) = w T ϕ ( x ) + b (1) f(\mathbf x)=\mathbf w ^T \phi (\mathbf x)+b \tag{1} f(x)=wTϕ(x)+b(1)
其中 w , b \mathbf w,b w,b是模型参数,类似【机器学习基础】第十六课:支持向量机之间隔与支持向量中学到的SVM的基本型,有:

其对偶问题是:

求解式(3)涉及到计算 ϕ ( x i ) T ϕ ( x j ) \phi (\mathbf x_i)^T \phi (\mathbf x_j) ϕ(xi)Tϕ(xj),这是样本 x i \mathbf x_i xi与 x j \mathbf x_j xj映射到特征空间之后的内积。由于特征空间维数可能很高,甚至可能是无穷维,因此直接计算 ϕ ( x i ) T ϕ ( x j ) \phi (\mathbf x_i)^T \phi (\mathbf x_j) ϕ(xi)Tϕ(xj)通常是困难的。为了避开这个障碍,可以设想这样一个函数:
κ ( x i , x j ) = < ϕ ( x i ) T , ϕ ( x j ) > = ϕ ( x i ) T ϕ ( x j ) (4) \kappa (\mathbf x_i,\mathbf x_j)=<\phi (\mathbf x_i)^T,\phi (\mathbf x_j)>=\phi (\mathbf x_i)^T \phi (\mathbf x_j) \tag{4} κ(xi,xj)=<ϕ(xi)T,ϕ(xj)>=ϕ(xi)Tϕ(xj)(4)
即 x i \mathbf x_i xi与 x j \mathbf x_j xj在特征空间的内积等于它们在原始样本空间中通过函数 κ ( ⋅ , ⋅ ) \kappa (\cdot,\cdot) κ(⋅,⋅)计算的结果。有了这样的函数,我们就不必直接去计算高维甚至无穷维特征空间中的内积,于是式(3)可重写为:

求解后即可得到:
f ( x ) = w T ϕ ( x ) + b = ∑ i = 1 m α i y i ϕ ( x i ) T ϕ ( x ) + b = ∑ i = 1 m α i y i κ ( x , x i ) + b (6) \begin{align} f(\mathbf x) & = \mathbf w^T \phi(\mathbf x) +b \\ & = \sum_{i=1}^m \alpha_i y_i \phi (\mathbf x_i)^T \phi (\mathbf x) + b \\ & = \sum_{i=1}^m \alpha_i y_i \kappa (\mathbf x, \mathbf x_i) + b \end{align} \tag{6} f(x)=wTϕ(x)+b=i=1∑mαiyiϕ(xi)Tϕ(x)+b=i=1∑mαiyiκ(x,xi)+b(6)
这里的函数 κ ( ⋅ , ⋅ ) \kappa(\cdot,\cdot) κ(⋅,⋅)就是 “核函数(kernel function)” 。式(6)显示出模型最优解可通过训练样本的核函数展开,这一展式亦称 “支持向量展式(support vector expansion)”。
显然,若已知合适映射 ϕ ( ⋅ ) \phi (\cdot) ϕ(⋅)的具体形式,则可写出核函数 κ ( ⋅ , ⋅ ) \kappa(\cdot,\cdot) κ(⋅,⋅)。但在现实任务中我们通常不知道 ϕ ( ⋅ ) \phi (\cdot) ϕ(⋅)是什么形式,那么,合适的核函数是否一定存在呢?什么样的函数能做核函数呢?我们有下面的定理:
核函数定理: 令 χ \chi χ为输入空间, κ ( ⋅ , ⋅ ) \kappa(\cdot,\cdot) κ(⋅,⋅)是定义在 χ × χ \chi \times \chi χ×χ上的对称函数,则 κ \kappa κ是核函数当且仅当对于任意数据 D = { x 1 , x 2 , . . . , x m } D=\{\mathbf x_1,\mathbf x_2,...,\mathbf x_m \} D={x1,x2,...,xm},“核矩阵”(kernel matrix) K K K 总是半正定的:
K = [ κ ( x 1 , x 1 ) ⋯ κ ( x 1 , x j ) ⋯ κ ( x 1 , x m ) ⋮ ⋱ ⋮ ⋱ ⋮ κ ( x i , x 1 ) ⋯ κ ( x i , x j ) ⋯ κ ( x i , x m ) ⋮ ⋱ ⋮ ⋱ ⋮ κ ( x m , x 1 ) ⋯ κ ( x m , x j ) ⋯ κ ( x m , x m ) ] \mathbf K = \begin{bmatrix} \kappa (\mathbf x_1,\mathbf x_1) & \cdots & \kappa (\mathbf x_1,\mathbf x_j) & \cdots & \kappa (\mathbf x_1,\mathbf x_m) \\ \vdots & \ddots & \vdots & \ddots & \vdots \\ \kappa (\mathbf x_i,\mathbf x_1) & \cdots & \kappa (\mathbf x_i,\mathbf x_j) & \cdots & \kappa (\mathbf x_i,\mathbf x_m) \\ \vdots & \ddots & \vdots & \ddots & \vdots \\ \kappa (\mathbf x_m,\mathbf x_1) & \cdots & \kappa (\mathbf x_m,\mathbf x_j) & \cdots & \kappa (\mathbf x_m,\mathbf x_m) \end{bmatrix} K= κ(x1,x1)⋮κ(xi,x1)⋮κ(xm,x1)⋯⋱⋯⋱⋯κ(x1,xj)⋮κ(xi,xj)⋮κ(xm,xj)⋯⋱⋯⋱⋯κ(x1,xm)⋮κ(xi,xm)⋮κ(xm,xm)
上述定理表明,只要一个对称函数所对应的核矩阵半正定,它就能作为核函数使用。事实上,对于一个半正定核矩阵,总能找到一个与之对应的映射 ϕ \phi ϕ。换言之,任何一个核函数都隐式地定义了一个称为 “再生核希尔伯特空间”(Reproducing Kernel Hilbert Space,简称RKHS) 的特征空间。
通过前面的讨论可知,我们希望样本在特征空间内线性可分,因此特征空间的好坏对支持向量机的性能至关重要。需注意的是,在不知道特征映射的形式时,我们并不知道什么样的核函数是合适的,而核函数也仅是隐式地定义了这个特征空间。
⚠️于是,“核函数选择”成为支持向量机的最大变数。若核函数选择不合适,则意味着将样本映射到了一个不合适的特征空间,很可能导致性能不佳。
这方面有一些基本的经验,例如对文本数据通常采用线性核,情况不明时可先尝试高斯核。
常用的核函数:

d = 1 d=1 d=1时退化为线性核,高斯核亦称RBF核。
此外,还可通过函数组合得到,例如:
👉若 κ 1 \kappa_1 κ1和 κ 2 \kappa_2 κ2为核函数,则对于任意正数 γ 1 , γ 2 \gamma_1,\gamma_2 γ1,γ2,其线性组合
γ 1 κ 1 + γ 2 κ 2 \gamma_1 \kappa_1 + \gamma_2 \kappa_2 γ1κ1+γ2κ2
也是核函数。
👉若 κ 1 \kappa_1 κ1和 κ 2 \kappa_2 κ2为核函数,则核函数的直积
κ 1 ⊗ κ 2 ( x , z ) = κ 1 ( x , z ) κ 2 ( x , z ) \kappa_1 \otimes \kappa_2 (\mathbf x,\mathbf z)=\kappa_1(\mathbf x,\mathbf z) \kappa_2 (\mathbf x,\mathbf z) κ1⊗κ2(x,z)=κ1(x,z)κ2(x,z)
也是核函数。
👉若 κ 1 \kappa_1 κ1为核函数,则对于任意函数 g ( x ) g(\mathbf x) g(x),
κ ( x , z ) = g ( x ) κ 1 ( x , z ) g ( z ) \kappa (\mathbf x,\mathbf z)=g(\mathbf x)\kappa_1 (\mathbf x,\mathbf z)g(\mathbf z) κ(x,z)=g(x)κ1(x,z)g(z)
也是核函数。
2.直积
“直积” 又称 “笛卡尔乘积”:表示为 X ⊗ Y X \otimes Y X⊗Y,第一个对象是 X X X的成员而第二个对象是 Y Y Y的所有可能有序对的其中一个成员。
例如, A = { a , b } , B = { 0 , 1 , 2 } A=\{a,b \},B=\{ 0,1,2 \} A={a,b},B={0,1,2},则:
A ⊗ B = { ( a , 0 ) , ( a , 1 ) , ( a , 2 ) , ( b , 0 ) , ( b , 1 ) , ( b , 2 ) } A \otimes B=\{(a, 0), (a, 1), (a, 2), (b, 0), (b, 1), (b, 2)\} A⊗B={(a,0),(a,1),(a,2),(b,0),(b,1),(b,2)}
B ⊗ A = { ( 0 , a ) , ( 0 , b ) , ( 1 , a ) , ( 1 , b ) , ( 2 , a ) , ( 2 , b ) } B \otimes A=\{(0, a), (0, b), (1, a), (1, b), (2, a), (2, b)\} B⊗A={(0,a),(0,b),(1,a),(1,b),(2,a),(2,b)}
想要获取最新文章推送或者私聊谈人生,请关注我的个人微信公众号:⬇️x-jeff的AI工坊⬇️
个人博客网站:https://shichaoxin.com
GitHub:https://github.com/x-jeff

技术共进,成长同行——讯飞AI开发者社区
更多推荐



 15
15 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)