
图像处理与计算机视觉:相机成像模型
给定N个点的世界坐标与像素坐标的对应关系,计算相机的内参和外参。,通过相机投影矩阵,将3D世界点转换为2D图像点(齐次坐标)如何求变换矩阵找特殊点在相机坐标中的表示。焦距、光心位置、像素分辨率、偏斜角。(2)根据消失点、消失线标定相机。焦距扩大2倍,光线变为四分之一。根据相似三角形,仅与焦距有关,平移、旋转,取决于外部参数,个未知数,至少需要6对匹配点。(1)坐标归一化的DLT将。->仿射变换Ma
·
七 相机成像模型
7.1 成像过程
焦距扩大2倍,光线变为四分之一
x=MX,通过相机投影矩阵,将3D世界点转换为2D图像点(齐次坐标)
整体流程:世界坐标->相机坐标->图像坐标->像素坐标
(1)世界坐标UVW->相机坐标XYZ(相机外部参数):相似变换
平移、旋转,取决于外部参数,Mext
如何求变换矩阵:找特殊点在相机坐标中的表示
- 原点(0,0,0,1)->平移
- U、V、W轴上单位距离的点在相机坐标中的表示->旋转,得到r1,r2,r3,当作列向量,排起来即可。

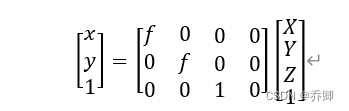
(2)相机坐标XYZ->像平面坐标xy(相机内部参数:焦距f):透视投影
根据相似三角形,仅与焦距有关,Mproj
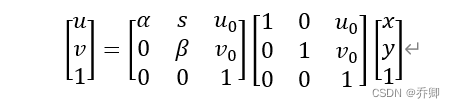
(3)像平面坐标->像素坐标uv(相机内部参数:平移、缩放、倾斜):仿射变换
光心位置:平移
像素分辨率:缩放
偏斜角:旋转
->仿射变换:Maff
(4)总的成像过程:
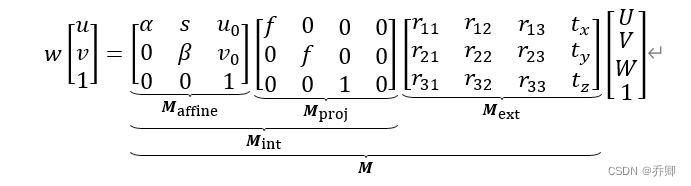
自由度:11
相机内参
焦距、光心位置、像素分辨率、偏斜角
7.2 相机标定
给定N个点的世界坐标与像素坐标的对应关系,计算相机的内参和外参
11个未知数,至少需要6对匹配点
(1)坐标归一化的DLT:将N个点的世界坐标变换其对应点的在图像中的像素坐标,二者相等建立关系:

- 归一化坐标:
- 计算一个相似变换,归一化图像坐标,平移到均值,到原点的平均距离为√2
- 计算另一个相似变换,归一化空间坐标,平移到均值,到原点的平均距离为√3
- Pm=0,对P奇异值分解,V的最后一列(最小特征值对应的特征向量)为m,从而在归一化后的坐标系中计算M~
- 反归一化
(2) 根据消失点、消失线标定相机
了解即可

技术共进,成长同行——讯飞AI开发者社区
更多推荐

 0
0 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)