
学习笔记14--环境感知传感器技术之毫米波雷达
本系列博客包括6个专栏,分别为:《自动驾驶技术概览》、《自动驾驶汽车平台技术基础》、《自动驾驶汽车定位技术》、《自动驾驶汽车环境感知》、《自动驾驶汽车决策与控制》、《自动驾驶系统设计及应用》,笔者不是自动驾驶领域的专家,只是一个在探索自动驾驶路上的小白,此系列丛书尚未阅读完,也是边阅读边总结边思考,欢迎各位小伙伴,各位大牛们在评论区给出建议,帮笔者这个小白挑出错误,谢谢!此专栏是关于《自动驾驶技术
·
本系列博客包括6个专栏,分别为:《自动驾驶技术概览》、《自动驾驶汽车平台技术基础》、《自动驾驶汽车定位技术》、《自动驾驶汽车环境感知》、《自动驾驶汽车决策与控制》、《自动驾驶系统设计及应用》,笔者不是自动驾驶领域的专家,只是一个在探索自动驾驶路上的小白,此系列丛书尚未阅读完,也是边阅读边总结边思考,欢迎各位小伙伴,各位大牛们在评论区给出建议,帮笔者这个小白挑出错误,谢谢!
此专栏是关于《自动驾驶技术概览》书籍的笔记。
2.环境感知传感器技术之毫米波雷达
2.1 毫米波基本介绍
- 毫米波定义:毫米波就是电磁波,雷达通过发射无线电信号并接收反射信号来测定车辆与物体间的距离,频率介于10~300GHz之间;
- 毫米波与其他传感器对比:
- 与厘米波导引头比较:毫米波导引头体积小、质量轻、空间分辨率高;
- 与红外、激光、电视等光学导引头比较:毫米波导引头穿透雾、烟、灰尘的能力强;
- 毫米波导引头的抗干扰性能优于其他微波导引头;
- 毫米波工作频率30~300GHz,波长1~10mm,介于厘米波与光波间,毫米波兼有微波制导和光电制导的优点;
- 毫米波雷达特点:
- 毫米波雷达可以检测30~100m远的物体,高性能毫米波雷达可以探测更远的物体;
- 毫米波雷达不受天气的影响,即使在最恶劣的天气和光照条件下也能正常工作,穿透烟雾能力很强;
- 毫米波雷达具有全天候、全天时的工作特性,且探测距离远、探测精度高,被广泛应用于车载距离探测,如:自适应巡航、碰撞预警、盲区探测、自动紧急制动等;
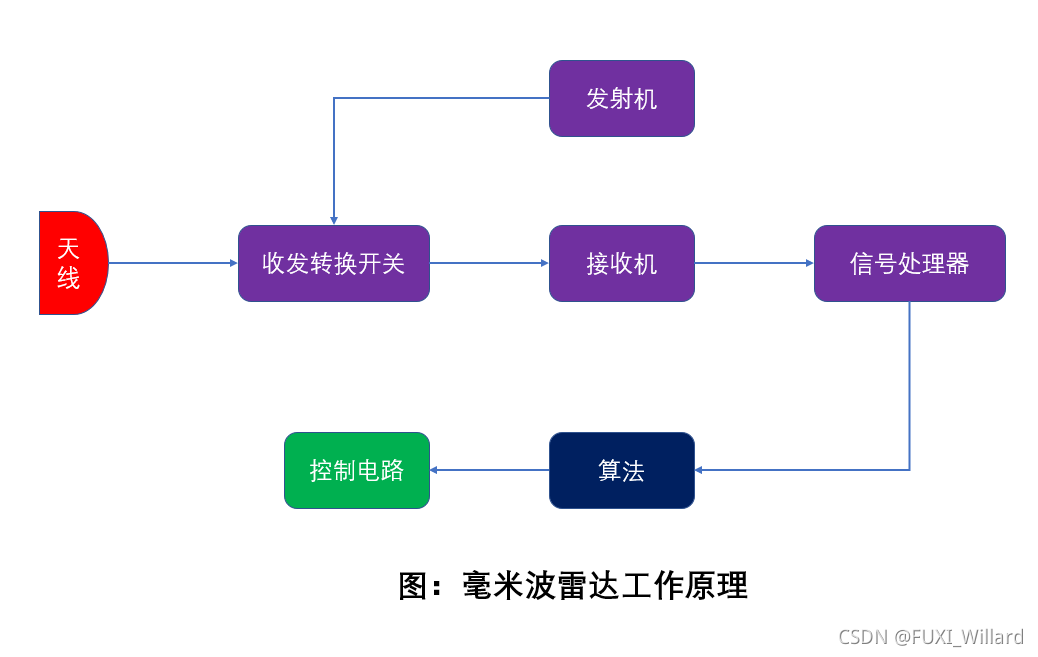
2.2 毫米波雷达工作原理
毫米波雷达测距、测速原理:基于多普勒效应,采集的原始数据基于极坐标系(距离、角度);
工作时,振荡器产生一个频率随时间逐渐增加的信号,信号遇到障碍物后,反射回来,时延为2倍的距离除以光速;返回的波形和发出的波形间有频率差,这个频率差呈线性关系:物体越远,返回的波收到得越晚,跟入射波频率差值越大;将两个频率做减法,可以得到两个频率的差拍频率,通过判断差拍频率的高低可以判断障碍物的距离。
自动驾驶领域毫米波雷达工作原理:
- 车载毫米波雷达通过天线发射毫米波,接收目标反射信号;
- 经后台处理后快速准确地获取汽车车身周围的物理环境信息,如:汽车与其他物体间的相对距离、相对速度、角度、运动方向等;
- 根据所探知的物体信息进行目标追踪和识别分类;
- 结合车身动态信息和其他传感器接收的信息进行数据融合,通过中央处理单元(ECU)进行智能处理;
- 经合理决策后,及时对汽车运动执行控制,实现自动驾驶。
2.3 毫米波特点及其他
- 和激光雷达比较:毫米波雷达精度低、可视范围角度偏小,一般需要多个雷达组合使用;
- 毫米波雷达传输的是不可见电磁波,无法检测上过漆的木头或塑料,行人的反射波较弱;
- 毫米波雷达对金属表面非常敏感,一个弯曲的金属表面会被误认为是一个面积很大的表面;
- 毫米波雷达在隧道里的效果不佳;
- 毫米波雷达可用频段:24GHz、60GHz、77GHz、79GHz;
- 毫米波雷达的主要问题:存在相互干扰的可能;频率不同的电磁波在传输过程中相互独立,频率相近的电磁波会相互叠加,使信号劣化;

技术共进,成长同行——讯飞AI开发者社区
更多推荐

 2
2 0
0- 0



 已为社区贡献25条内容
已为社区贡献25条内容

所有评论(0)