
自动驾驶中的传感器技术32——Lidar(7)
激光雷达(LiDAR)测角方案主要分为扫描式和非扫描式两类。扫描式包括机械式(如Velodyne的360°旋转扫描)、转镜式(如禾赛AT128的120°水平扫描)、MEMS振镜(如速腾M1的二维摆动扫描)以及转镜+振镜混合方案(如图达通猎鹰)。非扫描式主要为Flash LiDAR(如FT120),通过泛光照明实现瞬时全场景探测,但受限于功率和分辨率。此外,光学相控阵(OPA)利用相位控制实现固态扫
1、Lidar测角方案
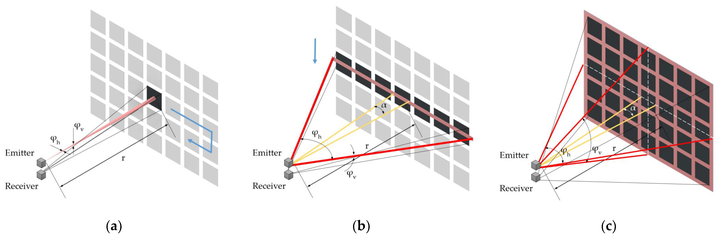
Lidar的测角等同于Lidar的Scanning方式。下图罗列了一部分的扫描方式
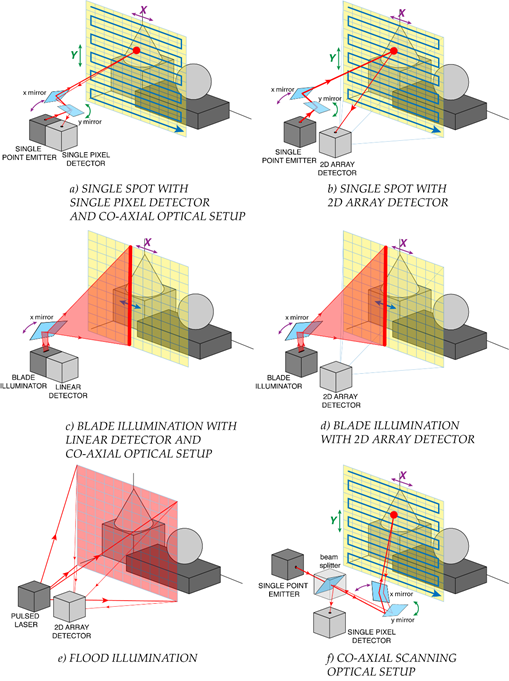
(a) 在同轴光学装置中使用单点和一个像素检测器进行二维光栅扫描,(速腾M1)
(b) 使用单点和二维阵列检测器进行二维光栅扫描,
(c) 在同轴光学装置中使用叶片光束和线性阵列检测器进行一维线扫描,(禾赛AT128)
(d) 使用叶片光束和二维阵列检测器进行一维线扫描,
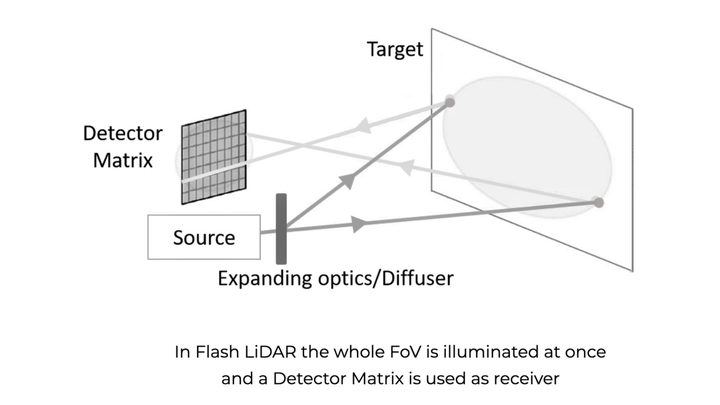
(e) Flash激光雷达的泛光照明和二维成像仪(全场景Flash采集)无扫描。
(f)同轴扫描光学设置示例。
可以看到,上图只是罗列了:
半固态Lidar (MEMS): 该方案使用微机电系统(MEMS)微振镜来替代宏观的旋转部件。MEMS振镜在一块微小的硅基芯片上集成了可高速摆动的镜面,通过电信号精确控制其偏转角度,从而实现激光束在二维方向上的扫描。这使得Lidar的体积、功耗和成本大幅降低,同时可靠性显著提升,被认为是当前车规级量产的主流路径之一 。
固态Lidar (Solid-state LiDAR)--Flash Lidar: 它属于非扫描式Lidar,类似于相机的闪光灯,一次性发射出一大片覆盖整个视场角的激光,然后利用一个感光探测器阵列(如SPAD阵列)同时接收不同位置返回的信号,瞬间获取整个场景的三维图像。Flash Lidar的优点是速度极快,但其探测距离和分辨率受限于激光发射功率和探测器阵列的规模。
此外还有:
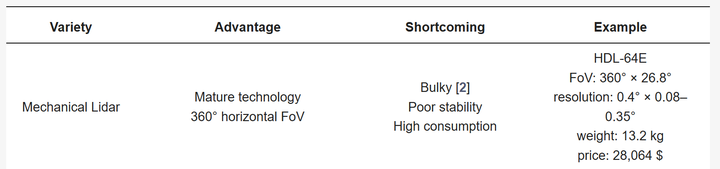
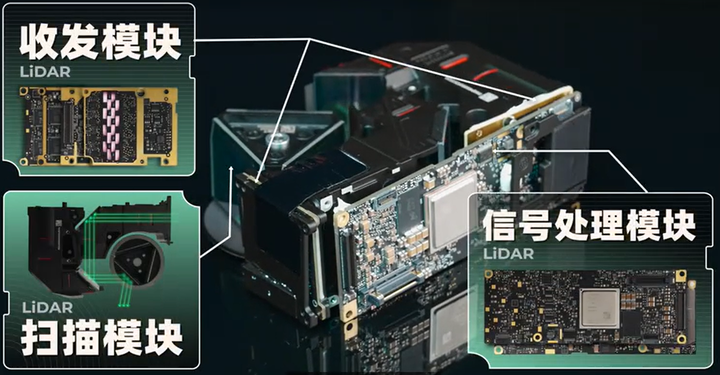
机械式Lidar: 这是技术最成熟的方案,依赖于电机驱动整个收发模块或内部的光学镜组进行高速旋转,实现360°的水平扫描。其优点是技术成熟、扫描范围广,但缺点也十分明显:体积大、重量重、功耗高,且旋转的机械部件使其可靠性较低,难以满足车规级要求 。
固态Lidar (Solid-state LiDAR)--光学相控阵(OPA): OPA借鉴了相控阵雷达的原理,通过控制一个微型天线阵列中各单元发射光波的相位差,来合成具有特定方向的主光束,从而实现无惯性的光束偏转和扫描。OPA方案具有体积小、重量轻、扫描速度快、可靠性极高的优点 。然而,其制造工艺极为复杂,对阵列单元尺寸(需小于半个波长)和加工精度要求极高,导致目前技术成熟度低,产业链尚不完善 。
可以将此节与自动驾驶中的传感器技术30——Lidar(5)结合起来,更能加深理解。
这里同时也给出Lidar的测距即Ranging方式,如下图所示,以便更好的去理解Lidar的工作方式
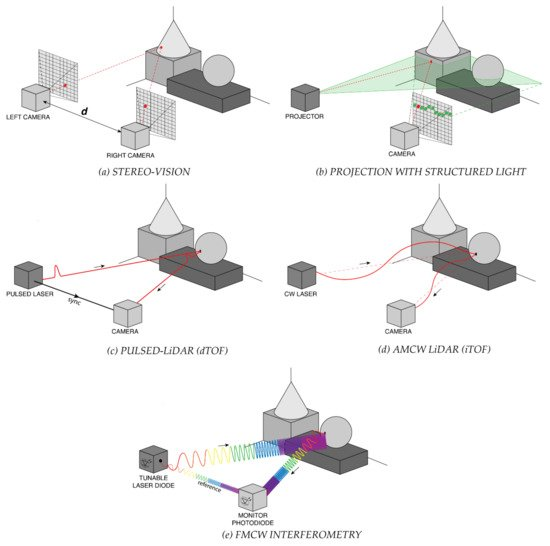
Ref:Light detection and ranging (LiDAR) | Encyclopedia MDPI
2、机械扫描测角方案
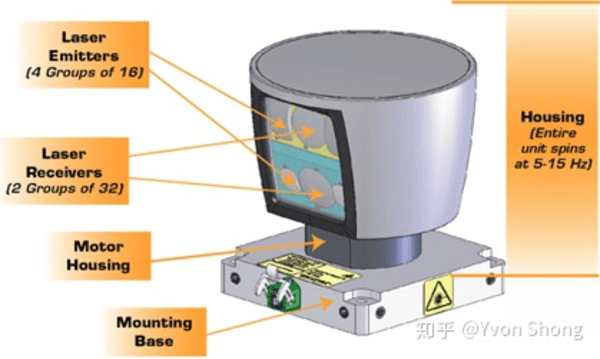
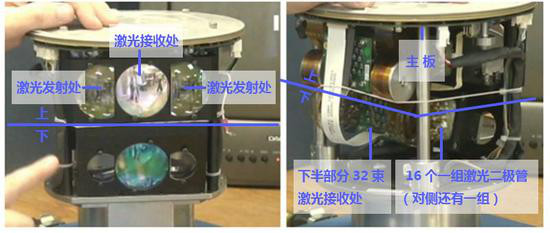
如上图所示,水平测角通过360°机械水平扫描,垂直测角通过64束激光发射器和64束激光接收器完成,将垂直FOV划分为64线,以此判断目标所在的垂直角度。技术指标如下
3、转镜扫描测角方案
这里比较经典的就是禾赛AT128,如图1(c)
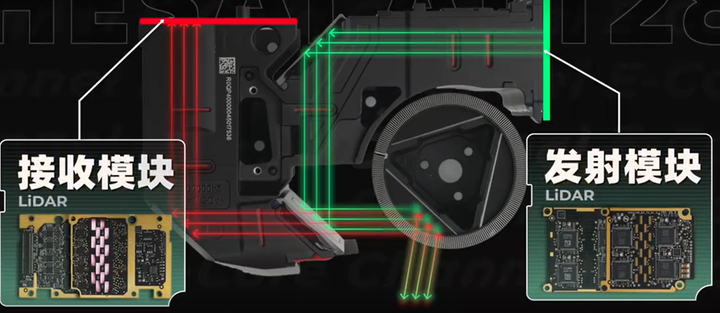
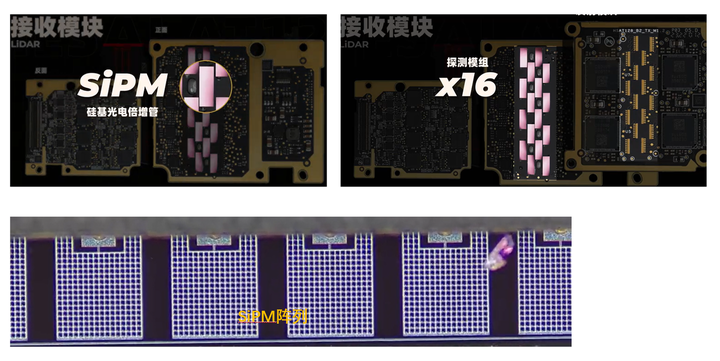
如上图所示,水平测角通过360°转镜水平扫描,但是由于视窗限制,只能覆盖前方120°,再配合转镜的转速,可以将水平120°实现1200等分,垂直测角通过128束激光发射器和128束激光接收器完成,将垂直FOV划分为128线,以此判断目标所在的垂直角度。技术指标如图10所示。

4、振镜扫描测角方案
这里比较经典的就是速腾M1,如图1(a)
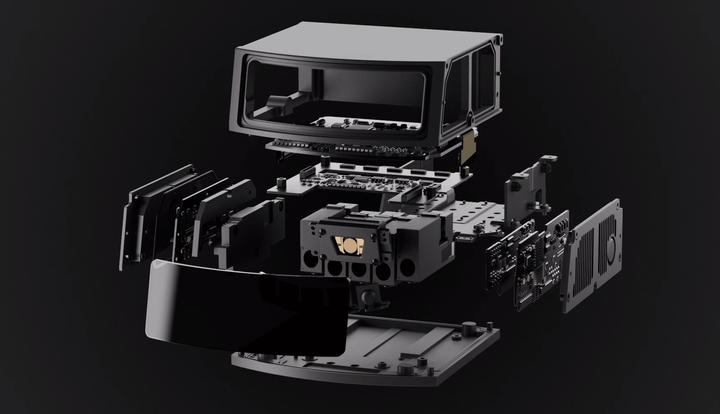
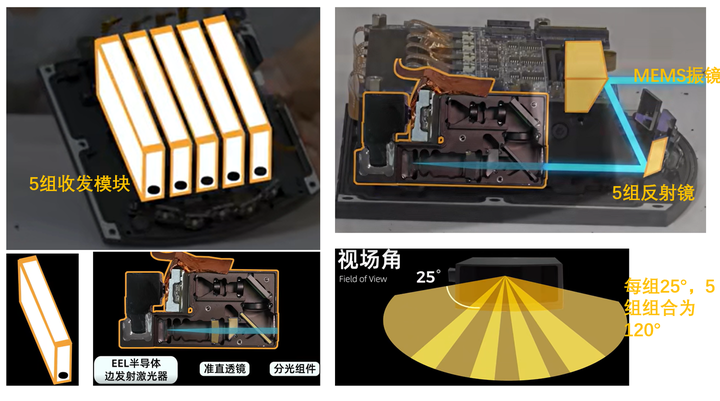
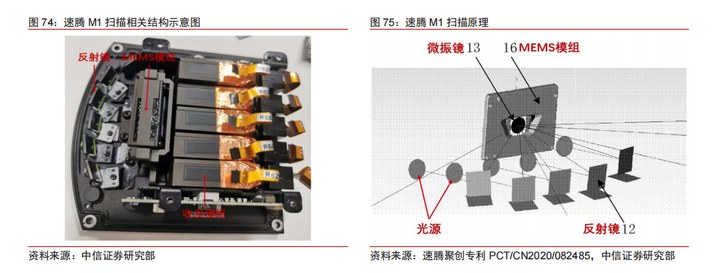
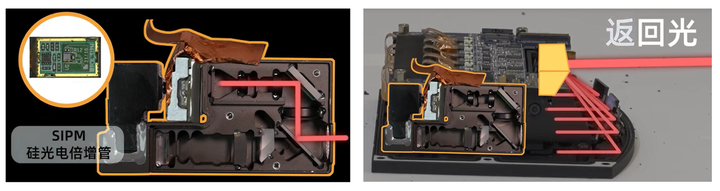

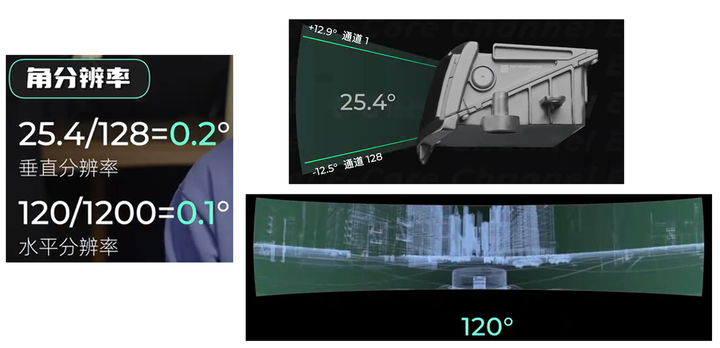
如上图所示,水平测角通过振镜垂直向的摆动,由于振镜垂直向摆动角度有限,所以用5组反射镜,进行拼接,实现水平120°的覆盖,垂直测角通过振镜垂直向的摆动完成,实现垂直向25°的覆盖。
M1的水平和垂直角分辨率均为0.2°,点频为每秒78.7万。垂直方案差不多等同于128线的AT128。
M1P:在M1基础上加入ROI功能,局部垂直分辨率可翻倍至0.1°,水平角分辨率0.2°,ROI模式下局部分辨率可达0.1°x0.1°,点频每秒78.7万。
5、转镜+振镜混合扫描测角方案
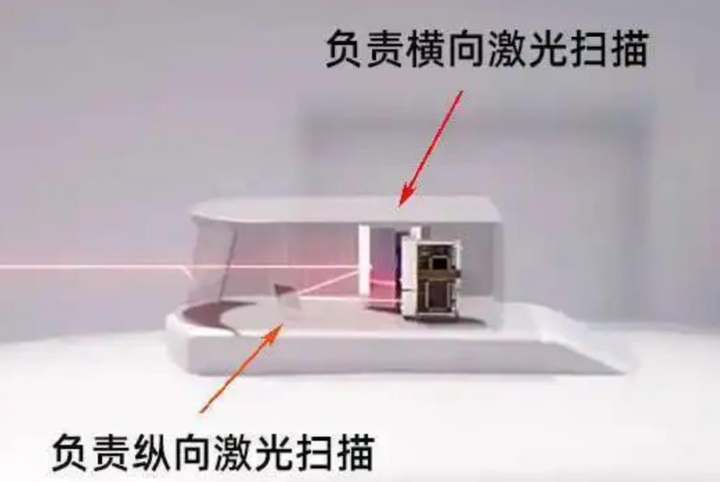
这里比较经典的就是图达通猎鹰

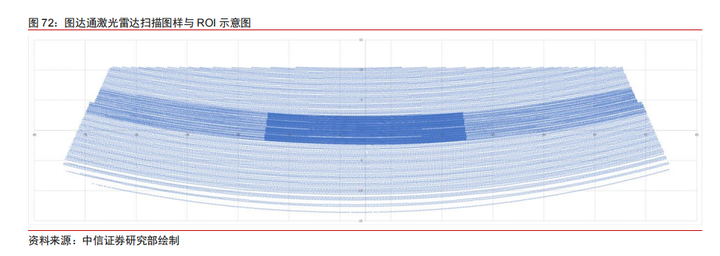
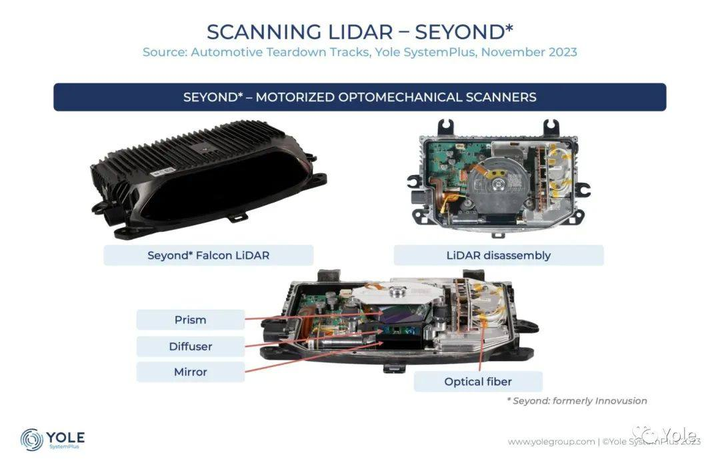
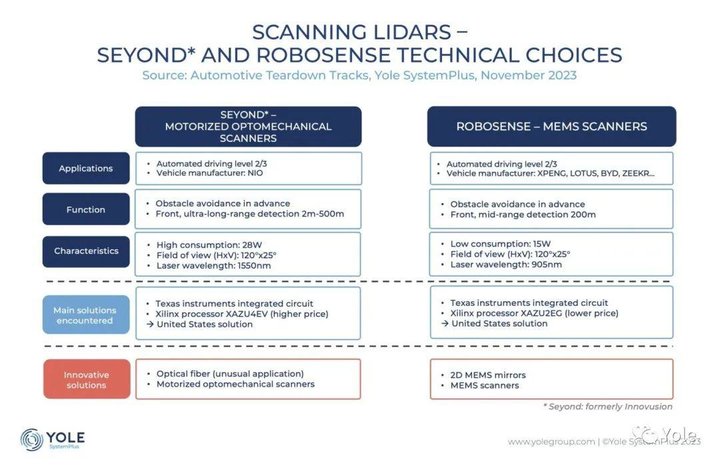
图达通采用了光纤激光器,点光源发射,通过MEMS振镜实现垂直扫描,通过转镜实现水平扫描。
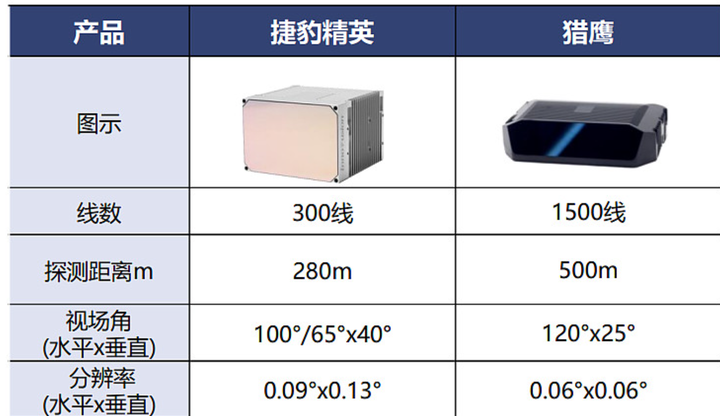
对以上技术指标有一定的存疑,振镜和转镜的扫描架构下,其指标水平大幅由于AT128,垂直大幅优于速腾M1。
6、Flash Lidar
以下为一款Flash Lidar参数
FT120是一款专为量产乘用车近距补盲打造的纯固态激光雷达,其其拥有 100° x 75° 超广角视场和零盲区的优势,最大量程为 100 米,既能够感知到高处的路牌、栏杆、立体车库夹层等,也可以探测到低矮的孩童、宠物、锥桶、斑马线等。192,000 点/秒的点频 (单回波模式下) 和 160 (H) x 120 (V) 的全局分辨率,让这款激光雷达能够探测到丰富的物体细节,实时掌握周边环境信息。

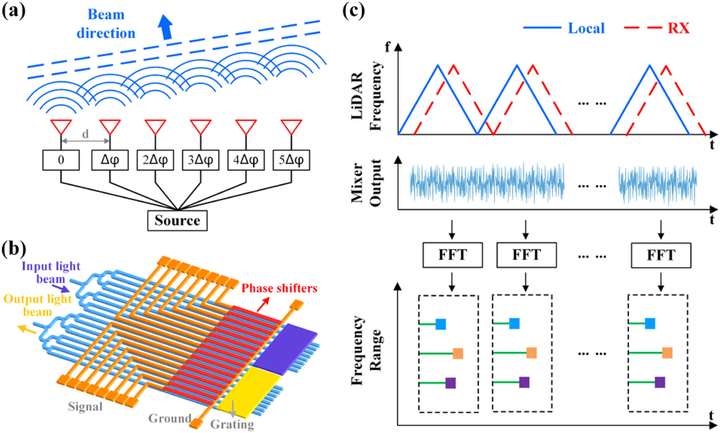
7、固态Lidar (Solid-state LiDAR)--OPA
TOF激光雷达的扫描方式有转镜、MEMS、棱镜、Flash等,目前,多数FMCW激光雷达厂商都选择了OPA扫描方案。可以说FMCW天生更搭配OPA扫描,但是没有OPA扫描,不代表FMCW就做不出来,它可以用转镜、也可以用MEMS、棱镜。
OPA即光学相控阵,通过对阵列移相器中每个移相器相位的调节,利用干涉原理(类似的是两圈水波相互叠加后,有的方向会相互抵消,有的会相互增强))实现激光按照特定方向发射。
OPA与Flash的关键区别在于,“Flash像手电筒一样,一下打出来就是一个面,光的能力比较分散,每个点上的能量很小,因而探测距离比较短;而OPA是点扫描,能力比较集中,因而可在同等功率下更实现更长的探测距离”。
将OPA扫描部件跟相干光路、探测器集成到同一个硅片上,接下来,只要能解决将三五族芯片(激光器)跟硅基芯片的集成问题,就可以将扫描和收发集成到一起。
OPA跟光源之间的耦合会有一个很大的插损,“这是整个业界都很难解决的问题”。而这一难题的解决进度,将在很大程度上决定FMCW激光雷达“真正的芯片化”的进度。
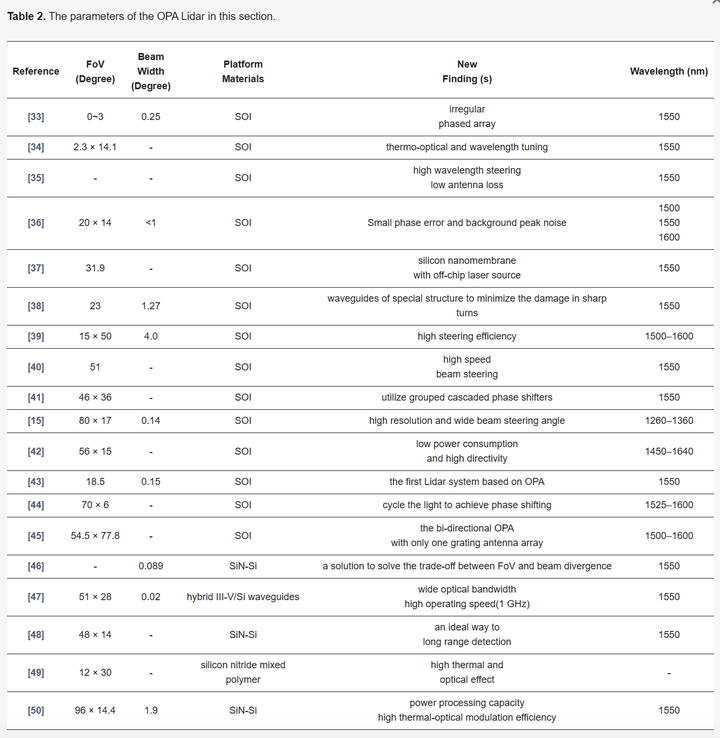
Ref:Advances in Silicon-Based Integrated Lidar

技术共进,成长同行——讯飞AI开发者社区
更多推荐
 34
34 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)