
双目立体视觉——华为云-云享MindTalks第十二期
前言前段时间在华为云-云享MindTalks第十二期中分享了双目视觉,个人的水平比较菜,分享时间也比较短,只能简单地分享一下基础和思路;制作PPT时主要参考了一些论文,同时也参考了一些网上的博客;目录单目视觉双目视觉1)双目摄像头2)打开双目摄像头3)双目测距4)立体视觉系统双目立体匹配(额外讲解)参考开始分享单目视觉双目视觉1)双目摄像头2)打开双目摄像头链接3)双目测距...
前言
前段时间在华为云-云享MindTalks第十二期中分享了双目视觉,个人的水平比较菜,分享时间也比较短,只能简单地分享一下基础和思路;制作PPT时主要参考了一些论文,同时也参考了一些网上的博客;
目录
开始分享

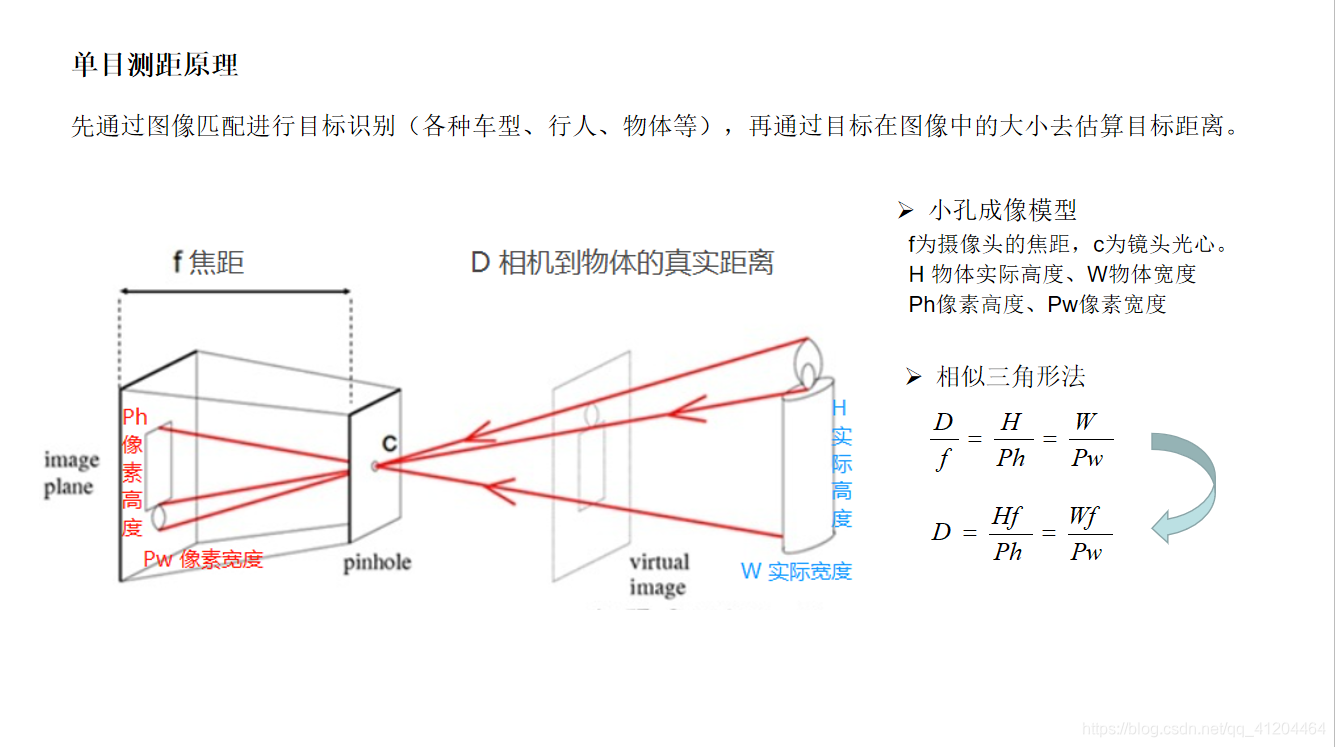
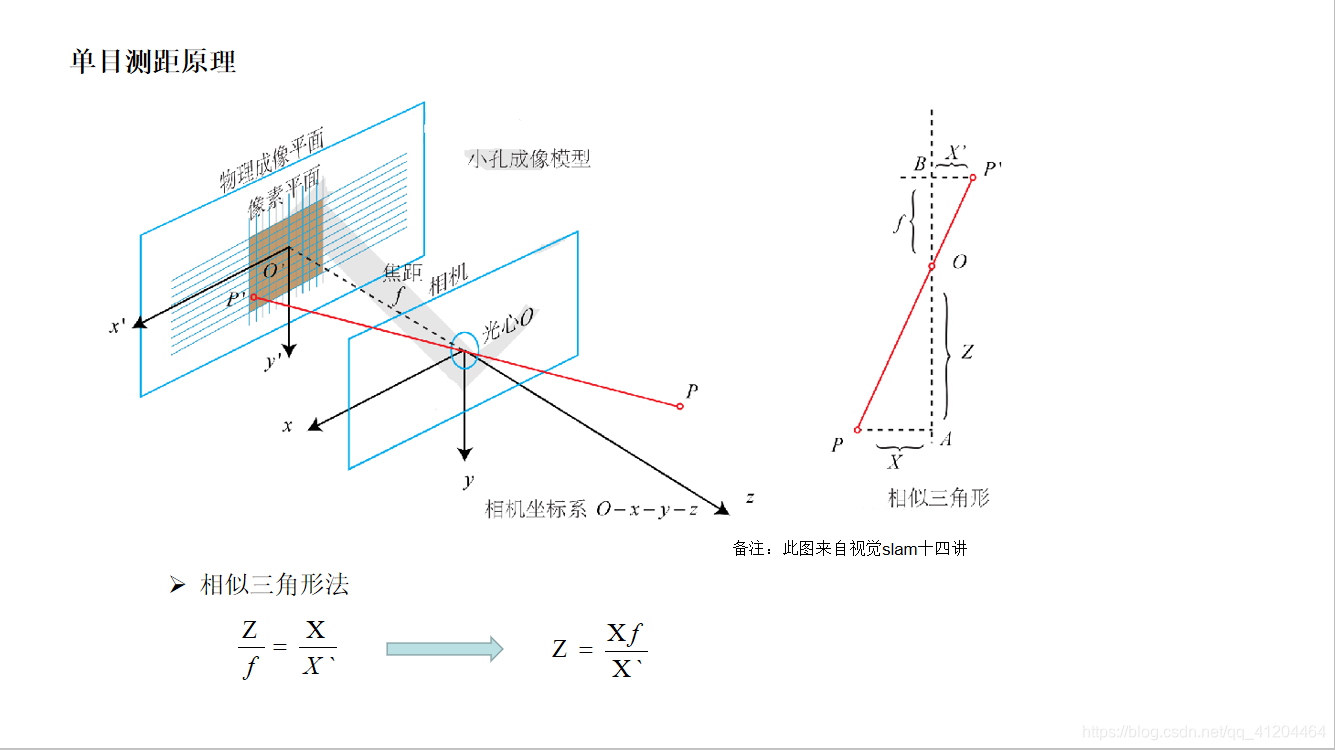
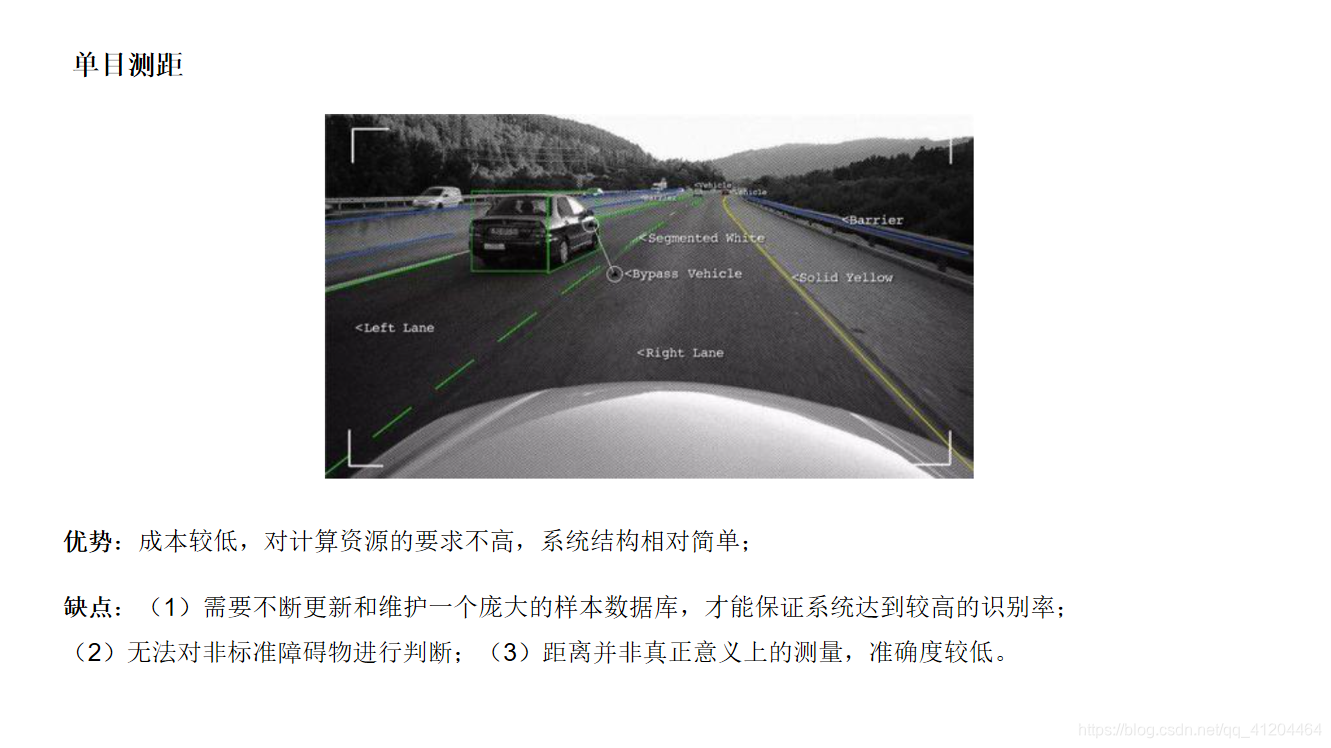
单目视觉
下面几款是比较常见的单目摄像头;有的用于工业、有的用于学习开发、有的是用于监控。

双目视觉
1)双目摄像头


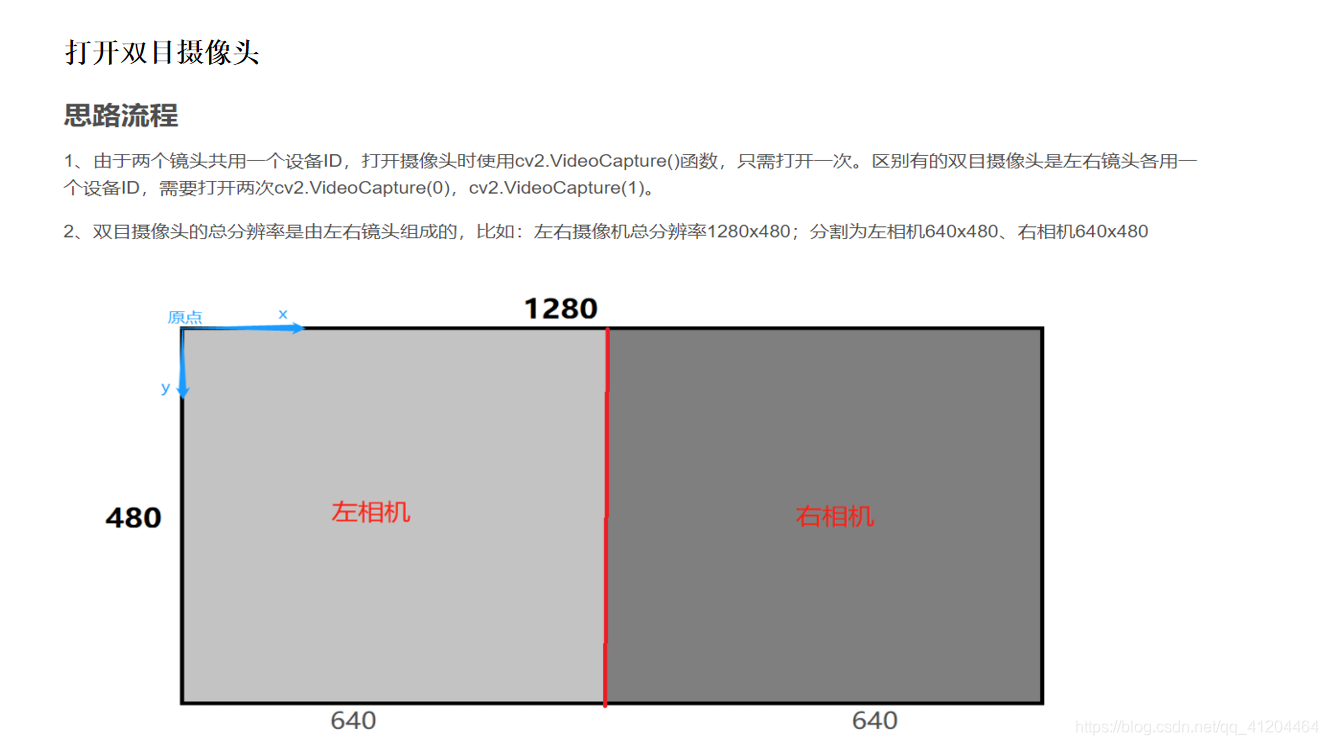
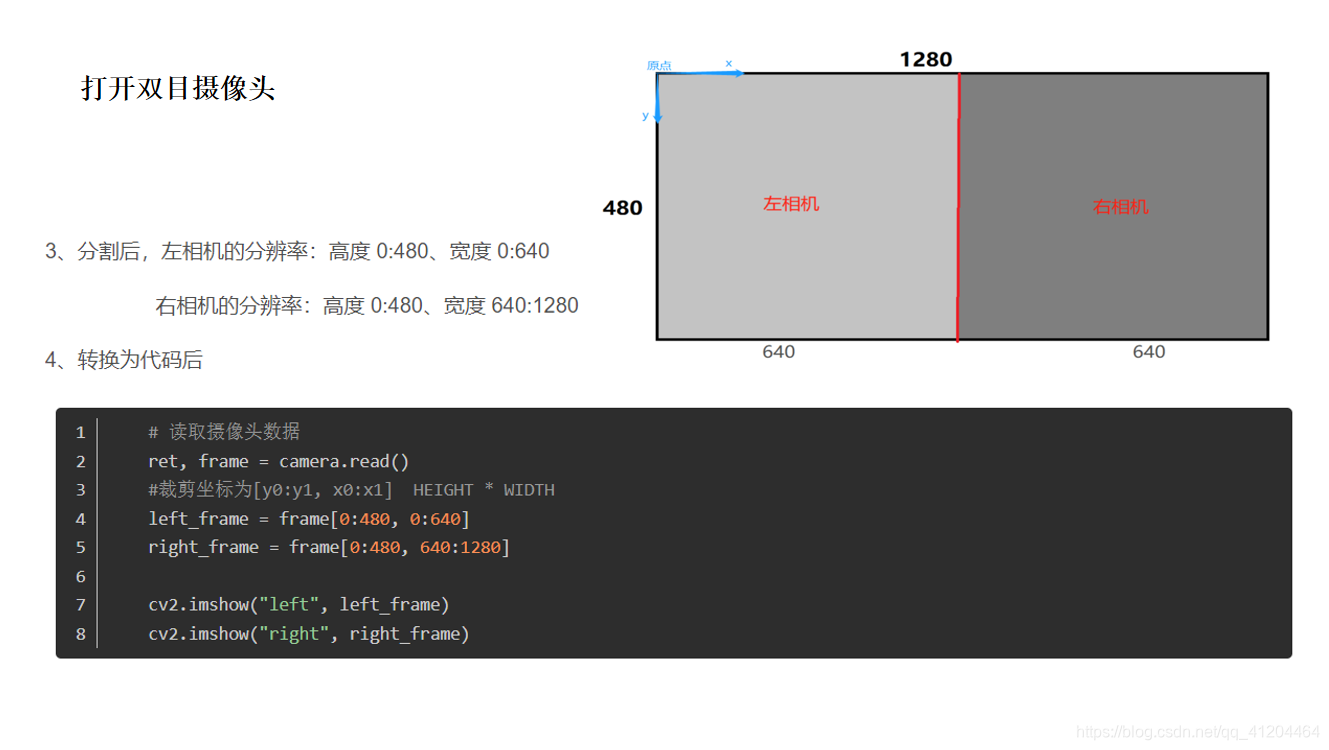
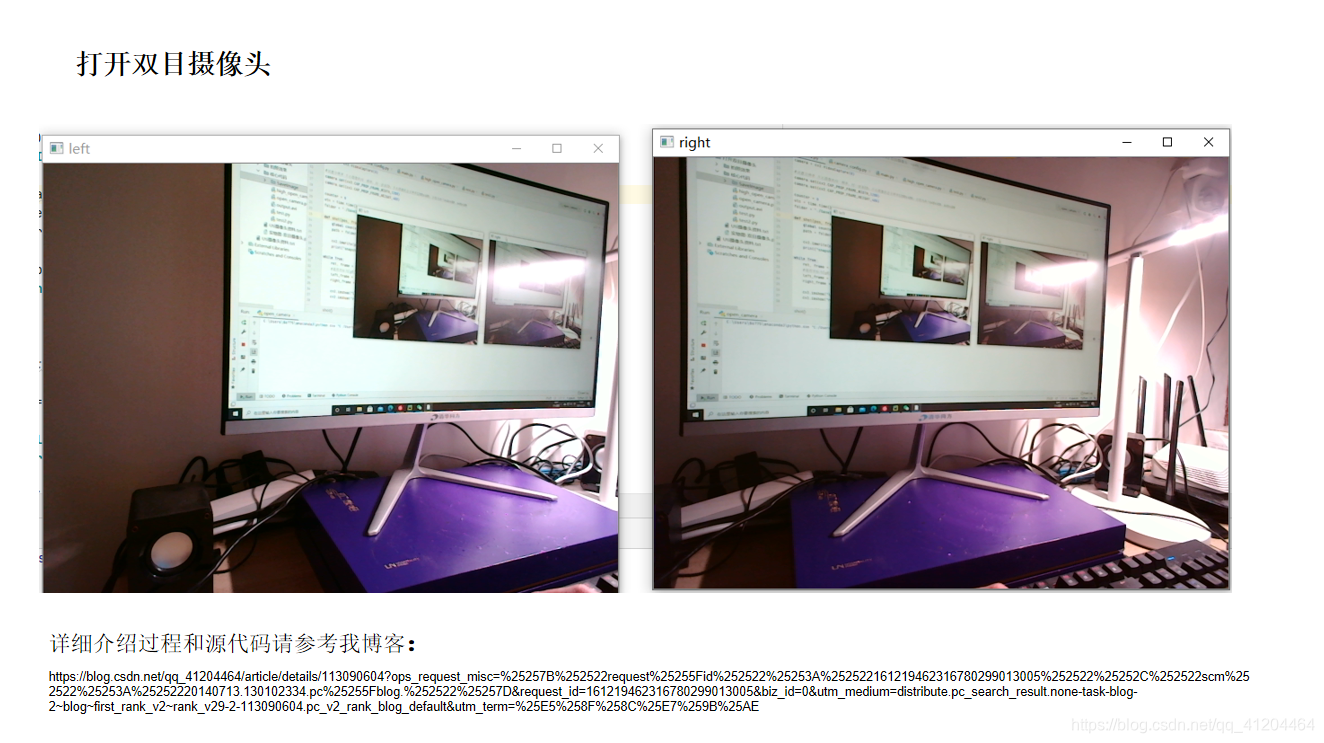
2)打开双目摄像头

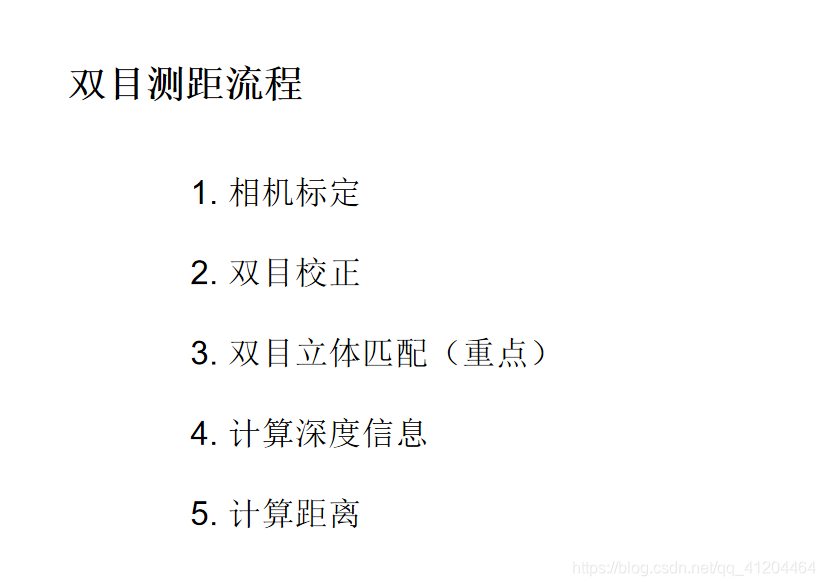
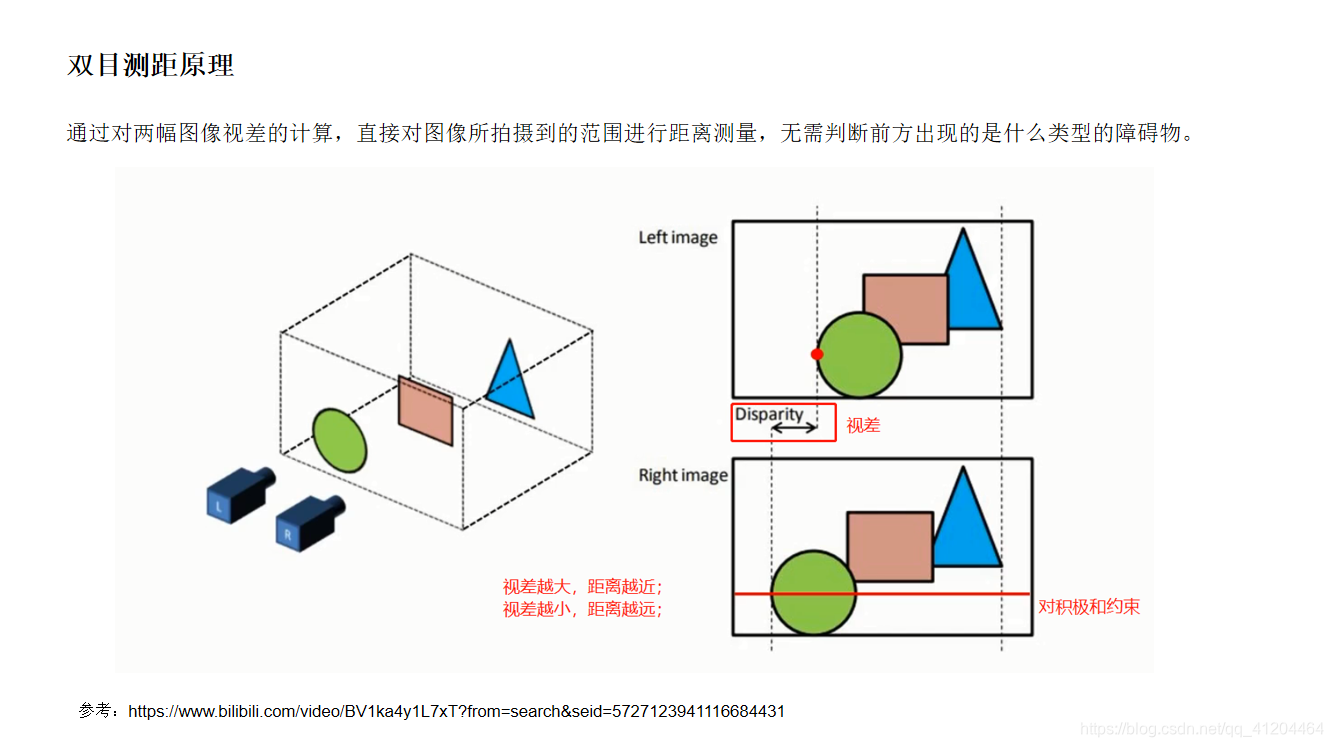
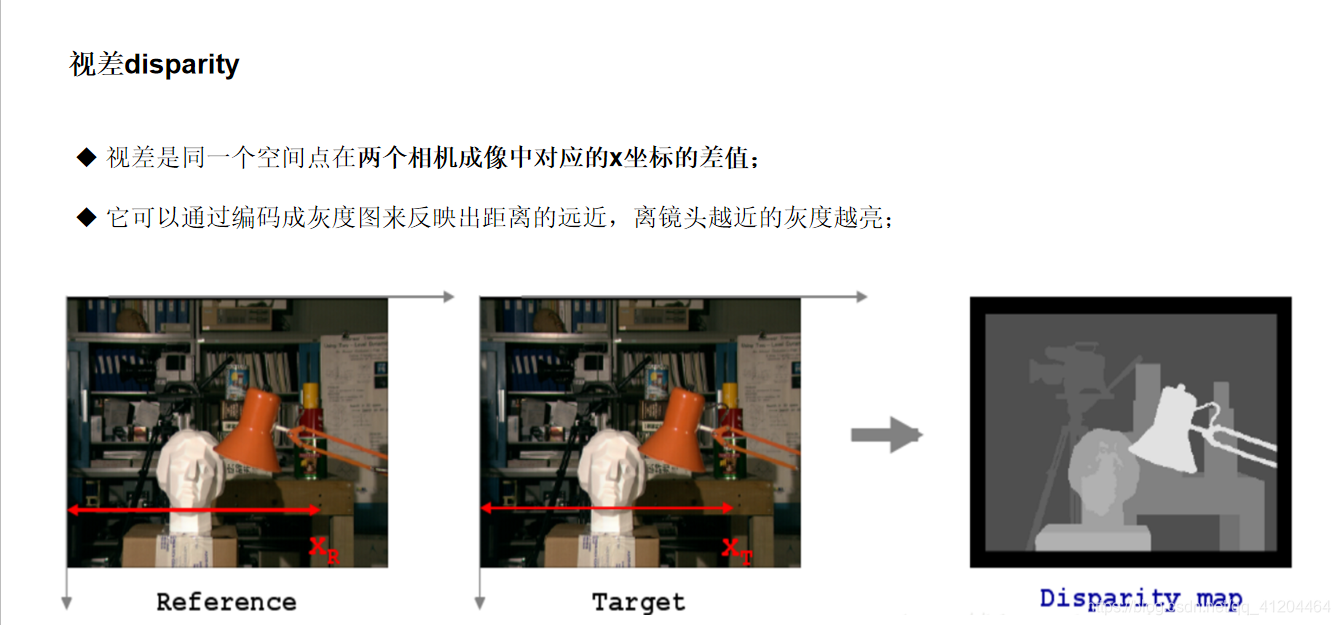
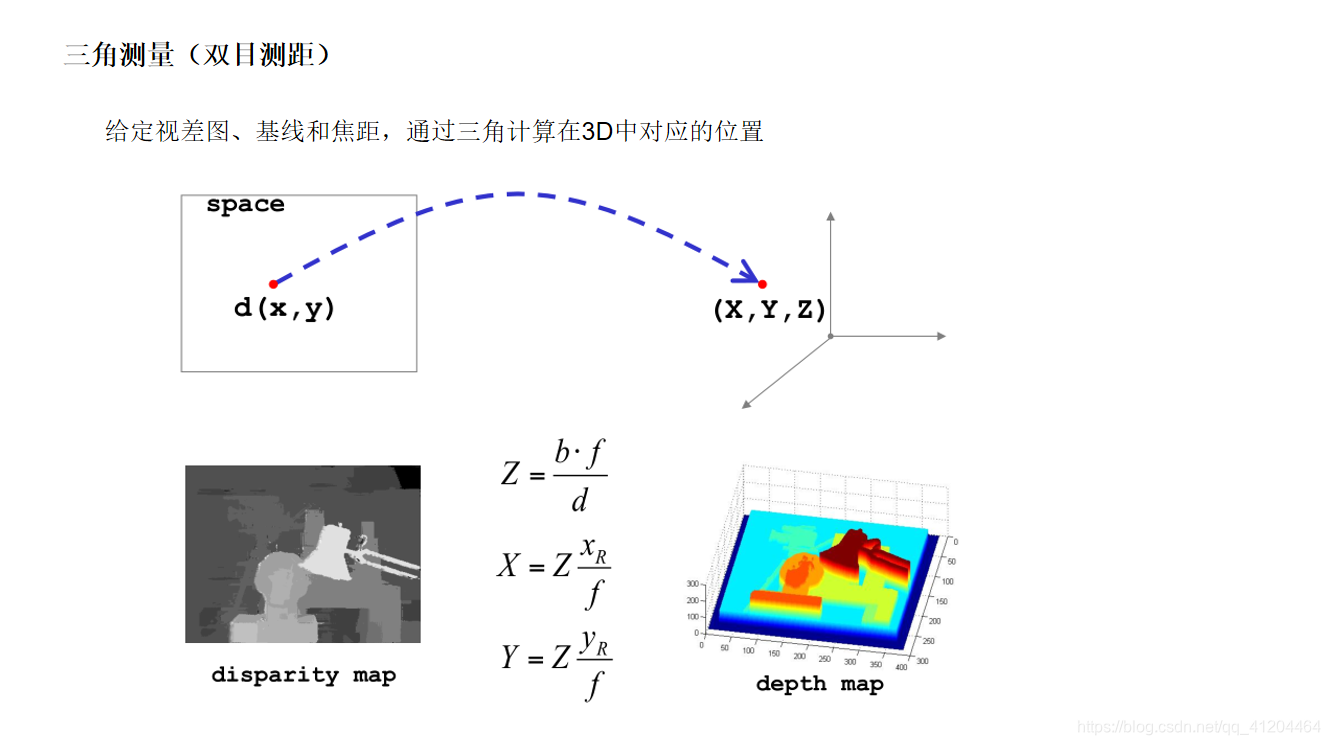
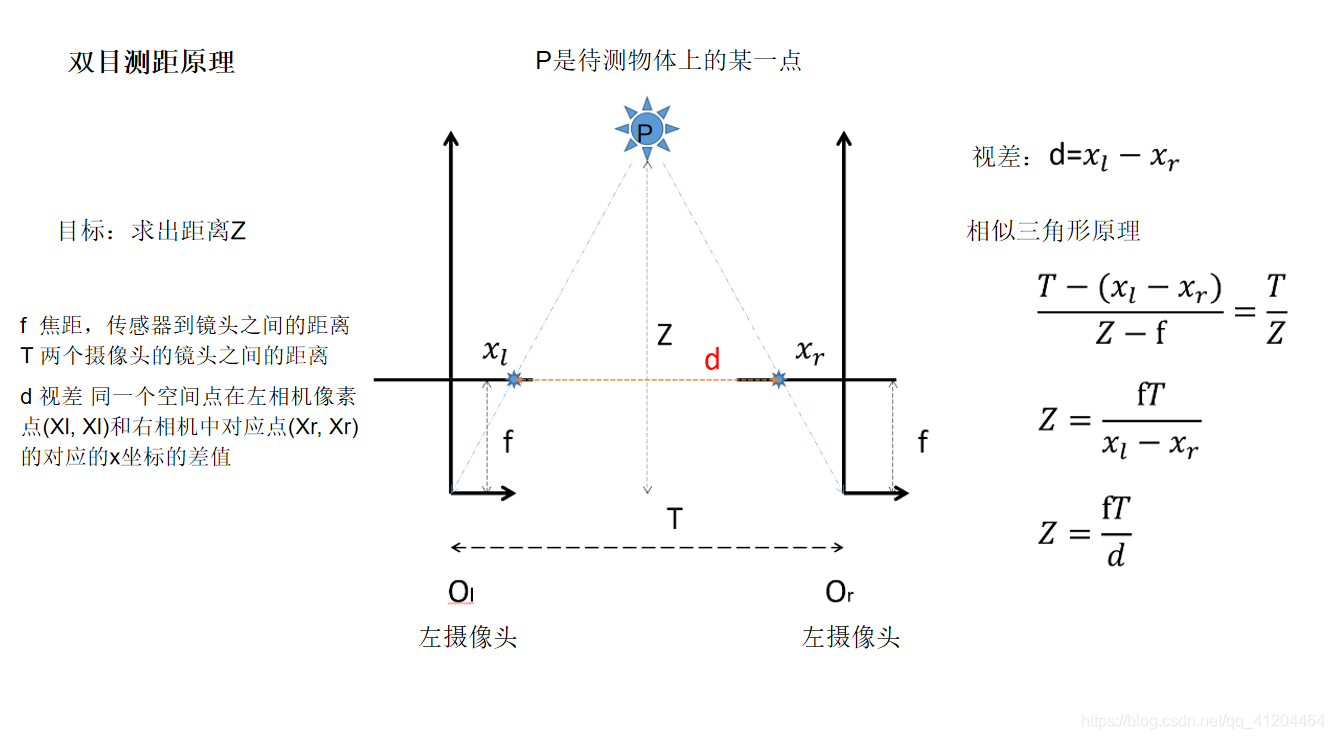
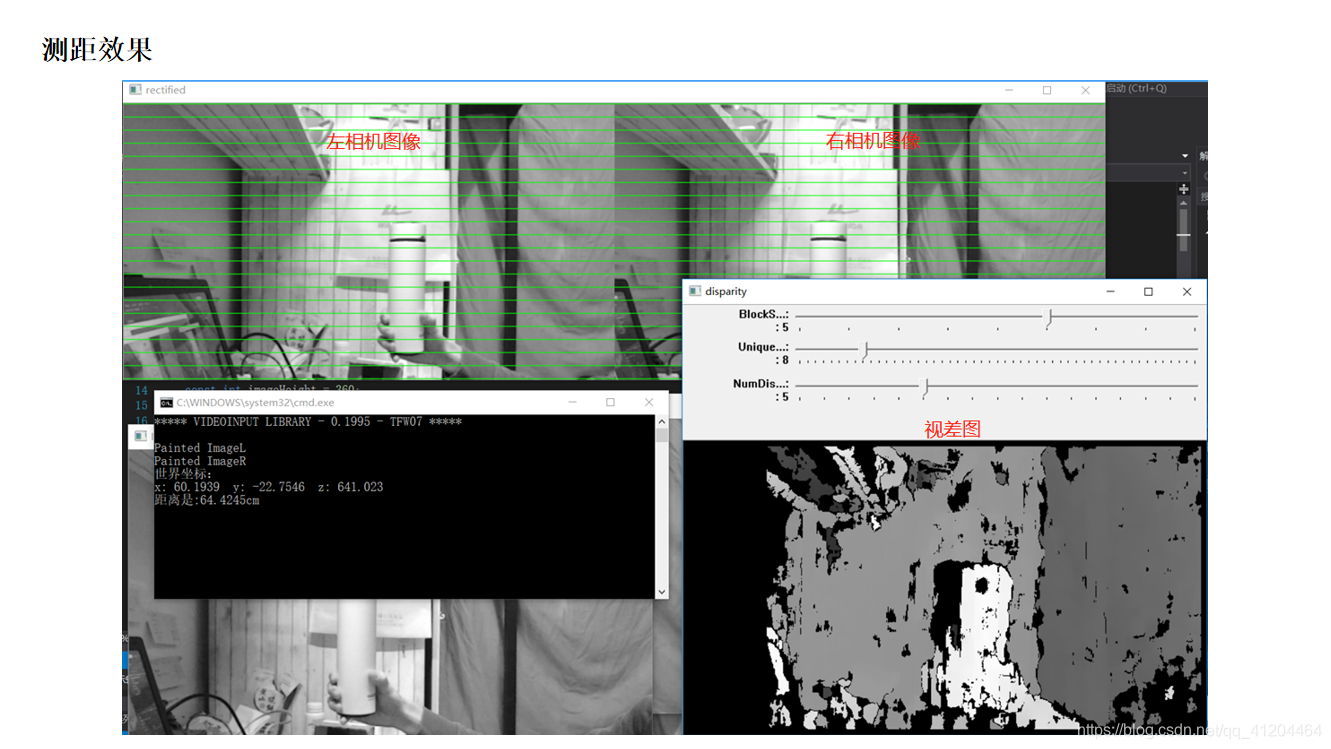
3)双目测距

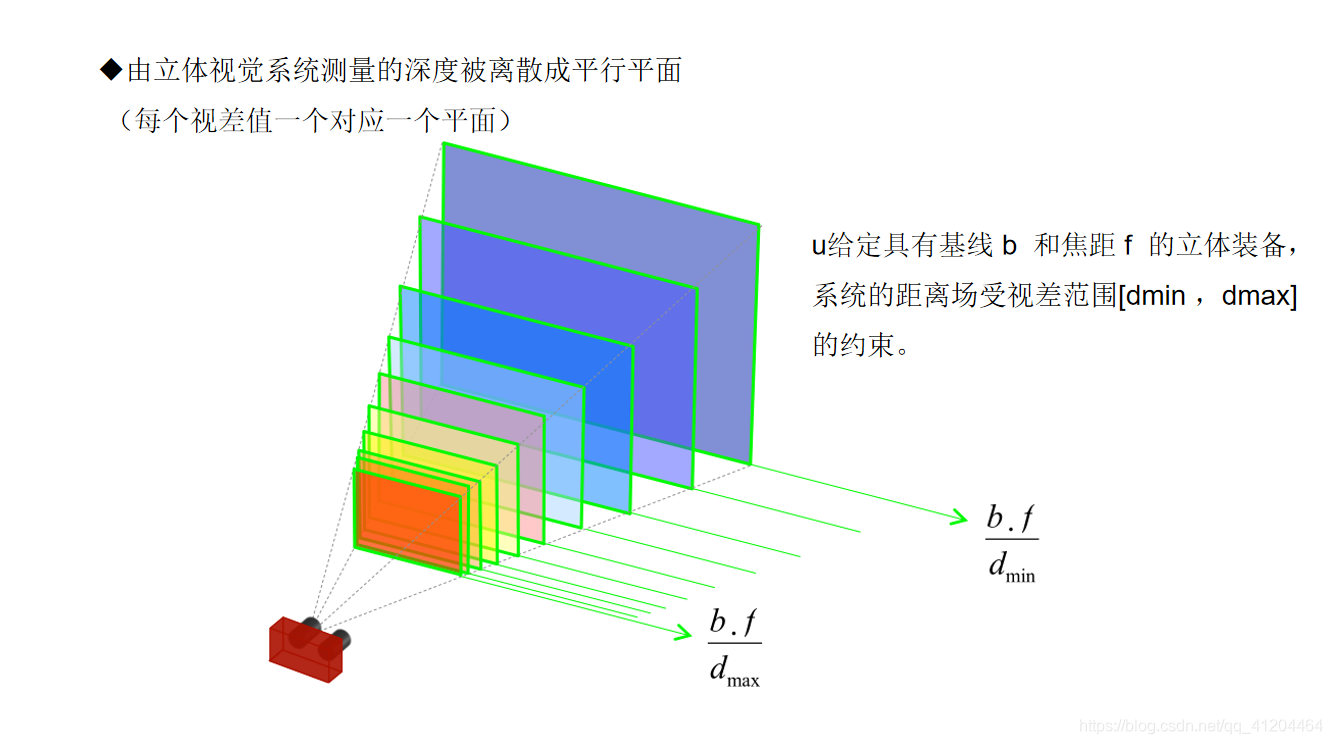
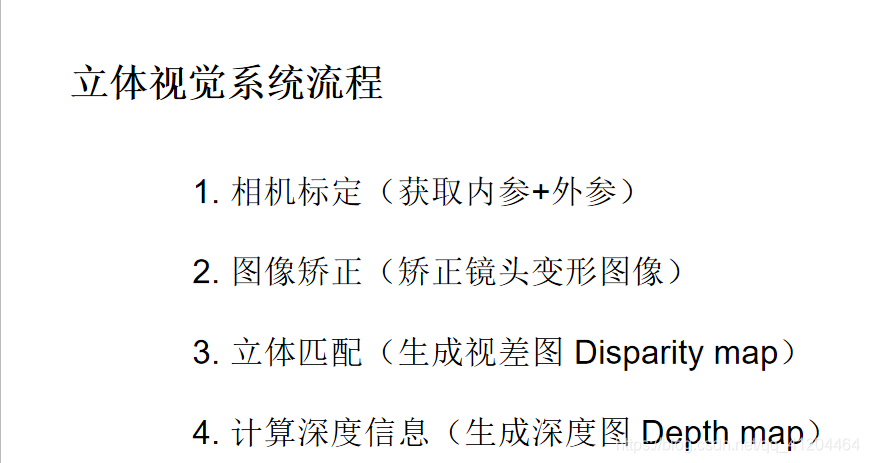
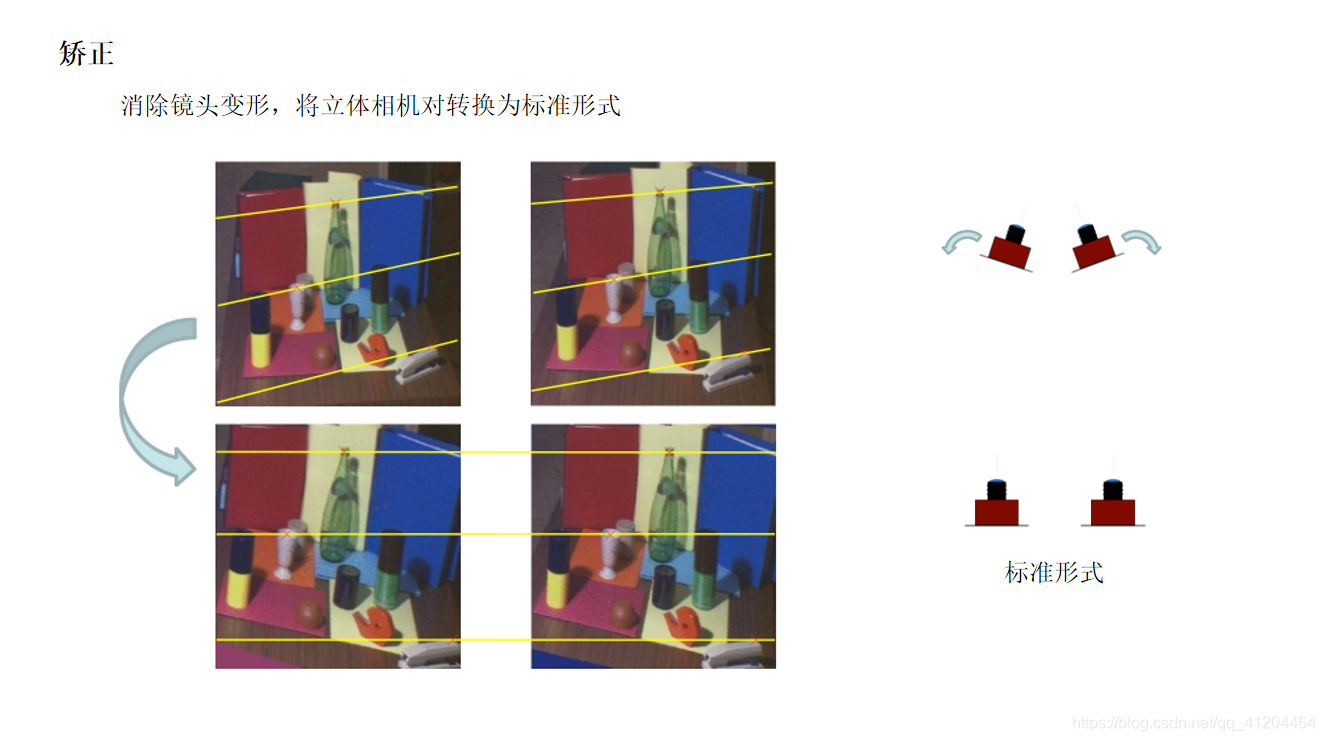
4)立体视觉系统
双目标定
- 摄像头由于光学透镜的特性使得成像存在着径向畸变,可由三个参数k1,k2,k3确定。
- 由于装配方面误差,传感器与光学镜头之间并非完全平行,因此成像存在切向畸变,可由两个参数p1,p2确定。
- 单个摄像头的定标主要是计算出摄像头的内参(焦距f、成像原点,五个畸变参数即:一般只需要计算出k1,k2,p1,p2,对于鱼眼镜头等径向畸变特别大的才需要计算k3。
- 双目摄像头定标不仅要得出每个摄像头的内部参数,还需要通过标定来测量两个摄像头之间的相对位置(即右摄像头相对于左摄像头的旋转矩阵R、平移向量t)
双目标定参数
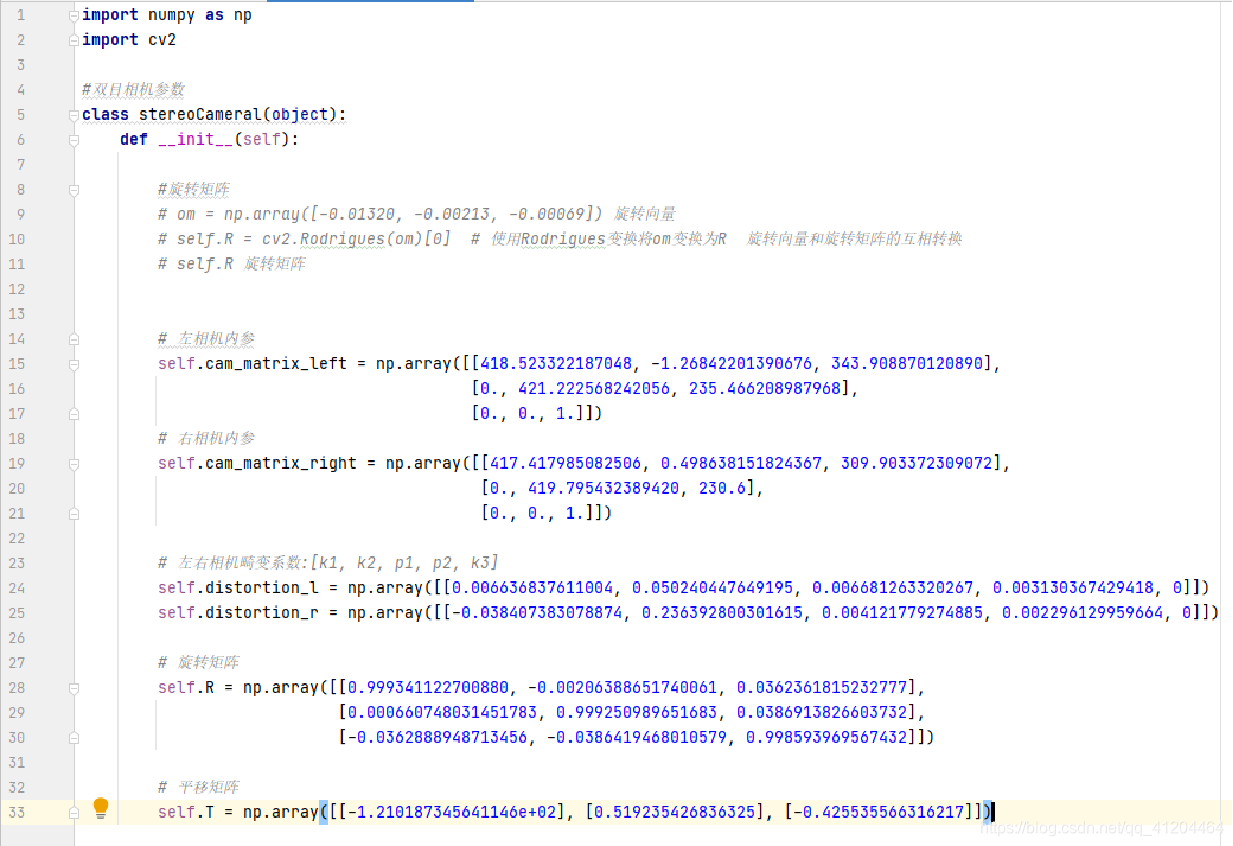
这里说一些旋转矩阵,它是3x3的矩阵(9个参数);有的朋友标准出来是一个旋转向量(3个参数),需要把旋转向量转换为旋转矩阵;相关代码对于开头注释的地方。
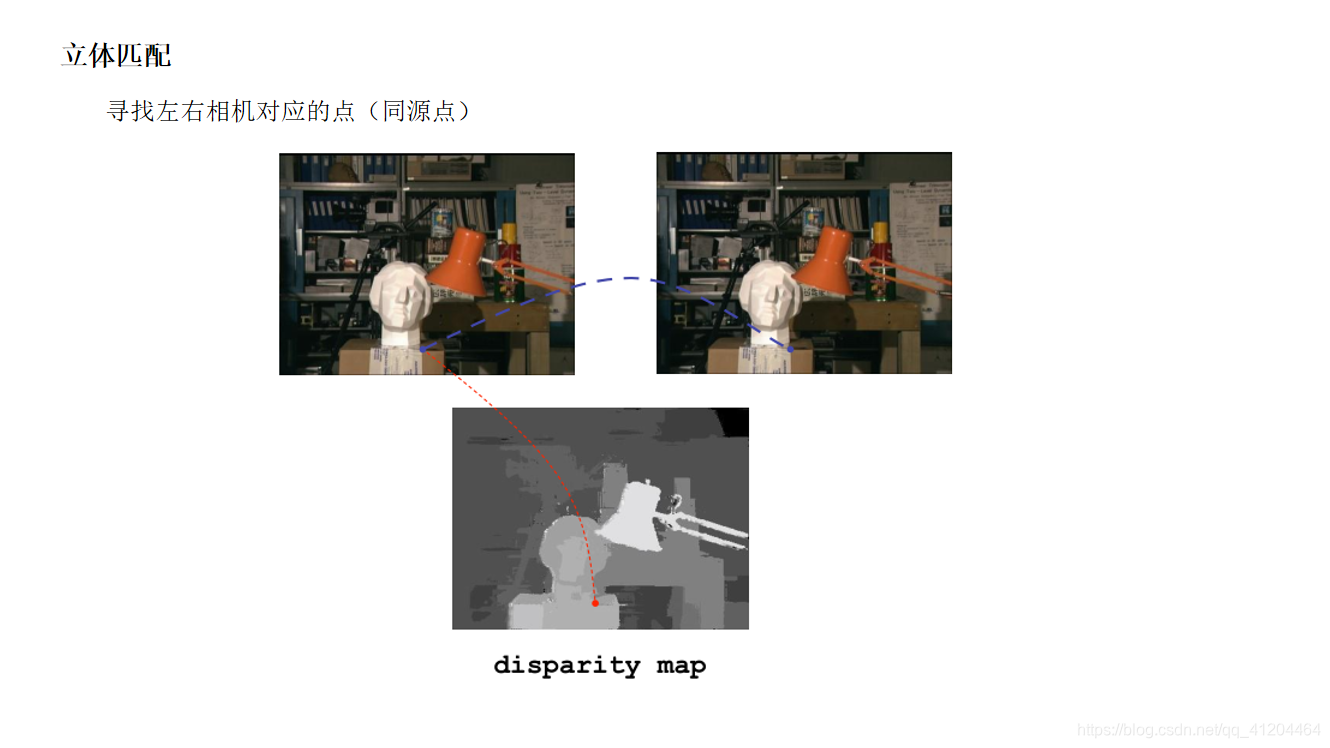
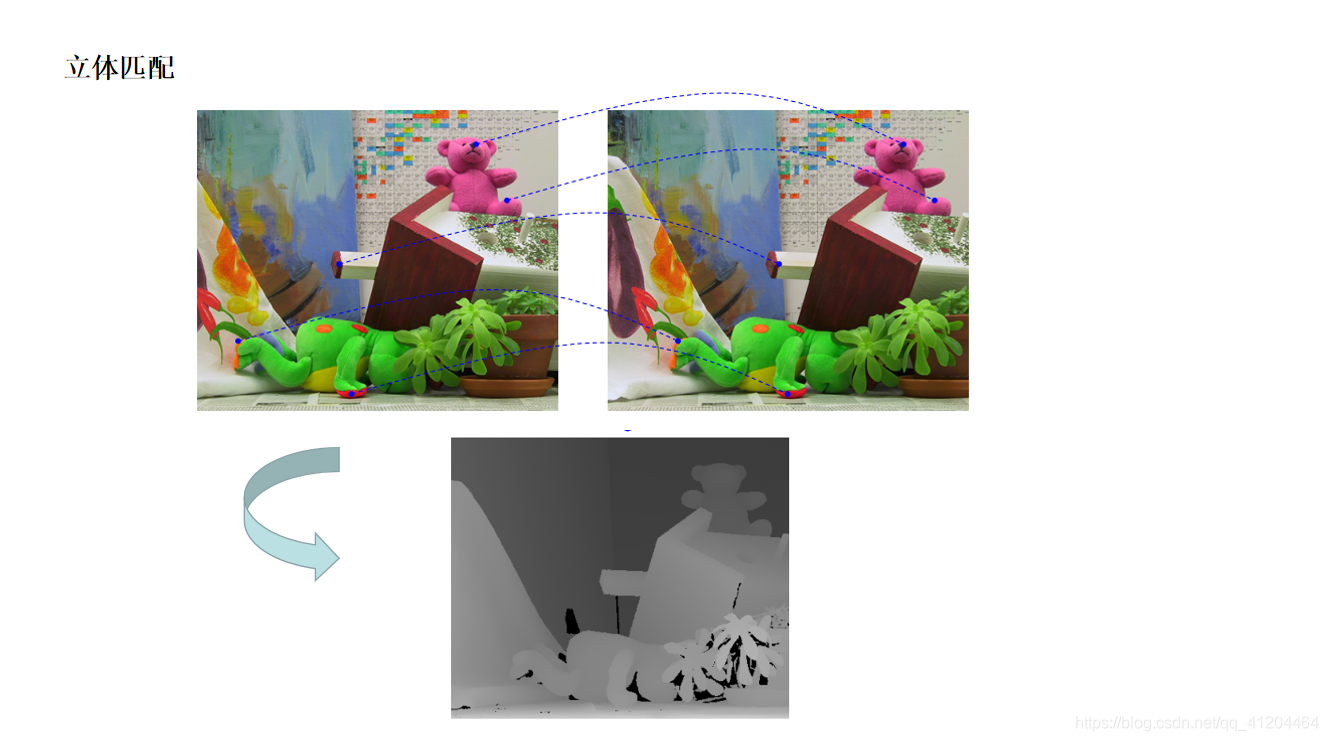
双目立体匹配(额外讲解)
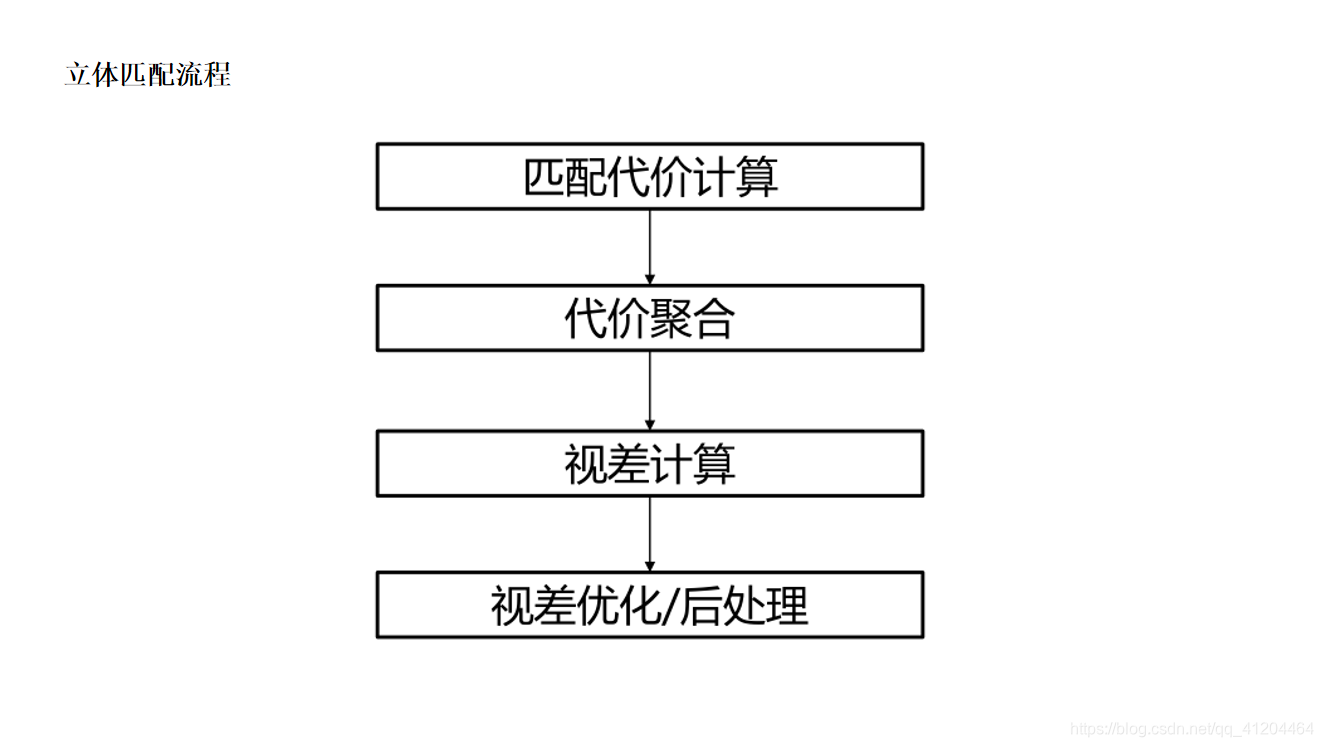
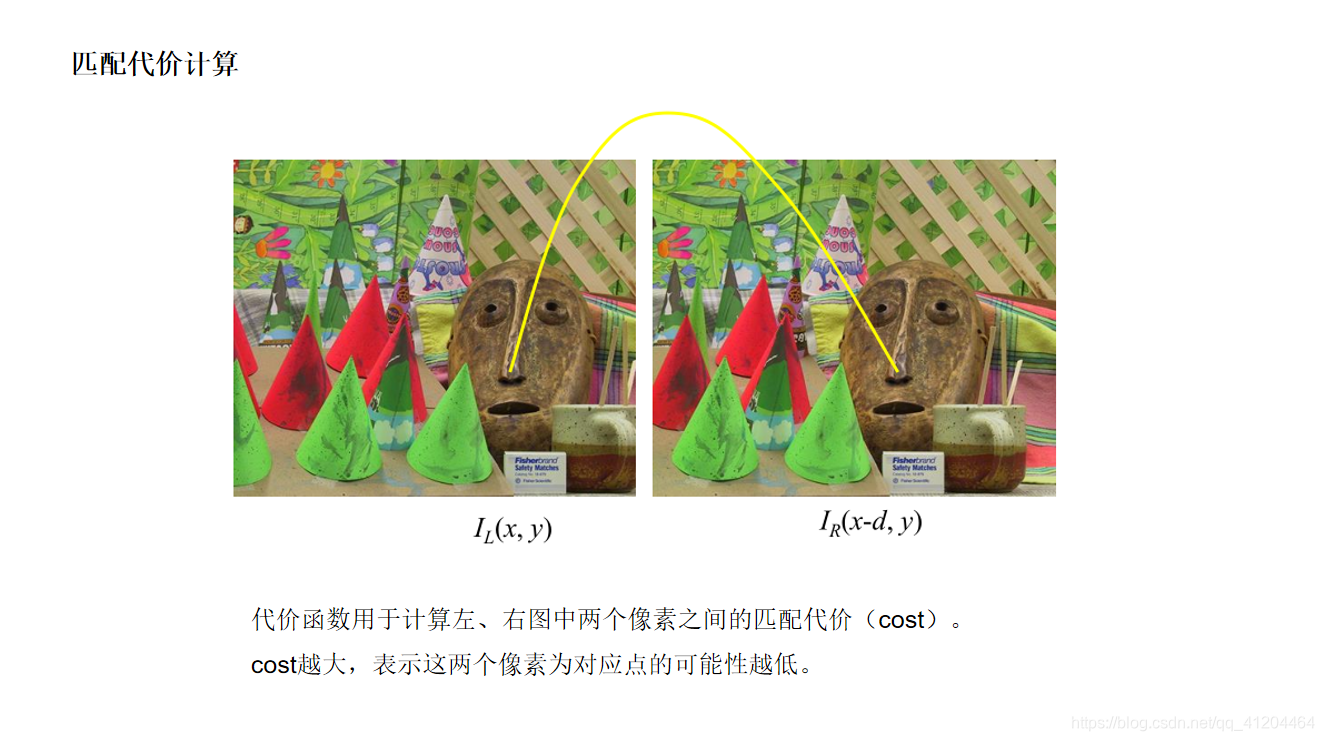
代价函数
- AD/BT
- AD+Gradient
- Census transform
- SAD/SSD
- NCC
- AD+Census
- CNN

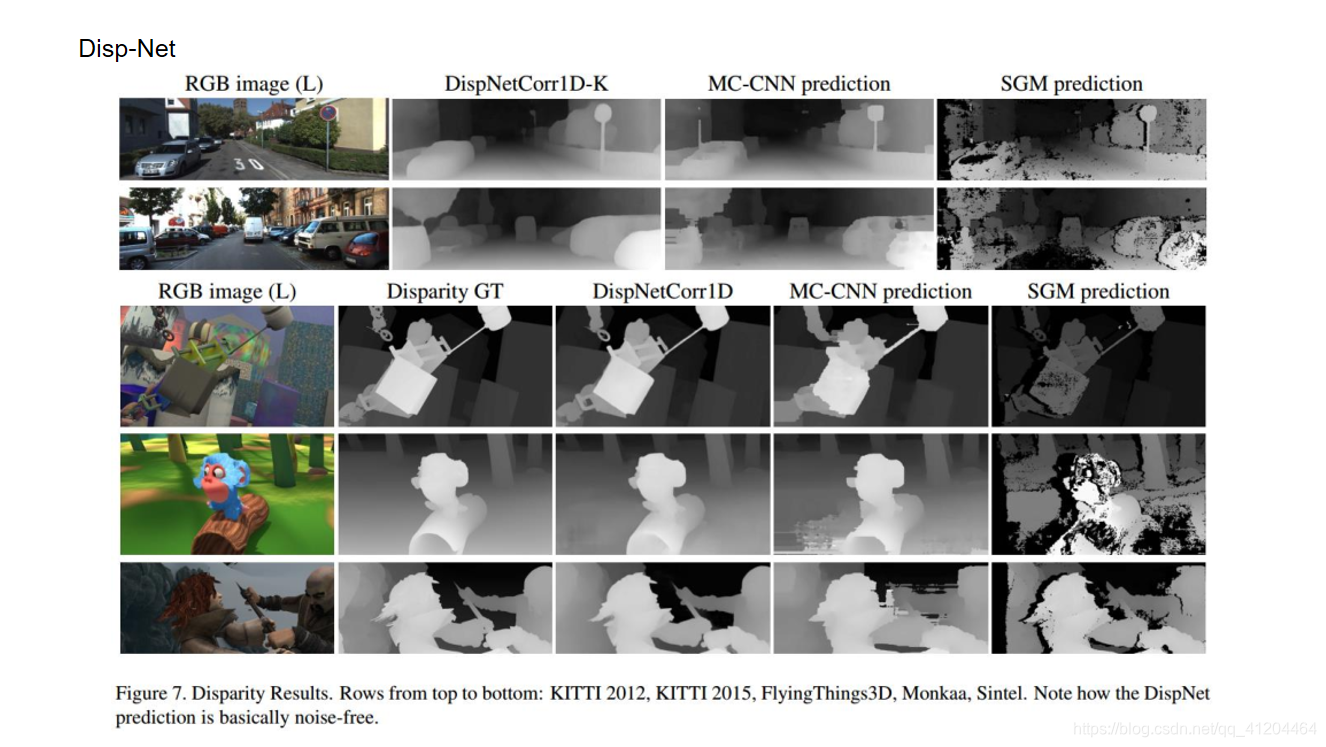
端到端视差计算网络
Disp-Net (2016)
GC-Net (2017)
iRestNet (2018)
PSM-Net (2018)
Stereo-Net (2018)
GA-Net (2019)
EdgeStereo (2020)
双目测距总结
优势:
(1)成本比单目系统要高,但尚处于可接受范围内,并且与激光雷达等方案相比成本较低;
(2)没有识别率的限制,因为从原理上无需先进行识别再进行测算,而是对所有障碍物直接进行测量;
(3)直接利用视差计算距离,精度比单目高;
(4)无需维护样本数据库,因为对于双目没有样本的概念。
难点:
(1)计算量大,对计算单元的性能要求高,这使得双目系统的产品化、小型化的难度较;(芯片或FPGA)
(2)双目的配准效果,直接影响到测距的准确性;
(3)对环境光照非常敏感;(光照角度、光照强度)
(4)不适用于单调缺乏纹理的场景;(天空、白墙、沙漠)
(5)相机基线限制了测量范围。(基线越大,测量范围越远;基线越小,测量范围越近)
参考:
1)[Wang 2015] Wang W, Yan J, Xu N, et al. Real-time high-quality stereo vision system in FPGA. IEEE Transactions on Circuitsand Systems for Video Technology, 2015, 25(10): 1696-1708.2)
2)[Kim 2016] K.-R. Kim and C.-S. Kim. Adaptive smoothness constraints for efficient stereo matching using texture and edgeinformation. ICIP 2016.
3)[Zbontar 2016] Zbontar J, LeCun Y. Stereo matching by training a convolutional neural network to compare image patches.Journal of Machine Learning Research, 2016.
4)[Park 2017] Park H, Lee K M. Look wider to match image patches with convolutional neural networks. IEEE Signal ProcessingLetters, 2017.
5)Leonid Keselman, et al. Intel R RealSenseTM Stereoscopic Depth Cameras. CVPRW. 2017.
6)立体匹配算法原理与应用.奥比研究院.徐玉华
7)基于双目视觉的空间非合作目标姿态测量技术研究.颜坤
8)https://www.bilibili.com/video/BV1ka4y1L7xT?from=search&seid=5727123941116684431
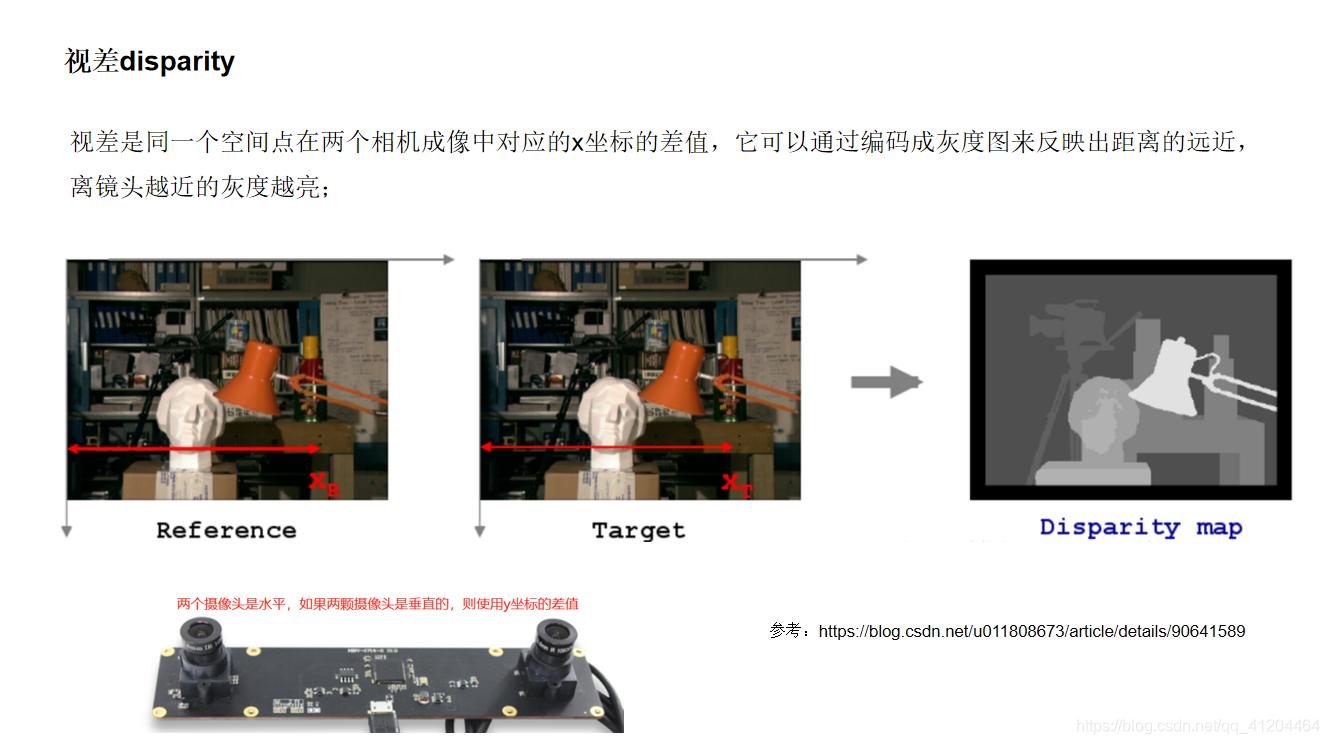
9)https://blog.csdn.net/u011808673/article/details/90641589 10)https://www.cnblogs.com/polly333/p/5130375.html

技术共进,成长同行——讯飞AI开发者社区
更多推荐
 1
1 0
0- 0



 已为社区贡献20条内容
已为社区贡献20条内容

所有评论(0)