
自动驾驶中的传感器技术30——Lidar(5)
激光雷达主流扫描模式原理概述 目前激光雷达主要采用6种扫描模式:1)机械旋转式,通过多激光器垂直堆叠和整体旋转实现360°扫描,但可靠性差;2)棱镜式(如大疆Livox),采用双楔形棱镜折射实现玫瑰花结扫描;3)转镜式(如禾赛AT128),利用多面体转镜反射实现等速扫描;4)MEMS振镜式(如速腾),通过微机电镜片谐振偏转扫描;5)混合式(如图达通猎鹰),结合转镜水平扫描和振镜垂直扫描;6)Fla
行业Lidar 几种主流扫描(Scanning)模式原理论述如下
1、机械式Lidar--汽车LiDAR的“先行者”
早期的车载Lidar形态,可靠性低,价格昂贵。

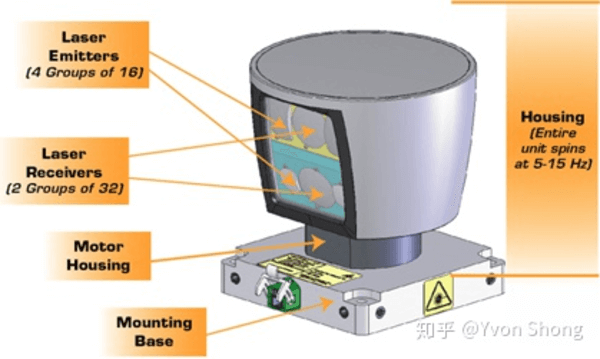
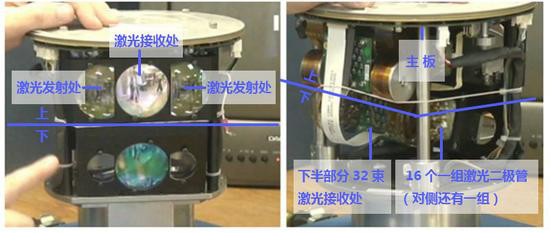
Velodyne在2007年推出了一款LiDAR,该激光器垂直堆叠64个激光器,使整个设备每秒旋转多次。发射和接收系统中存在物理旋转感,这意味着通过连续旋转发射器并在垂直方向上排列多个激光发射器,将激光点变成线条,形成一个表面,用于3D扫描和接收信息。但由于机械结构复杂,实现高频精确旋转,平均故障时间仅为1000-3000小时,难以满足整车厂家最低13000小时的要求。
一些常见的机械雷达产品包括德国公司 Sick、日本公司 Hokuyo 生产的产品,一些公司生产更实惠的版本,例如RPLiDAR。



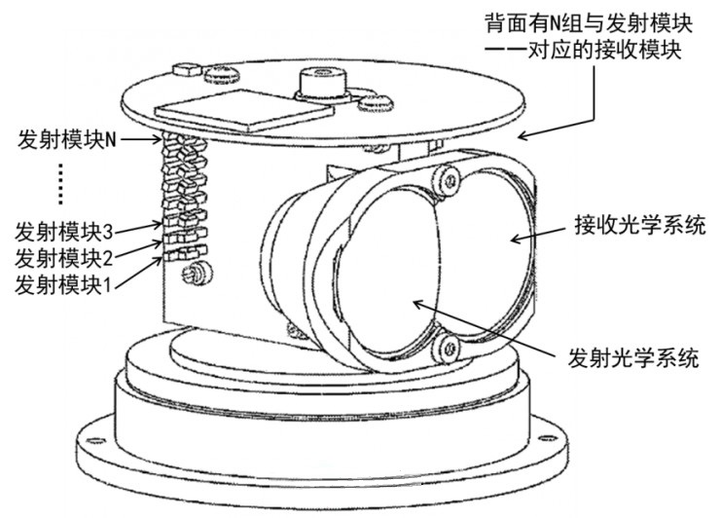
该雷达前端有一个发射光学系统和一个接收光学系统,在发射光学系统后端有N组发射模块,而在接收光学后端有N组与发射模块一一对应的接收模块(图中背面遮挡不可见)。当激光雷达开始工作时,N组发射模块和N组接收模块在电路的控制下按照一定的时间顺序轮流工作,例如,在时刻1,发射模块1工作,发射激光脉冲,同时接收模块1接收目标反射的发射模块1发射的激光信号;在时刻2,发射模块2工作,发射激光脉冲,同时接收模块2接收目标反射的发射模块2发射的激光信号;……在时刻N,发射模块N工作,发射激光脉冲,同时接收模块N接收目标反射的发射模块N发射的激光信号。这样在俯仰方向就可以形成非机械式的光学扫描,其扫描角度间隔由两个相邻模块之间的间隔和光学系统的焦距来确定。Velodyne的所有产品在俯仰方向均采用这种“固态扫描”技术进行扫描,在方位方向通过机械扫描实现360º旋转扫描,这就是Velodyne的“固态混合扫描”。
Velodyne的这种固态扫描技术具有以下优点:
扫描速度快:扫描速度只决于发射模块的电子学响应速度,不受材料的特性影响,但其扫描角度一定设计好后就完全固定,不能通过电控进行改变。
接收视场小:这种扫描技术是一种发射和接收同步扫描技术,接收视场小,抗光干扰能力强,信噪比高。
可承受高的激光功率:这种扫描技术完全是在自由空间中进行,可以采用高峰值功率的激光脉冲进行高信噪比的探测。
同时,这种扫描技术也存在以下问题:
实现二维扫描比较困难:按照目前这种非集成式的模块化设计难以实现二维扫描,必须通过机械或其他方式实现另一维的扫描。集成化是这种技术发展的必然趋势,也是实现二维扫描的关键。
扫描角度固定:但其扫描角度一定设计好后就完全固定,不能通过电控进行改变。
装调工作量大:需要将发射和接收模块进行精密光学对准装配,工作繁复,工作量大,大批量生产难度大。
2、棱镜式Lidar
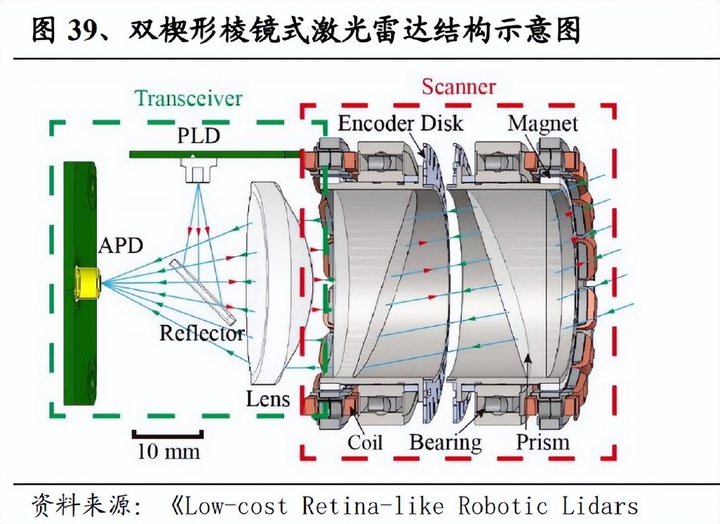
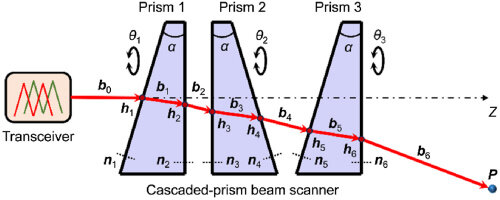
双楔形棱镜方案是指其内部包括两个楔形棱镜,激光在通过第一个楔形棱镜后发生第一次偏转,通过第二个楔形棱镜后发生第二次偏转,只要控制两面棱镜的相对转速便可以控制激光的扫描形态。
大疆是国内唯一一家选择双楔形棱镜方案的公司,旗下Mid系列、Horizon系列和Tele系列均采用这种方案。
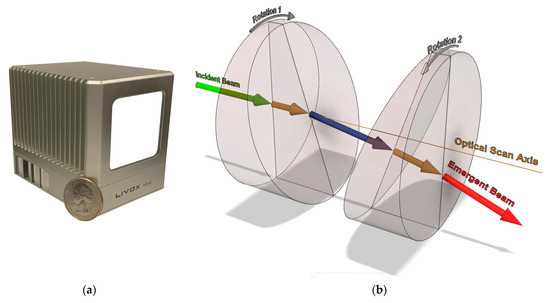
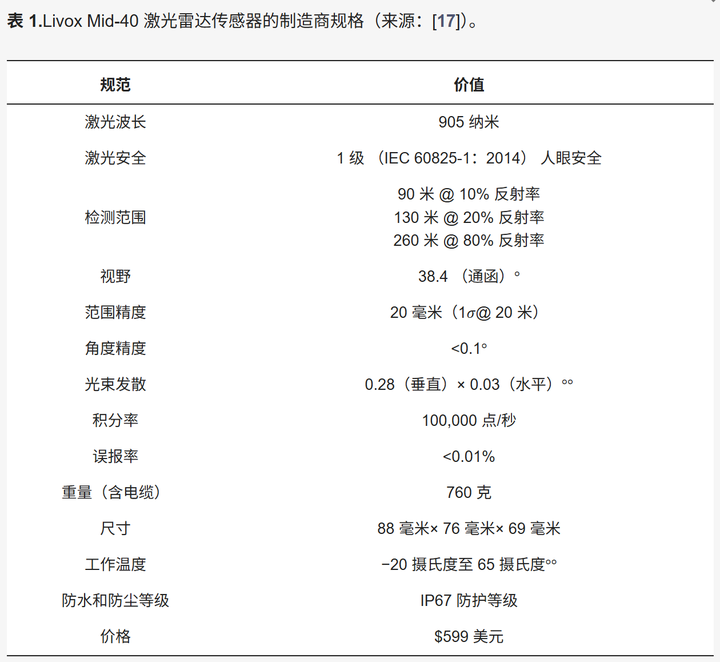
与使用多个激光收发器的机械旋转阵列的多线激光雷达传感器(例如Velodyne VLP-16)不同,Mid-40仅使用单个激光收发器,该激光收发器相对于传感器自身的坐标系处于静止位置和方向,类似于大多数地面激光扫描仪(TLS)。然而,与通常使用反射镜来反射激光束的 TLS 不同,Mid-40 的光束使用 Risley 棱镜光学机构进行控制,该机构由两个楔形玻璃棱镜组成,这些棱镜沿光学扫描轴方向依次排列(上图b)。每个棱镜都可以绕光学扫描轴旋转,导致入射光束被玻璃棱镜折射。根据棱镜相对于彼此的相对方向,涌射光束在某个方向上偏离。
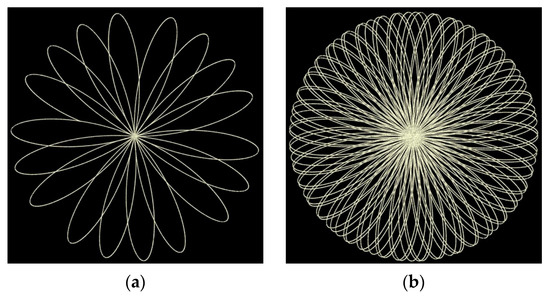
使用Risley棱镜机制,只需调整每个棱镜的旋转速率和方向,就可以实现各种独特的扫描模式。Mid-40 观察到的扫描图案通常被描述为玫瑰花结图案,它发生在围绕光学扫描轴的圆形视场 (FoV) 内(下图a)。设置了 Mid-40 内部玻璃棱镜的旋转速率,因此激光雷达观测不会沿着 FoV 内的单个投影路径重复进行,而是 FoV 内的观测密度随时间增加(下图b)。FoV内的观察密度是不均匀的,中心有一个峰,类似于人类视网膜的反应。
Ref:基于Risley Prism的Livox Mid-40激光雷达传感器的严格观测模型
3、转镜式Lidar(Polygon Mirror)
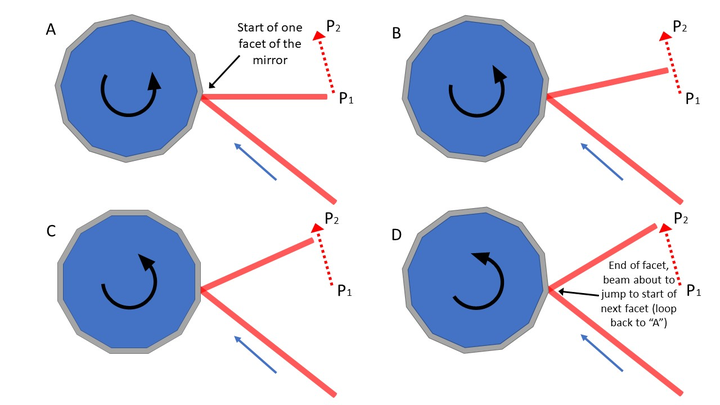
当激光束照射到多边形上的镜面时,它会以与入射光束相等且相反的角度反射。通过旋转多边形镜,激光束可以随着刻面角的移动而以不同的角度偏转。整个扫描周期如上图 所示:(A-C) 反射镜旋转,光束移动。当刻面边缘旋转经过光束 (D) 时,激光捕捉回其弧的起点并再次开始扫描(返回 A)。与谐振振镜不同,多边形镜面速度不是固定的(不需要在特定频率下谐振),因此轮子可以以各种速度旋转,允许用户调整扫描速率。
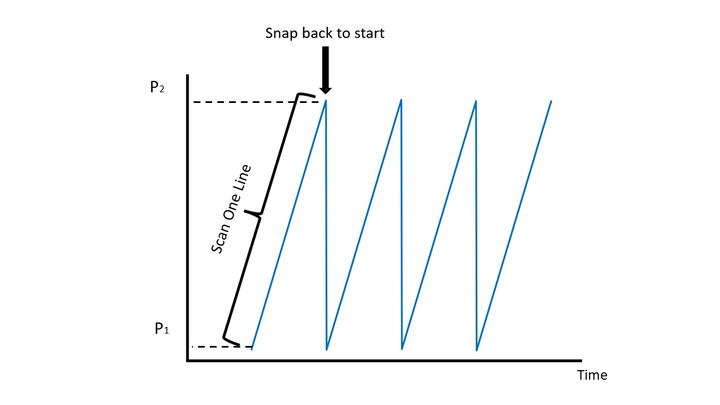
多边形镜在旋转时还提供恒定的像素停留时间,只要它以恒定速率旋转。该速率由控制电动机旋转多边形镜的电子设备维持,并将其保持在用户设定的速度。下图显示了多边形镜的扫描图案。将此与下一节所示的谐振镜的扫描模式进行比较:多边形镜在从P 1到P 2时将给出恒定速率(位置和时间的直线图),而谐振扫描仪遵循可变速度的正弦路径(端点的正弦行为)。多边形反射镜也会受到其他因素的影响,但与谐振镜一样,精密工程可以最大限度地减少对成像质量的影响。
Polygon Mirror Scanner不是往复式设备,因此它会产生等速扫描。旋转设备,是最可靠的移动系统之一。
为了满足自动驾驶汽车市场的需求,30 多年来,多边形扫描仪中使用的滚珠轴承电机已被证明在移动应用中非常坚固。滚珠轴承扫描器适用于高达 10K RPM 的应用。空气轴承多边形扫描仪适用于 10K RPM 至 50K RPM 以上。这些 10K 至 50K RPM 空气轴承扫描仪可以在移动的车辆中生成高清 3D 激光雷达图像。
重要的是要认识到,高速意味着激光在样品中每个点花费的时间减少。换句话说,像素停留时间减少,因此检测到的光成比例地减少。例如,如果您在一秒钟内捕获 20 帧,则与需要整整一秒钟捕获的帧相比,每帧的光线大约是 1/20。在像素停留时间方面,标准振镜扫描仪提供 0.5 到 几十 微秒的像素停留,而多边形或谐振系统的像素停留量约为 10 到 100 纳秒(0.1 到 0.01 微秒)。
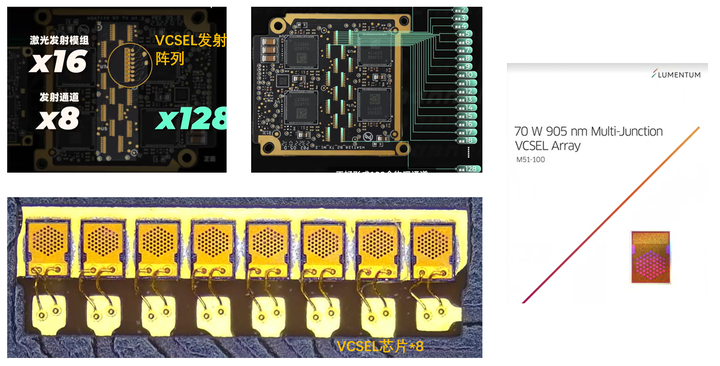
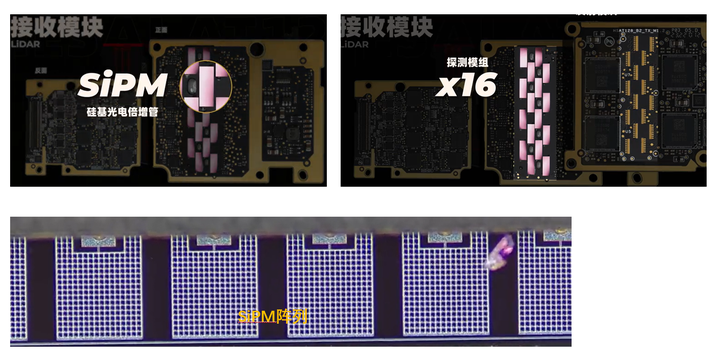
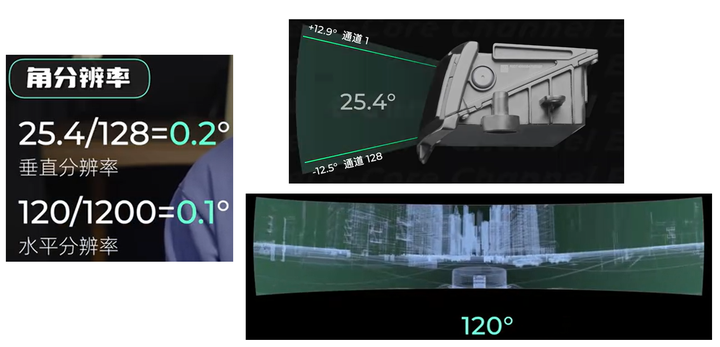
以禾赛AT128为例
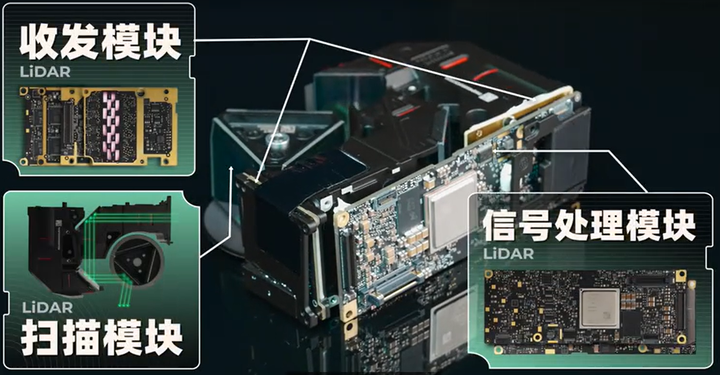
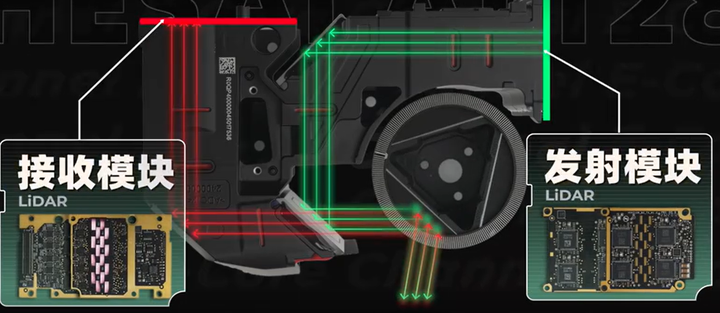


Ref:全网首拆!理想激光雷达——禾赛AT128,如何实现真128线?|Lidar拆解系列3_高清1080P在线观看平台_腾讯视频
4、MEMS振镜式Lidar
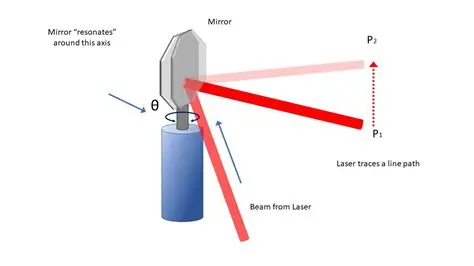
电或磁驱动信号施加在镜子及其支架的谐振频率上,使整体振动导致镜子来回旋转。旋转角度如图1所示。现在,如果激光束照射到镜子上,它会反射回来(反射定律)。当反射镜来回旋转时,反射的激光束也会从 P1移动到 P2,用激光在样品上描出一条线。
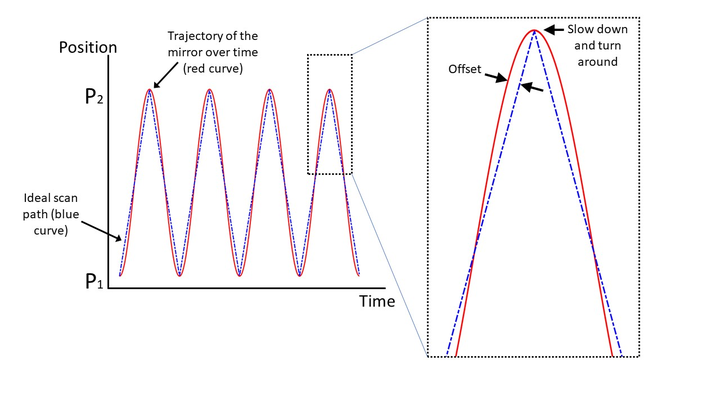
谐振扫描的一个缺点是反射镜的旋转速度随着它绕角度旋转而变化 。下图显示了镜子随时间变化的位置。理想情况下,镜子可以在不改变速度的情况下瞬间翻转方向(理想的响应显示为阴影线蓝线),但作为物理对象,当镜子到达扫描结束时,它会减速,非常短暂地停止,然后必须向另一个方向倒车并加速回来。真实行为由红色实线显示,因为系统需要时间来稳定和恢复运动。
变速的结果是,当反射镜在每次扫描结束时改变方向以返回另一个方向时,样品上的像素停留必须减慢。与中间相比,这会导致框架边缘的激光曝光时间更长。商业系统通过裁剪方向反转的扫描边缘或应用更复杂的软件/硬件校正来最大限度地减少变速的影响。
从实验室取出并安装在行驶车辆上的 MEMS 扫描仪发现了几个重大问题。
-
车辆的移动扰乱了Mirror的运动,很难知道 MEMS 镜子指向哪里!
-
较宽的温度范围影响了扫描,很难知道 MEMS 镜子指向哪里!
-
在速度上,MEMS 扫描仪是一种谐振设备,这意味着它在每次扫描结束时扫描速度最快,扫描速度最慢。这意味着扫描中心的分辨率最低,与激光雷达的要求相反。
-
薄而易碎的MEMS镜面平整度被描述为薯片!这限制了 MEMS 对超短距离扫描的限制。
-
MEMS 反射镜悬挂在非常细的扭杆之间,这些扭杆在其使用寿命结束时会突然断裂。
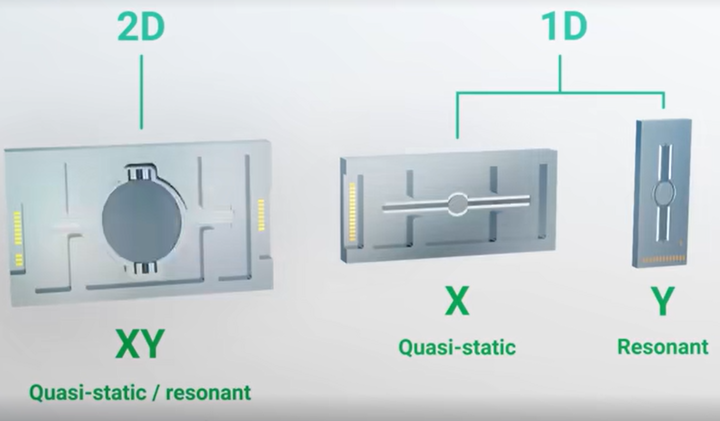

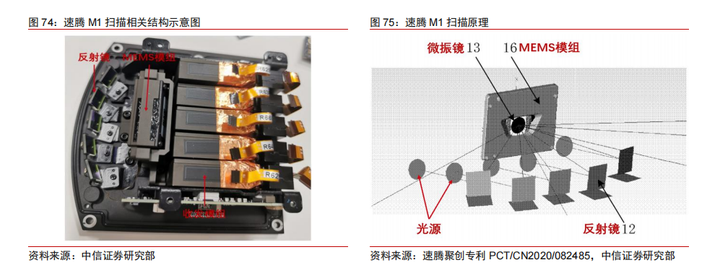
目前速腾掌握了非常强的MEMS振镜技术,所以其Lidar的主要技术方向是MEMS振镜式。


5、转镜振镜混合Lidar
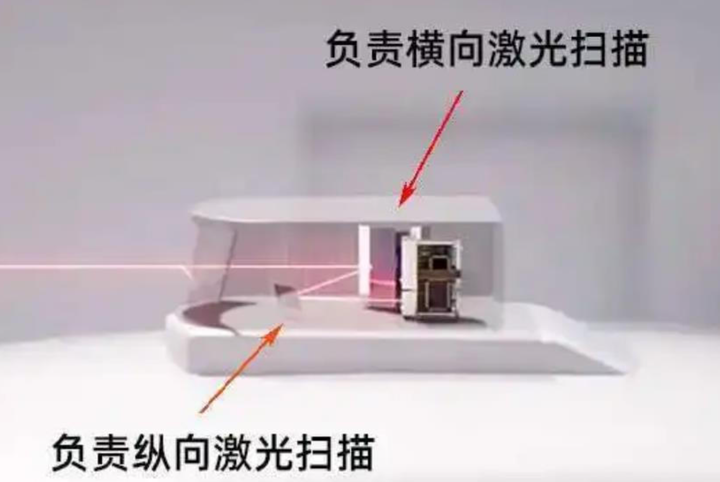
与单独的转镜方案不同,转镜+振镜方案灵活度较高,能够支持 ROI 设计(密集扫描 重点关注区域,其他区域保持常规扫描频率)。图达通的 falcon 激光雷达采用的就是转镜+ 振镜方案,转镜负责水平扫描,振镜负责垂直扫描。
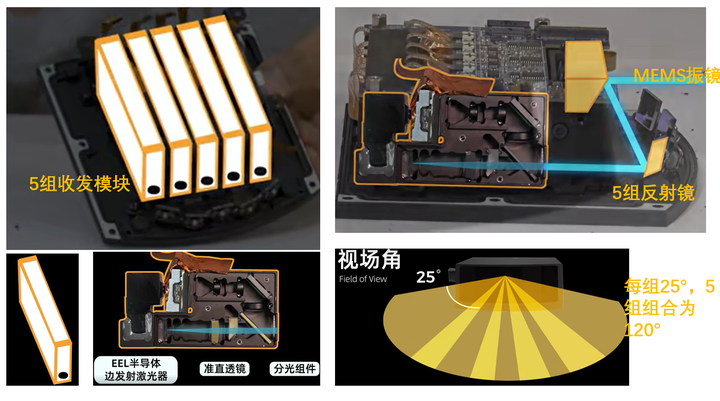
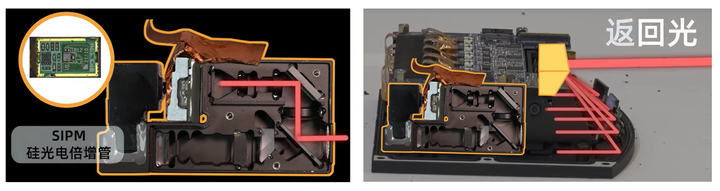
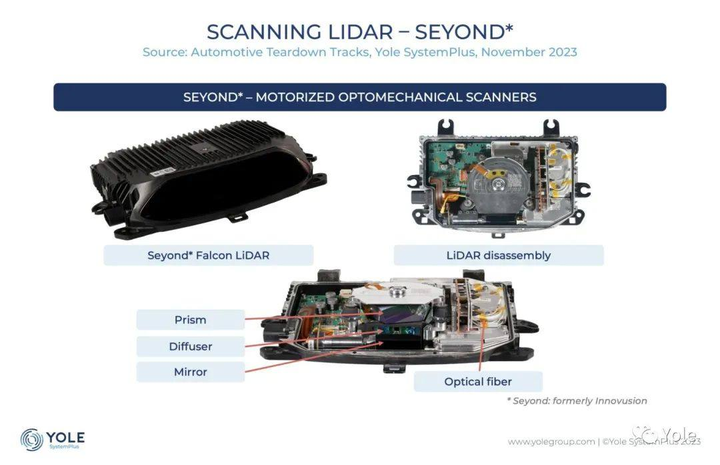
根据图达通发布的专利《用于 LiDAR 系统的二维操纵系统》,光束从光源射出后打在 振镜上,并被反射到转镜上,从转镜上反射到外界,再从被测物体处原路返回,回到接收 光路中。多个光源呈现略微不同的角度,同时向振镜发光,即可实现多线扫描。实际中采 用的是光纤一分四,四线同时扫描。
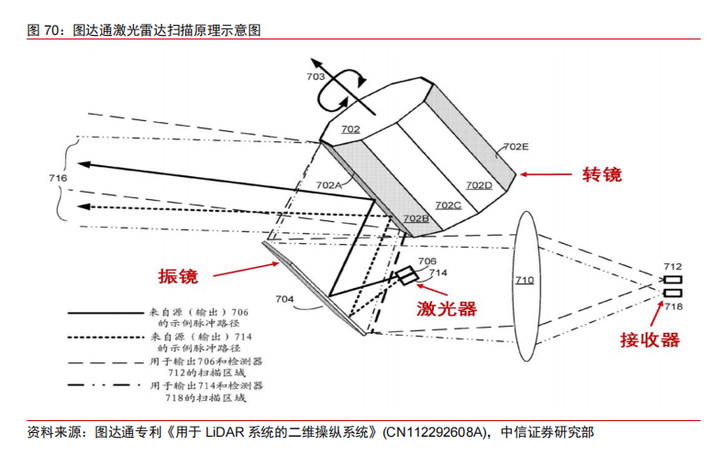

图达通的此种设计的一大优势在于能够灵活调节 ROI。垂直方向上,可以设定振镜在 某一角度区间内旋转较慢,则对应的范围内扫描点将会更密集。同时在一个特定的水平视 场角内也可以设定 ROI,这是通过改变激光器点频来实现的,由于转镜的转速是恒定不变 的,因此只需周期性提升激光器点频。
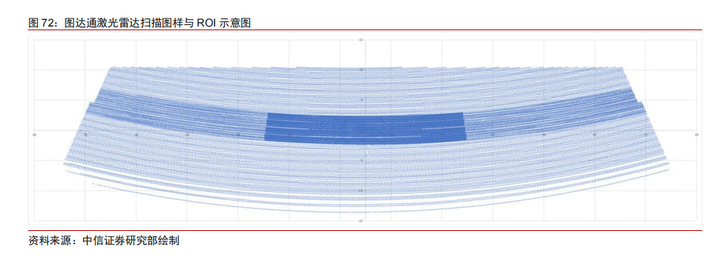
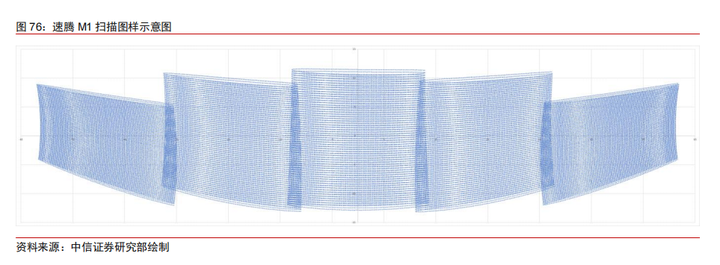
小结:图达通采用了光纤激光器,点光源发射,通过MEMS振镜实现垂直扫描,通过转镜实现水平扫描。
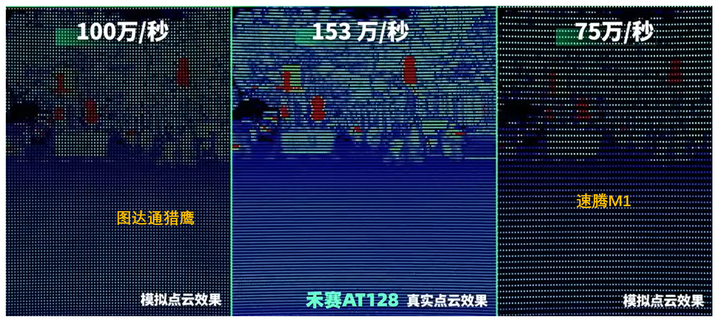
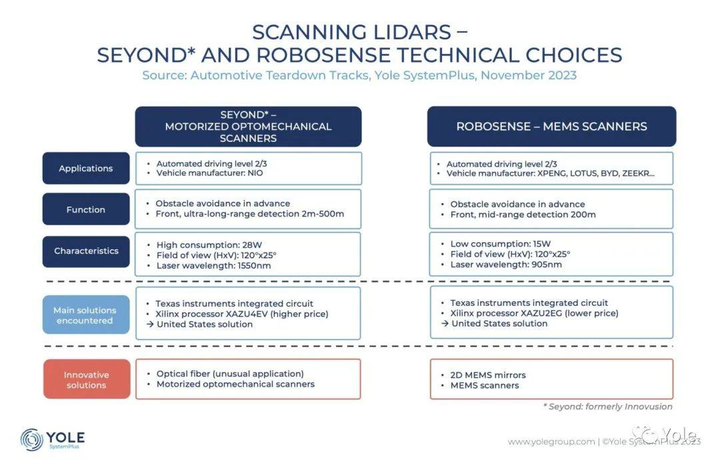
以下将图达通方案和速腾M1 MEMS振镜方案进行了对比
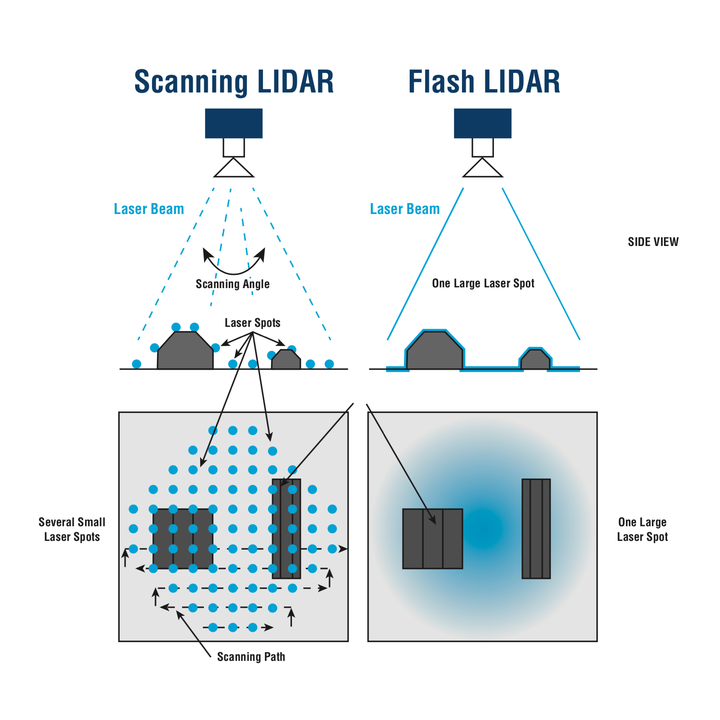
6、Flash Lidar
Flash激光雷达从原理上类似于摄像头,不同点在于Flash激光雷达接收其发射的主动光,而摄像头是接收环境反射的被动光,所以Flash激光雷达多了一个发射模块。
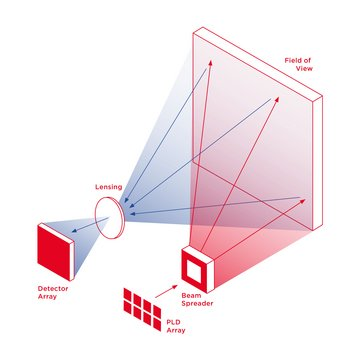
Flash 激光雷达每个像素点可以记录光子飞行时间信息。发射的面阵激光照射到目标上,由于物体具有三维空间属性,从而不同部位的光所反射的光具有不同的飞行时间,被焦平面探测器阵列探测,根据飞行时间不同绘制图像。

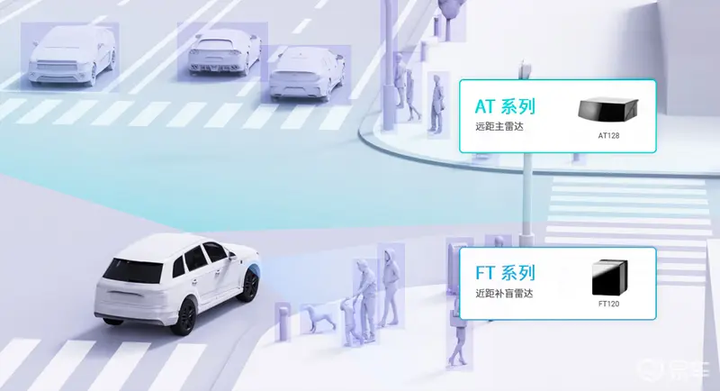
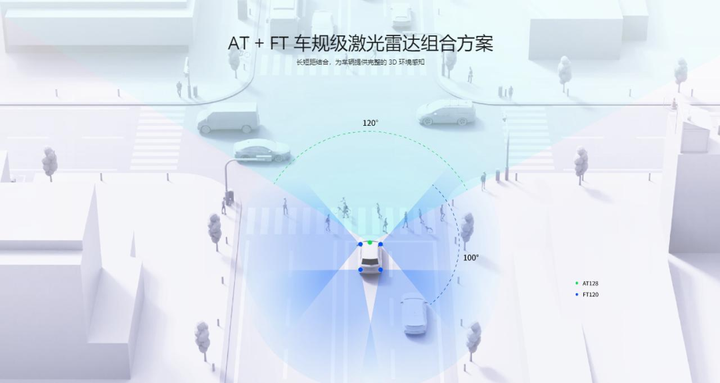
FT120是一款专为量产乘用车近距补盲打造的纯固态激光雷达,其其拥有 100° x 75° 超广角视场和零盲区的优势,最大量程为 100 米,既能够感知到高处的路牌、栏杆、立体车库夹层等,也可以探测到低矮的孩童、宠物、锥桶、斑马线等。192,000 点/秒的点频 (单回波模式下) 和 160 (H) x 120 (V) 的全局分辨率,让这款激光雷达能够探测到丰富的物体细节,实时掌握周边环境信息。

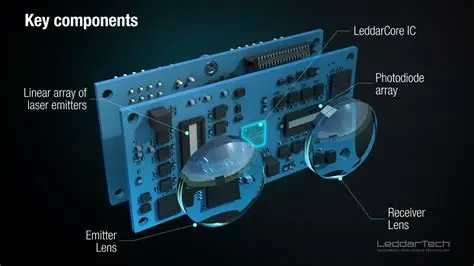
Leddar方案:Linear array光源从上至下依次点亮,形成一个点阵面。
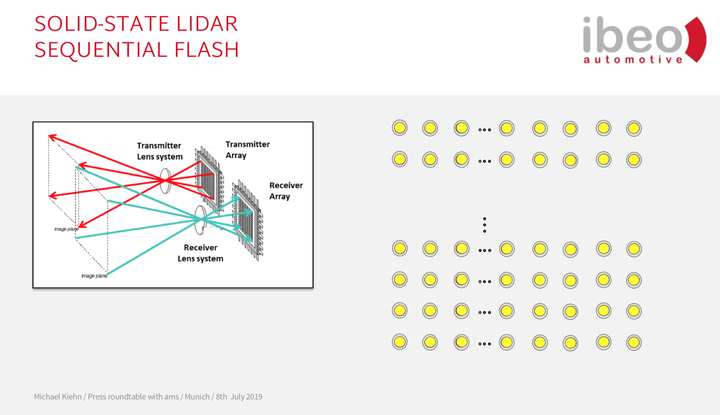
Ibeo激光器逐列扫描环境。具体而言在某些情况下,序列可以被改变或随机化。
传感器通过布置VCSEL的垂直腔面发射激光器来实现其高分辨率)。它是一个128列100行的红外激光源阵列。这些激光源被逐列多路复用,然后反射的光束被接收为点云,从中计算出周围环境的图像。这些VCSEL由ams以及相应的驱动器电路提供。
Ref:VCSEL array as core component for Ibeo's solid-state lidar ...
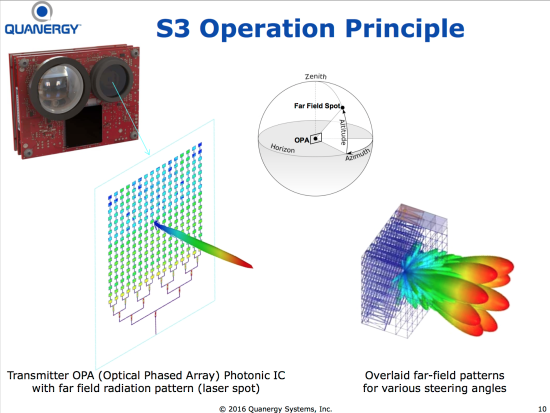
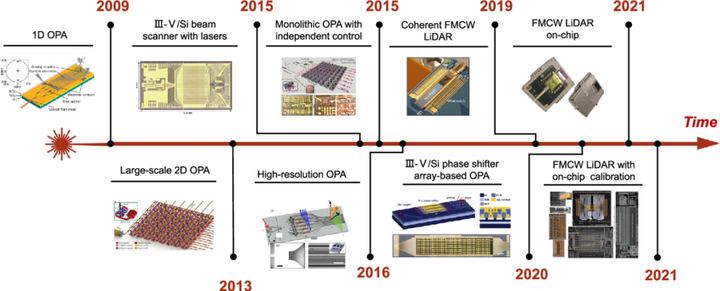
7、OPA Lidar
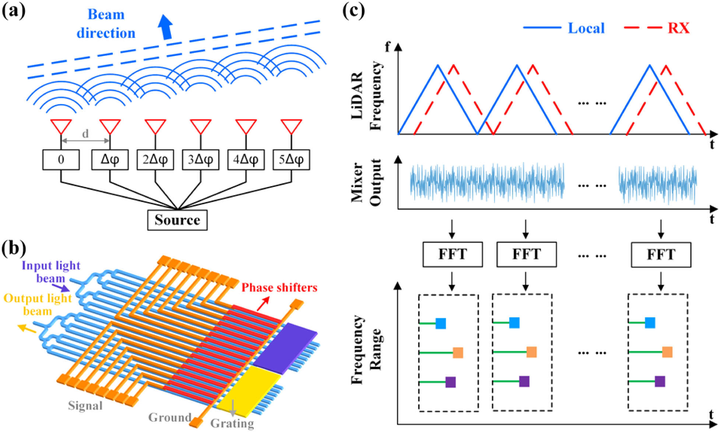
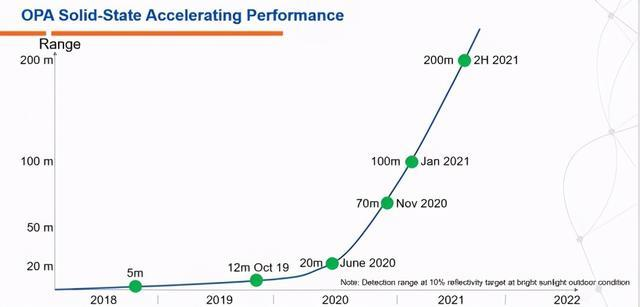
Quanergy公司发布了最新固态激光雷达,在兼容cmos的硅光子集成电路(PIC)中使用光学相控阵(OPA)。Quanergy已经展示了100米的射程,并计划在今年年底前实现200米射程。
由于没有运动部件,基于OPA的固态激光雷达比机械激光雷达更耐用和可靠。此外,它还允许快速扫描,体积小,价格更低。
Ref:Target-adaptive optical phased array lidar | Photonics Research -- 中国光学期刊网

技术共进,成长同行——讯飞AI开发者社区
更多推荐
 36
36 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)