
【具有可变遗忘因子的离散卡尔曼滤波器】如果传感器输出的噪声具有不同的特征,则使用具有可变遗忘因子的离散卡尔曼滤波器来消除噪声研究(Matlab代码实现)
💥💥💞💞❤️❤️💥💥博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。⛳️行百里者,半于九十。📋📋📋🎁🎁🎁。
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
具有可变遗忘因子的离散卡尔曼滤波器在消除传感器噪声中的应用研究
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
具有可变遗忘因子的离散卡尔曼滤波器在消除传感器噪声中的应用研究
一、引言
传感器输出的噪声往往具有不同的特征,如频率、幅度和相位等,这些噪声特征会对传感器的测量精度和系统的性能产生负面影响。为了消除这些噪声,提高传感器的测量精度,本研究引入了具有可变遗忘因子的离散卡尔曼滤波器。卡尔曼滤波器作为一种经典的线性最优估计方法,在噪声处理中表现出色,而可变遗忘因子的引入能够进一步增强其适应性和滤波效果。
二、卡尔曼滤波器原理
卡尔曼滤波器是一种递归算法,利用系统状态的先验信息和当前的观测信息来估计系统状态的最佳估计。其核心思想在于,通过预测和更新两个步骤,不断逼近系统的真实状态。
- 预测步:根据上一时刻的状态和系统模型预测当前时刻的状态,并更新其协方差矩阵。
- 更新步:使用观测值和预测的状态,计算残差和卡尔曼增益,然后更新状态估计和协方差矩阵。
三、可变遗忘因子的引入
在实际应用中,由于系统模型的不确定性、噪声的非平稳性以及目标机动等因素的影响,传统的固定参数卡尔曼滤波器往往难以获得理想的滤波效果。因此,本研究引入了可变遗忘因子,以动态调整滤波器的权重,提高滤波器的适应性。
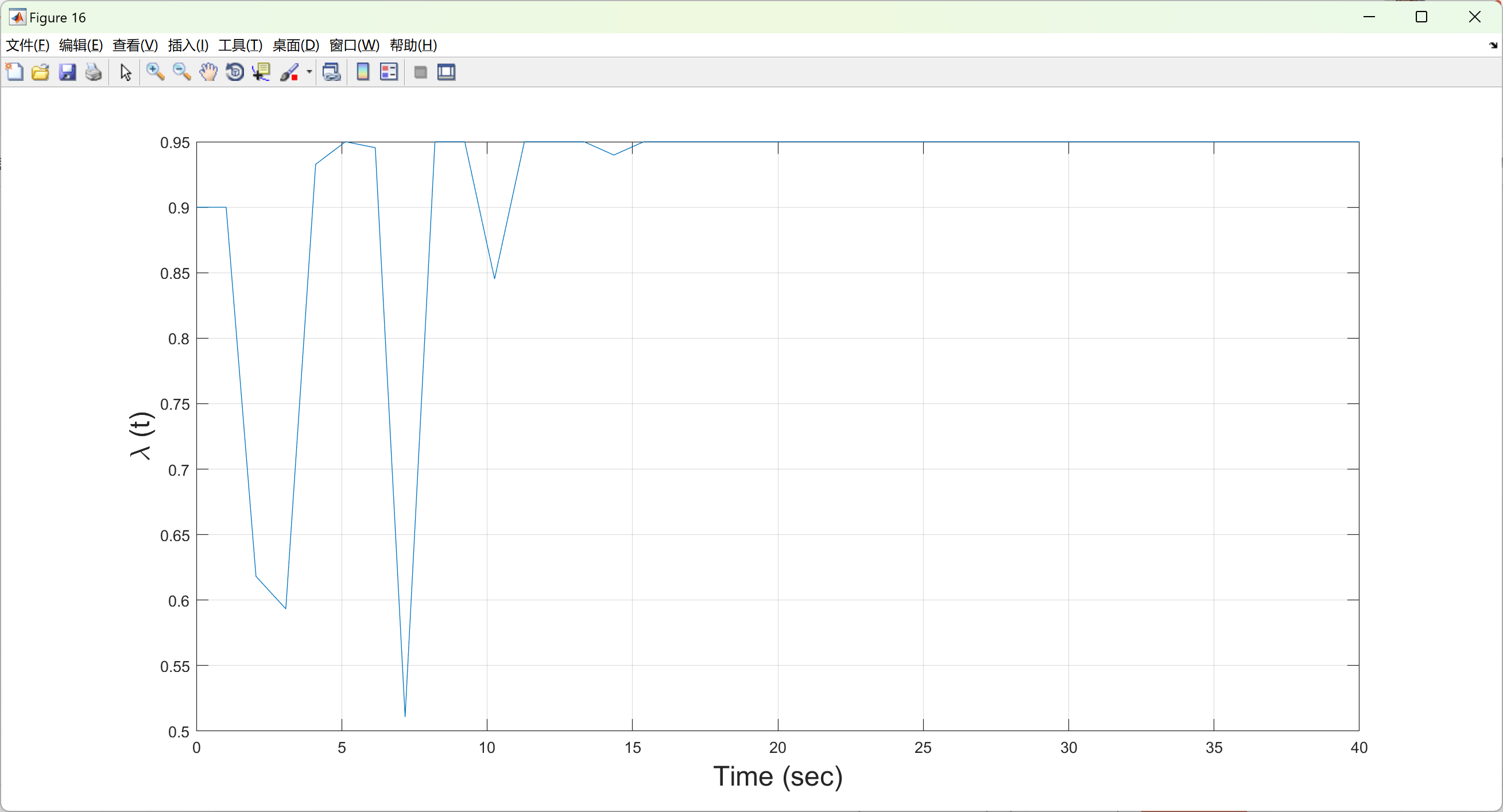
- 遗忘因子的作用:遗忘因子λ(k)的取值范围为(0,1],其值越小,对历史数据的权重越低,对当前数据的权重越高,从而能够更快地跟踪系统的变化。
- 可变遗忘因子的确定:一种常用的方法是基于残差的创新方差来确定遗忘因子。当残差较大时,说明目标可能发生了机动或噪声特征发生了变化,此时应减小遗忘因子,赋予新的测量值更大的权重;当残差较小时,说明系统状态相对稳定,此时应增大遗忘因子,保持滤波器的稳定性。
四、具有可变遗忘因子的离散卡尔曼滤波器设计
- 系统模型建立:根据传感器的特性和应用场景,建立系统的状态空间模型,包括状态转移矩阵、观测矩阵、过程噪声和测量噪声等。
- 滤波器初始化:设置初始的状态估计、协方差矩阵以及遗忘因子的初始值。
- 滤波器递推过程:在每个时间步长内,按照卡尔曼滤波器的预测和更新步骤进行递推计算,同时根据当前的残差动态调整遗忘因子的值。
- 滤波效果评估:通过比较滤波前后的信号质量,评估滤波器的性能。
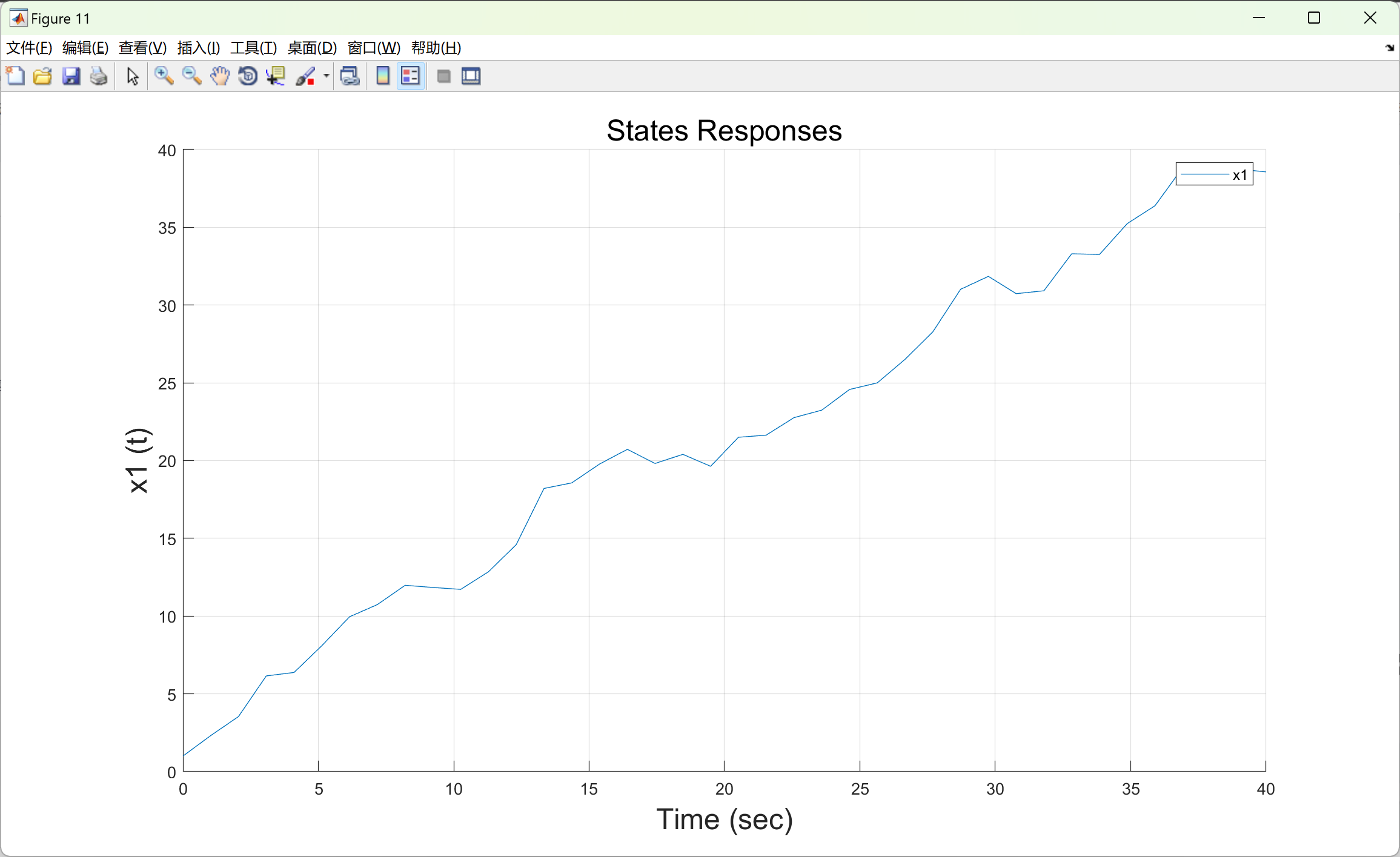
五、仿真实验与结果分析
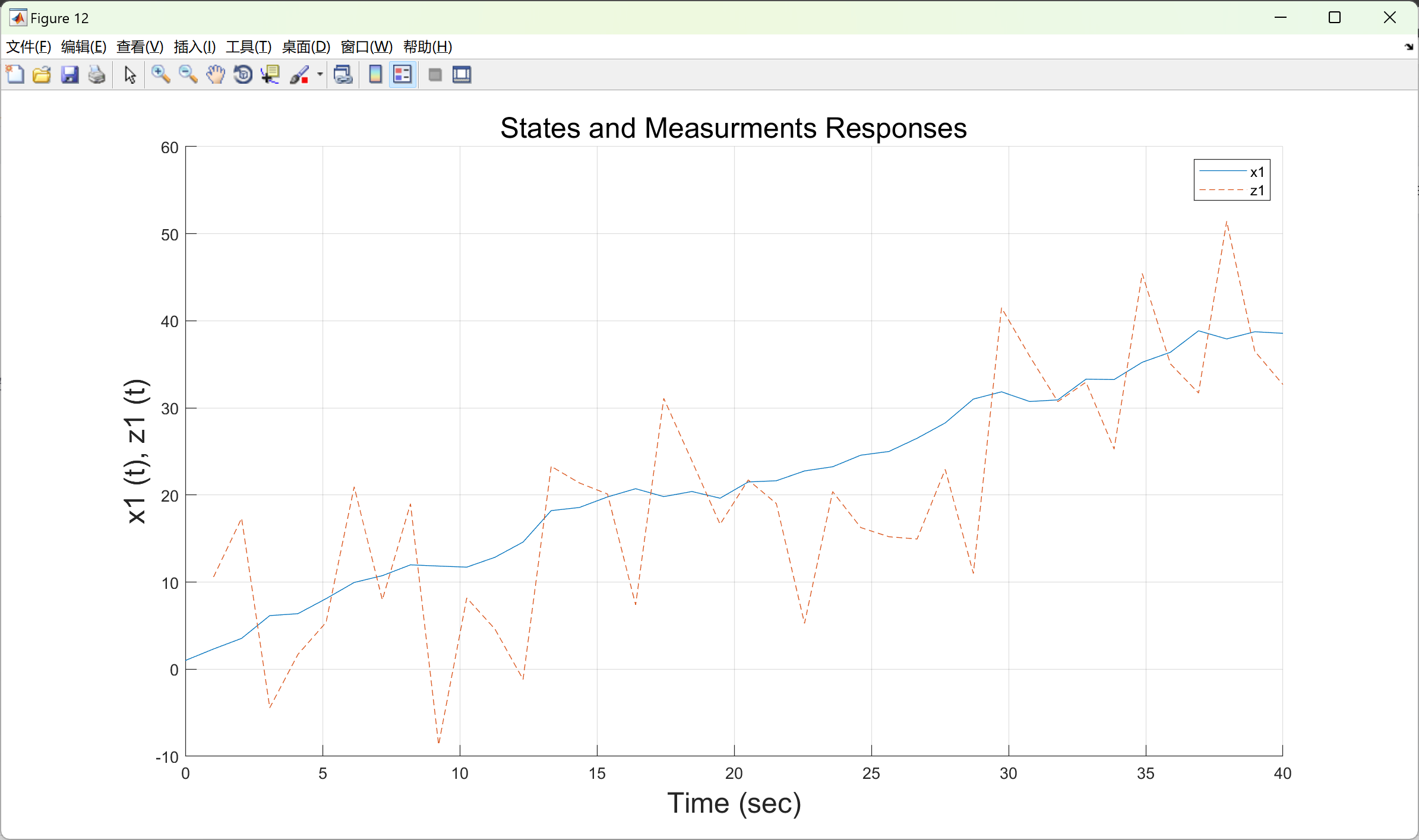
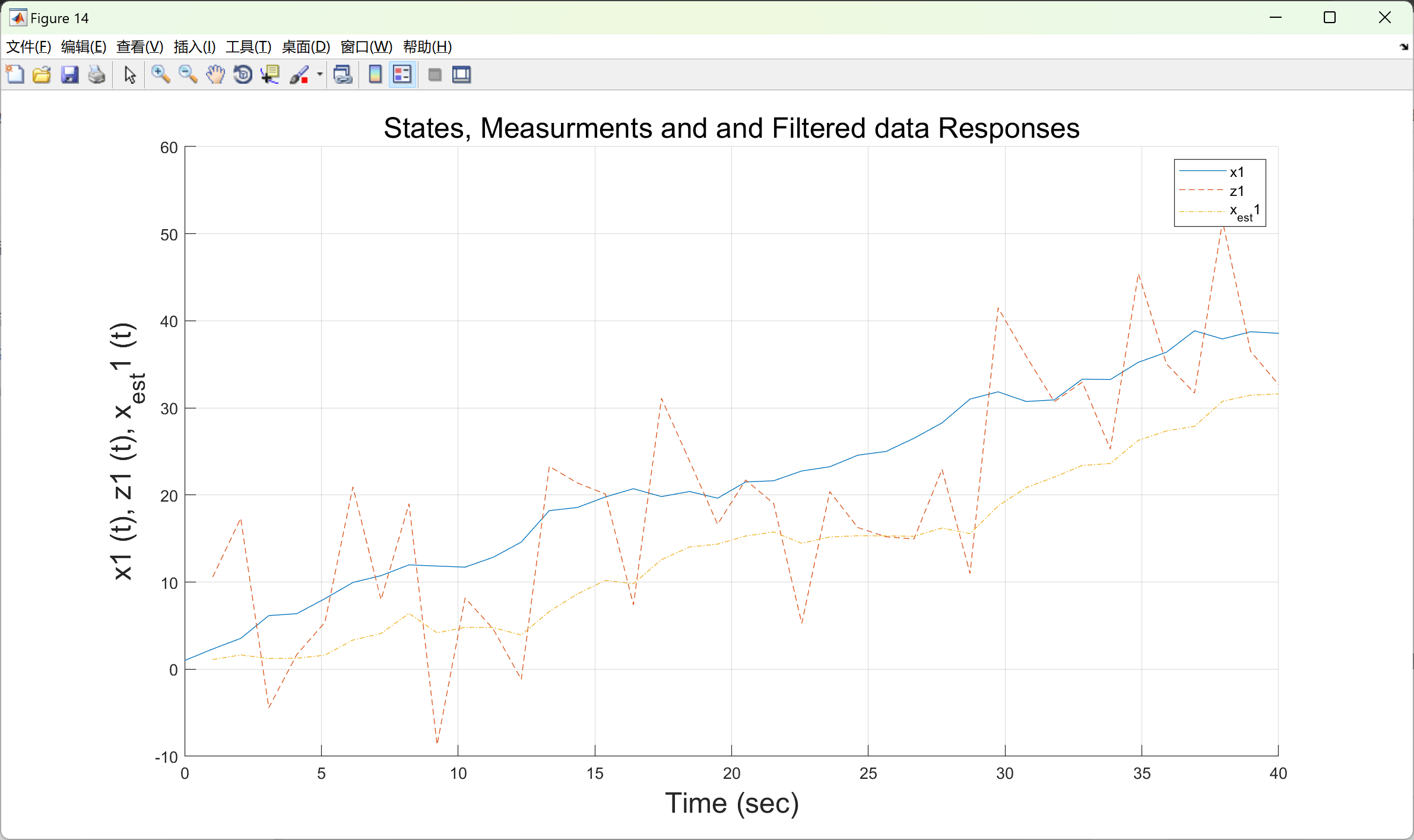
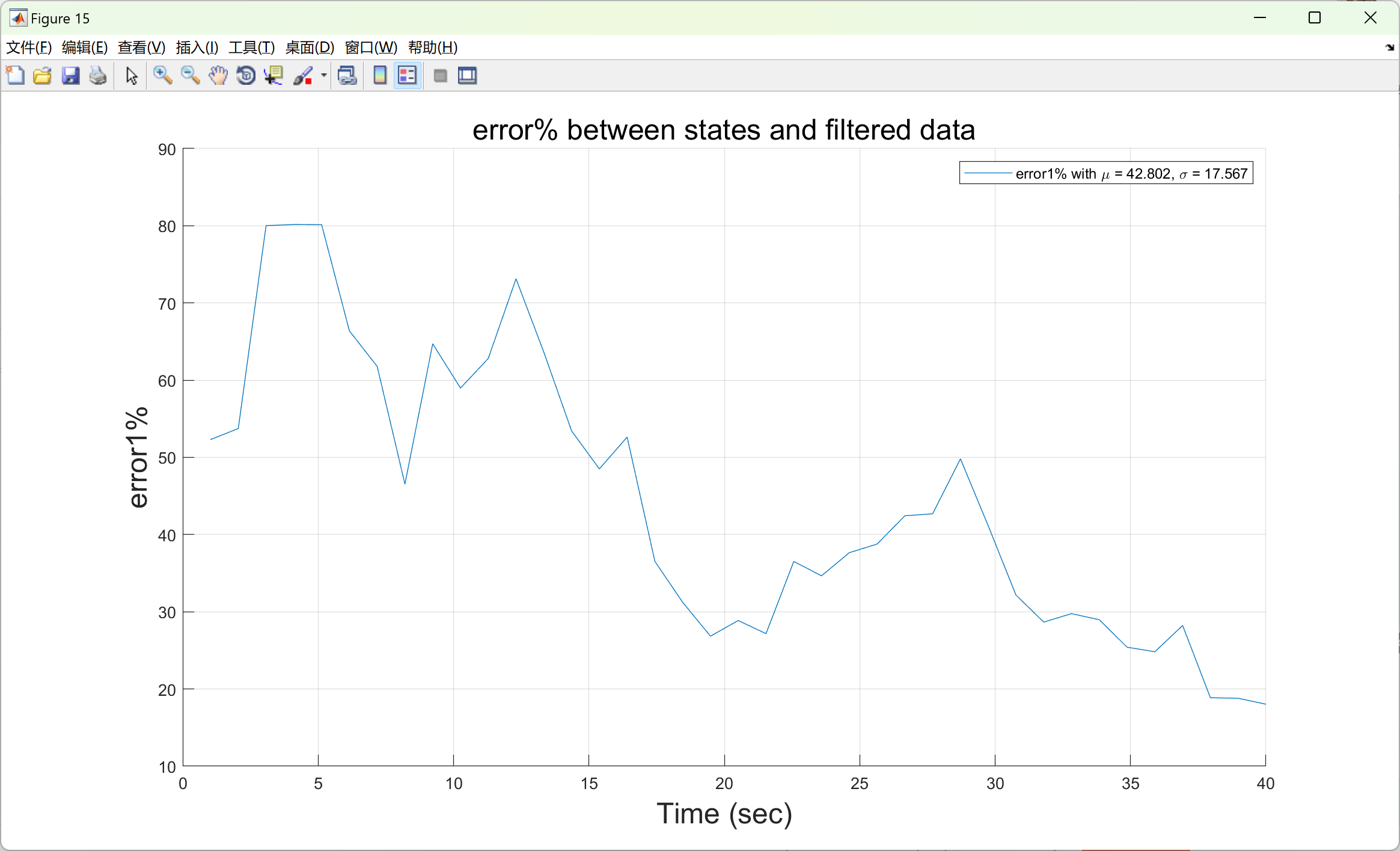
为了验证具有可变遗忘因子的离散卡尔曼滤波器的有效性,本研究进行了仿真实验。实验采用了一个模拟的传感器输出信号,该信号包含多种不同特征的噪声。通过对比固定遗忘因子和可变遗忘因子的滤波效果,发现可变遗忘因子能够更好地适应噪声特征的变化,提高滤波器的性能和稳定性。
- 实验设置:模拟一个包含多种噪声特征的传感器输出信号,设置不同的遗忘因子更新策略。
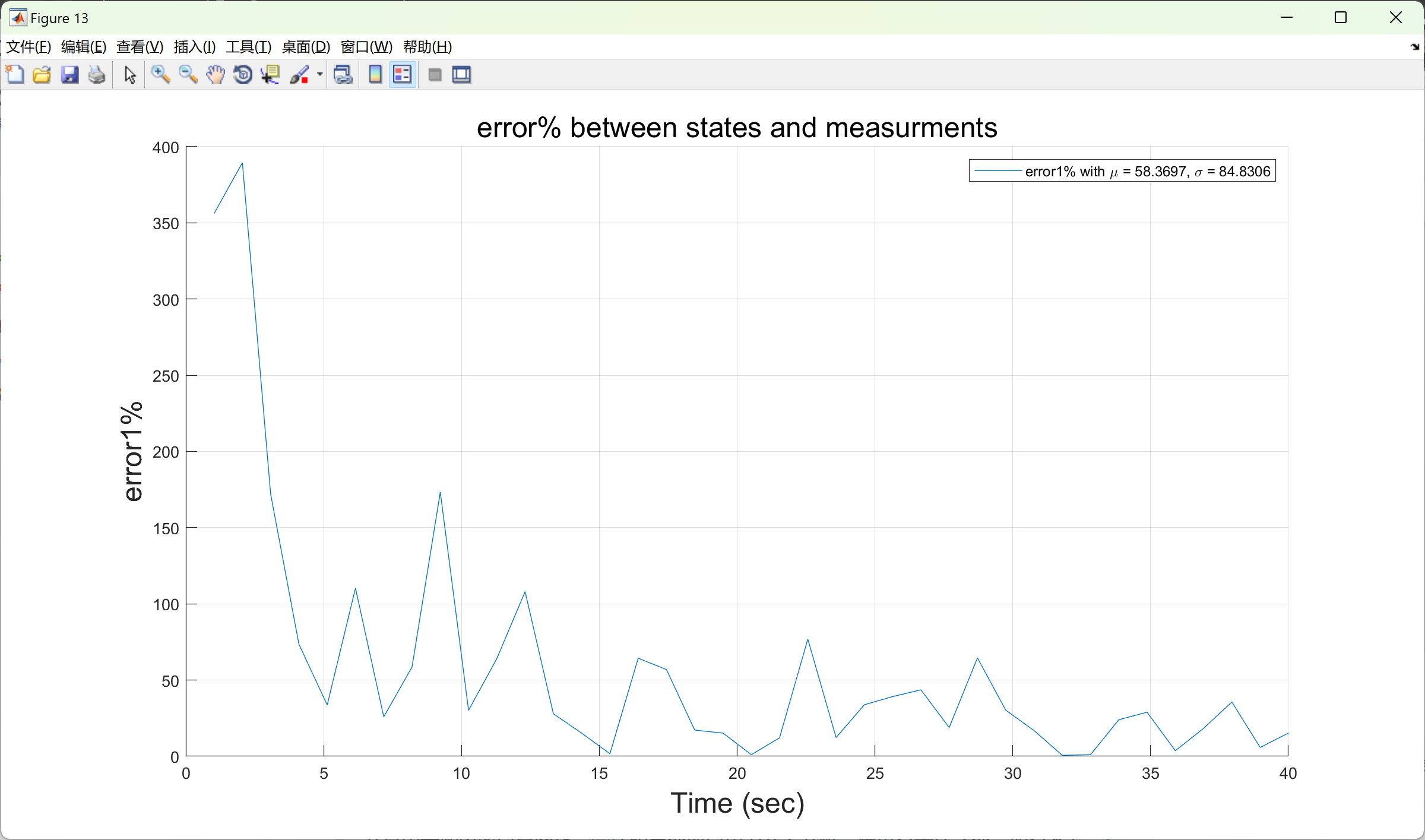
- 实验结果:对比固定遗忘因子和可变遗忘因子的滤波效果,包括信号的信噪比、均方误差等指标。
- 结果分析:分析不同遗忘因子更新策略对滤波效果的影响,以及可变遗忘因子在不同噪声特征下的适应性。
六、结论与展望
本研究设计了一种具有可变遗忘因子的离散卡尔曼滤波器,用于消除传感器输出的不同特征噪声。通过仿真实验验证,该滤波器能够有效地提高传感器的测量精度和系统的性能。未来,可以进一步探索更有效的遗忘因子更新策略,以及将该算法扩展到非线性系统和非高斯噪声等更复杂的情况。
📚2 运行结果
部分代码:
function [ x_estimated ] = DKFwithVaryingForgettingFactor ( x, Time, phi, H, Z, x_hat0_min, P0_min, R, Q, lambda_s, Plot )
%{
This function is used to estimate the the true state from noise measurements by
Discret Kalman filter (DKF) with constant values of variance of measurement error matrix
and variance of Process model noise matrix and variable Forgetting Factor
Process Model :
x(k+1) = phi(k) * x(k) + w(k)
Measurement noise
z(k) = H(k) * x(k) + v(k)
Where :
x(k) = n x 1 state vector at t(k)
phi(k) = n x m state-transition matrix at t(k)
z(k) = m x 1 measurement vector at t(k)
H(k) = m x n measurement matrix at t(k)
%}
%% inputs
% x : matrix of Process Model states
% Time : Time vector of simulation
% phi : state-transition matrix
% H : measurement matrix
% Z : measurement matrix at t(k)
% x_hat0_min : initial conditions
% P0_min :initial error covariance matrix
% R : variance of measurement error matrix
% Q : variance of Process model noise
% lambda_s : initial forgetting factor
% Plot : used to get the plot of system parameter estimation
% 1 - if Plot = 0 --> no plot needed
% 2- if Plot = 1 --> plot needed and Plot(2:7) == figuires number
%% outputs
% x_estimated : the estimated states by DKF
%% function body
%% DKF
P_min{1}=P0_min;
x_hat_min{1}=x_hat0_min;
lambda(1:2)=lambda_s;
for i=1:length(Z)
%% Calculate the gain
K{i}=P_min{i}*H'*inv(H*P_min{i}*H'+R*lambda(i));
%% Update estimate
x_hat_p{i}=x_hat_min{i}+K{i}*(Z(i)-H*x_hat_min{i});
%% Update error
P_p{i}=(eye(length(H(1,:)))-K{i}*H)*P_min{i}/lambda(i);
%% Project ahead
x_hat_min{i+1}=phi*x_hat_p{i};
P_min{i+1}=phi*P_p{i}*phi'+Q;
P_min{i+1}=(P_min{i+1}+P_min{i+1}')/2;
%% lambda
epslon(i)=(Z(i)-H*x_hat_p{i});
if i >= 2
lambda(i+1)=1-(1-x_hat_p{i}'*K{i})*epslon(i)^2/(std(epslon)^2*mean(epslon));
if lambda(i+1) >= 0.95
lambda(i+1) = 0.95;
end
if lambda(i+1) <= 0.3
lambda(i+1) = 0.3;
end
end
end
x_estimated=cell2mat(x_hat_p);
%% Plotting
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]张金良.基于卡尔曼滤波算法的感应电机无传感器直接转矩控制技术研究[J].华南理工大学, 2016.
[2]赖志路.改进的扩展卡尔曼滤波和粒子滤波在时变结构系统识别与损伤在线诊断的研究[D].厦门大学,2013.
🌈4 Matlab代码、文档下载
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


技术共进,成长同行——讯飞AI开发者社区
更多推荐

 24
24 0
0- 0



 已为社区贡献74条内容
已为社区贡献74条内容

所有评论(0)