
基于EtherCAT Igh Master 带轴运行代码样例
基于EtherCATigh 1.6.2版本带载一台高创BD3E伺服和电机,实现EtherCAT总线带轴运行的代码样例,包括了代码和编译运行。
·
一、样例描述
本样例是基于EtherCAT igh 1.6.2版本带载一台高创BD3E伺服,编码器精度为17位,对应电机每转所需指令数为131072个,测试运行代码文件为servoctrl.c,后面描述了如何编译运行。
二、软件环境
1. EtherCAT igh 1.6.2 下载路径:EtherLab / EtherCAT Master · GitLab
2. linux环境:X86 环境 ubuntu20.04 + preempt rt + kernel 5.10
三、代码样例
测试运行代码文件为servoctrl.c
#include <errno.h>
#include <math.h>
#include <pthread.h>
#include <signal.h>
#include <stdio.h>
#include <string.h>
#include <sys/mman.h>
#include <sys/resource.h>
#include <sys/time.h>
#include <sys/types.h>
#include <time.h>
#include <unistd.h>
#include "ecrt.h"
#define false 0
#define true 1
#define RUNTIME_MS 60000 // 60s
#define PERIOD_NS 4000000 // 4ms
#define PERIOD_MS (PERIOD_NS / 1000000)
#define ETHERCAT_STATUS_OP 0x08
#define STATUS_SERVO_ENABLE_BIT (0x04)
// master status
typedef enum _SysWorkingStatus
{
SYS_WORKING_POWER_ON,
SYS_WORKING_SAFE_MODE,
SYS_WORKING_OP_MODE,
SYS_WORKING_LINK_DOWN,
SYS_WORKING_IDLE_STATUS // 系统空闲
} SysWorkingStatus;
typedef struct _GSysRunningParm
{
SysWorkingStatus m_gWorkStatus;
} GSysRunningParm;
GSysRunningParm gSysRunning;
pthread_t InterpolationTask;
int run = 1;
int ecstate = 0;
#define CLOCK_TO_USE CLOCK_REALTIME
#define NSEC_PER_SEC (1000000000L)
#define TIMESPEC2NS(T) ((uint64_t)(T).tv_sec * NSEC_PER_SEC + (T).tv_nsec)
static int64_t system_time_base = 0LL;
// 获取当前系统时间
uint64_t system_time_ns(void)
{
struct timespec rt_time;
clock_gettime(CLOCK_TO_USE, &rt_time);
uint64_t time = TIMESPEC2NS(rt_time);
return time - system_time_base;
}
/****************************************************************************/
// EtherCAT
ec_master_t *master = NULL;
static ec_master_state_t master_state = {};
static ec_domain_t *domainServoInput = NULL;
static ec_domain_state_t domainServoInput_state = {};
static ec_domain_t *domainServoOutput = NULL;
static ec_domain_state_t domainServoOutput_state = {};
static uint8_t *domainOutput_pd = NULL;
static uint8_t *domainInput_pd = NULL;
static ec_slave_config_t *sc_bd3e;
static ec_slave_config_state_t sc_bd3e_state;
/****************************************************************************/
#define bd3e_Pos0 0, 0
#define bd3e 0x2E1, 0xBE2ED
// offsets for PDO entries
static unsigned int cntlwd;
static unsigned int ipData;
static unsigned int modes_of_operation;
static unsigned int status;
static unsigned int actpos;
static unsigned int modes_of_operation_display;
static unsigned int Homing_method;
static unsigned int speed_during_search_for_switch;
static unsigned int speed_during_search_for_zero;
static unsigned int homing_acceleration;
static unsigned int home_offset;
static unsigned int cur_status;
static unsigned int cur_mode;
// process data
ec_pdo_entry_reg_t domainServoOutput_regs[] = {
{bd3e_Pos0, bd3e, 0x6040, 0x00, &cntlwd, NULL},
{bd3e_Pos0, bd3e, 0x607a, 0x00, &ipData, NULL},
{bd3e_Pos0, bd3e, 0x6060, 0x00, &modes_of_operation, NULL}, // 6060 模式选择
{}};
ec_pdo_entry_reg_t domainServoInput_regs[] = {
{bd3e_Pos0, bd3e, 0x6064, 0x00, &actpos, NULL},
{bd3e_Pos0, bd3e, 0x6041, 0x00, &status, NULL},
{bd3e_Pos0, bd3e, 0x6061, 0x00, &modes_of_operation_display, NULL},
{}};
/****************************************************************************/
/* Master 0, Slave 0, "BD3E"
* Vendor ID: 0x000002e1
* Product code: 0xBE2ED
* Revision number: xxx
*/
ec_pdo_entry_info_t bd3e_pdo_entries[] = {
{0x6040, 0x00, 16}, /* Controlword */
{0x6060, 0x00, 8}, /* Modes of operation */
{0x607a, 0x00, 32}, /* Target position */
{0x60b8, 0x00, 16}, /* Touch probe function */
{0x603f, 0x00, 16}, /* Error code */
{0x6041, 0x00, 16}, /* Statusword */
{0x6061, 0x00, 8}, /* Modes of operation display */
{0x6064, 0x00, 32}, /* Position actual value */
{0x60b9, 0x00, 16}, /* Touch probe status */
{0x60ba, 0x00, 32}, /* Touch probe pos1 pos value */
{0x60f4, 0x00, 32}, /* Following error actual value */
{0x60fd, 0x00, 32}, /* Digital inputs */
};
ec_pdo_info_t bd3e_pdos[] = {
{0x1600, 4, bd3e_pdo_entries + 0}, /* Receive PDO mapping 1 */
{0x1a00, 8, bd3e_pdo_entries + 4}, /* Transmit PDO mapping 1 */
};
ec_sync_info_t bd3e_syncs[] = {{0, EC_DIR_OUTPUT, 0, NULL, EC_WD_DISABLE},
{1, EC_DIR_INPUT, 0, NULL, EC_WD_DISABLE},
{2, EC_DIR_OUTPUT, 1, bd3e_pdos + 0, EC_WD_ENABLE},
{3, EC_DIR_INPUT, 1, bd3e_pdos + 1, EC_WD_DISABLE},
{0xff}};
/****************************************************************************/
int ConfigPDO()
{
/********************/
printf("Configuring PDOs...\n");
domainServoOutput = ecrt_master_create_domain(master);
if (!domainServoOutput) {
return -1;
}
domainServoInput = ecrt_master_create_domain(master);
if (!domainServoInput) {
return -1;
}
/********************/
printf("Creating slave configurations...\n");
sc_bd3e = ecrt_master_slave_config(master, bd3e_Pos0, bd3e);
if (!sc_bd3e) {
fprintf(stderr, "Failed to get slave configuration.\n");
return -1;
}
/********************/
if (ecrt_slave_config_pdos(sc_bd3e, EC_END, bd3e_syncs)) {
fprintf(stderr, "Failed to configure PDOs.\n");
return -1;
}
/********************/
if (ecrt_domain_reg_pdo_entry_list(domainServoOutput, domainServoOutput_regs)) {
fprintf(stderr, "PDO entry registration failed!\n");
return -1;
}
if (ecrt_domain_reg_pdo_entry_list(domainServoInput, domainServoInput_regs)) {
fprintf(stderr, "PDO entry registration failed!\n");
return -1;
}
fprintf(stderr, "Creating SDO requests...\n");
ecrt_slave_config_sdo8(sc_bd3e, 0x6060, 0, 8);
return 0;
}
/*****************************************************************************
* Realtime task
****************************************************************************/
void rt_check_domain_state(void)
{
ec_domain_state_t ds = {};
ec_domain_state_t ds1 = {};
// domainServoInput
ecrt_domain_state(domainServoInput, &ds);
if (ds.working_counter != domainServoInput_state.working_counter) {
printf("domainServoInput: WC %u.\n", ds.working_counter);
}
if (ds.wc_state != domainServoInput_state.wc_state) {
printf("domainServoInput: State %u.\n", ds.wc_state);
}
domainServoInput_state = ds;
// domainServoOutput
ecrt_domain_state(domainServoOutput, &ds1);
if (ds1.working_counter != domainServoOutput_state.working_counter) {
printf("domainServoOutput: WC %u.\n", ds1.working_counter);
}
if (ds1.wc_state != domainServoOutput_state.wc_state) {
printf("domainServoOutput: State %u.\n", ds1.wc_state);
}
domainServoOutput_state = ds1;
}
/****************************************************************************/
void rt_check_master_state(void)
{
ec_master_state_t ms;
ecrt_master_state(master, &ms);
if (ms.slaves_responding != master_state.slaves_responding) {
printf("%u slave(s).\n", ms.slaves_responding);
}
if (ms.al_states != master_state.al_states) {
printf("AL states: 0x%02X.\n", ms.al_states);
}
if (ms.link_up != master_state.link_up) {
printf("Link is %s.\n", ms.link_up ? "up" : "down");
}
master_state = ms;
}
/****************************************************************************/
void check_slave_config_states(void)
{
ec_slave_config_state_t s;
ecrt_slave_config_state(sc_bd3e, &s);
if (s.al_state != sc_bd3e_state.al_state)
printf("sc_bd3e_state: State 0x%02X.\n", s.al_state);
if (s.online != sc_bd3e_state.online)
printf("sc_bd3e_state: %s.\n", s.online ? "online" : "offline");
if (s.operational != sc_bd3e_state.operational)
printf("sc_bd3e_state: %soperational.\n", s.operational ? "" : "Not ");
sc_bd3e_state = s;
}
/****************************************************************************/
void ReleaseMaster()
{
if (master) {
printf("End of Program, release master\n");
ecrt_release_master(master);
master = NULL;
}
}
/****************************************************************************/
int ActivateMaster()
{
int ret;
printf("Requesting master...\n");
if (master)
return 0;
master = ecrt_request_master(0);
if (!master) {
return -1;
}
ConfigPDO();
// configure SYNC signals for this slave
ecrt_slave_config_dc(sc_bd3e, 0x0300, PERIOD_NS, 0, 0, 0);
ecrt_master_application_time(master, system_time_ns());
ret = ecrt_master_select_reference_clock(master, NULL);
if (ret < 0) {
fprintf(stderr, "Failed to select reference clock: %s\n", strerror(-ret));
return ret;
}
/********************/
printf("Activating master...\n");
if (ecrt_master_activate(master)) {
printf("Activating master...failed\n");
return -1;
}
/********************/
if (!(domainInput_pd = ecrt_domain_data(domainServoInput))) {
fprintf(stderr, "Failed to get domain data pointer.\n");
return -1;
}
if (!(domainOutput_pd = ecrt_domain_data(domainServoOutput))) {
fprintf(stderr, "Failed to get domain data pointer.\n");
return -1;
}
printf("Activating master...success\n");
return 0;
}
/****************************************************************************/
void DriverEtherCAT()
{
static int act_encoder = 0;
static int curpos = 0;
static int curpos_offset = 0;
static int i = 0;
// 处于刚开机(需要等待其他操作完成),返回等待下次周期
if (gSysRunning.m_gWorkStatus == SYS_WORKING_POWER_ON)
return;
static int cycle_counter = 0;
cycle_counter++;
int runtime_tick = 0;
if (PERIOD_MS > 0) {
runtime_tick = RUNTIME_MS / PERIOD_MS;
} else {
runtime_tick = 10000;
}
if (cycle_counter >= runtime_tick) {
cycle_counter = 0;
run = 0;
}
// receive EtherCAT frames
ecrt_master_receive(master);
ecrt_domain_process(domainServoOutput);
ecrt_domain_process(domainServoInput);
rt_check_domain_state();
if ((cycle_counter % 500) == 0) {
rt_check_master_state();
check_slave_config_states();
}
// 状态机操作
switch (gSysRunning.m_gWorkStatus) {
case SYS_WORKING_SAFE_MODE:
// 检查主站是否处于 OP 模式, 若不是,则调整为 OP 模式
rt_check_master_state();
check_slave_config_states();
if ((master_state.al_states & ETHERCAT_STATUS_OP)) {
int tmp = true;
if (sc_bd3e_state.al_state != ETHERCAT_STATUS_OP) {
tmp = false;
break;
}
if (tmp) {
ecstate = 0;
gSysRunning.m_gWorkStatus = SYS_WORKING_OP_MODE;
printf("SYS_WORKING_OP_MODE\n");
EC_WRITE_U16(domainOutput_pd + cntlwd, 0x80); // 错误复位
}
}
break;
case SYS_WORKING_OP_MODE:
EC_WRITE_U8(domainOutput_pd + modes_of_operation, 8);
cur_mode = EC_READ_U8(domainInput_pd + modes_of_operation_display);
cur_status = EC_READ_U16(domainInput_pd + status);
if ((cur_status & 0x004f) == 0x0040) {
EC_WRITE_U16(domainOutput_pd + cntlwd, 0x06);
cur_mode = EC_READ_U8(domainInput_pd + modes_of_operation_display);
} else if ((cur_status & 0x006f) == 0x0021) {
EC_WRITE_U16(domainOutput_pd + cntlwd, 0x07);
} else if ((cur_status & 0x006f) == 0x023) {
EC_WRITE_U16(domainOutput_pd + cntlwd, 0x0F);
curpos = EC_READ_S32(domainInput_pd + actpos);
EC_WRITE_S32(domainOutput_pd + ipData, EC_READ_S32(domainInput_pd + actpos));
} else if ((cur_status & 0x006f) == 0x0027) {
EC_WRITE_U16(domainOutput_pd + cntlwd, 0x001f);
curpos = EC_READ_S32(domainInput_pd + actpos);
EC_WRITE_S32(domainOutput_pd + ipData, curpos);
printf("Axis current position = %d\n", curpos);
int tmp = true;
if ((EC_READ_U16(domainInput_pd + status) & (STATUS_SERVO_ENABLE_BIT)) == 0) {
tmp = false;
break;
}
if (tmp) {
ecstate = 0;
gSysRunning.m_gWorkStatus = SYS_WORKING_IDLE_STATUS;
printf("SYS_WORKING_IDLE_STATUS\n");
}
}
break;
default:
cur_status = EC_READ_U16(domainInput_pd + status);
act_encoder = EC_READ_S32(domainInput_pd + actpos);
if ((cycle_counter % 250) == 0) {
printf("curpos = %d, act_encoder=%d\t", curpos, act_encoder);
}
// 电机1转所需131072 cmd
// 1 (转/s) <--> 131072 (cmd/s) <--> 131072/1000 (cmd /ms) <--> 131072 / 1000 * PERIOD_NS / 1000000 (cmd / T)
// 若需电机每秒1转情况下,则每周期的位置增量为delt = 131072 / 1000 * 4000000 / 1000000 = 524 cmd
curpos += 524;
EC_WRITE_S32(domainOutput_pd + ipData, curpos);
break;
}
// write application time to master
ecrt_master_application_time(master, system_time_ns());
ecrt_master_sync_reference_clock(master);
ecrt_master_sync_slave_clocks(master);
// send process data
ecrt_domain_queue(domainServoOutput);
ecrt_domain_queue(domainServoInput);
ecrt_master_send(master);
}
/****************************************************************************/
void *InterpolationThread(void *arg)
{
struct timespec wait, previous;
clock_gettime(CLOCK_REALTIME, &previous);
wait = previous;
while (run) {
wait.tv_nsec += PERIOD_NS; // 4ms
if (wait.tv_nsec >= NSEC_PER_SEC) {
wait.tv_sec++;
wait.tv_nsec -= NSEC_PER_SEC;
}
// Delay the calling task (absolute). Delay the execution of the calling task until a given
// date is reached.
clock_nanosleep(CLOCK_REALTIME, TIMER_ABSTIME, &wait, NULL);
DriverEtherCAT();
}
return NULL;
}
/****************************************************************************
* Signal handler
***************************************************************************/
void signal_handler(int sig)
{
run = 0;
}
/****************************************************************************
* Main function
***************************************************************************/
int main(int argc, char *argv[])
{
int ret;
signal(SIGTERM, signal_handler);
signal(SIGINT, signal_handler);
mlockall(MCL_CURRENT | MCL_FUTURE);
gSysRunning.m_gWorkStatus = SYS_WORKING_POWER_ON;
if (gSysRunning.m_gWorkStatus == SYS_WORKING_POWER_ON) {
ActivateMaster();
ecstate = 0;
gSysRunning.m_gWorkStatus = SYS_WORKING_SAFE_MODE;
printf("SYS_WORKING_SAFE_MODE\n");
}
pthread_attr_t attr;
struct sched_param param;
pthread_attr_init(&attr);
pthread_attr_setschedpolicy(&attr, SCHED_FIFO);
param.sched_priority = 99;
pthread_attr_setschedparam(&attr, ¶m);
pthread_attr_setinheritsched(&attr, PTHREAD_EXPLICIT_SCHED);
ret = pthread_create(&InterpolationTask, &attr, InterpolationThread, NULL);
if (ret) {
fprintf(stderr, "Failed to create task: %s\n", strerror(ret));
return -1;
}
printf("Starting InterpolationTask...\n");
while (run) {
usleep(50000);
}
printf("Deleting realtime InterpolationTask task...\n");
pthread_join(InterpolationTask, NULL);
ReleaseMaster();
return 0;
}
代码编译过程如下:
gcc servoctrl.c -o servoctrl -lpthread -lrt -lethercat
其中ethercat lib库为igh编译后的libethercat.so libethercat.so.1,这些库已经编译后拷贝到了/usr/lib,所以可以直接链接lethercat库,否则编译会报错。
代码运行:
sudo ./servoctrl
运行效果如下:
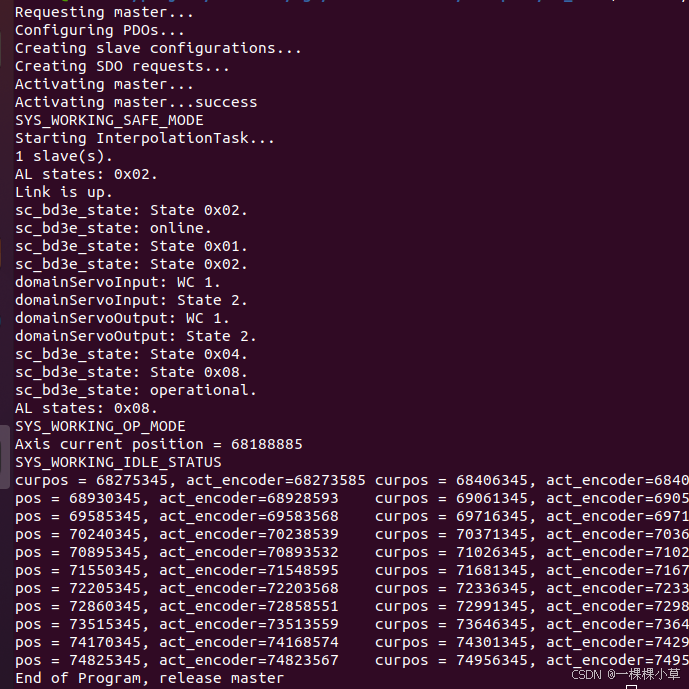
电机表现每秒旋转1圈,运行时间60s。
如果有问题欢迎沟通交流
祝好!

技术共进,成长同行——讯飞AI开发者社区
更多推荐
 11
11 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)