
使用vscode对ROS代码进行debug
因为之前不太经常使用程序进行debug操作。但光看程序,不运行看输入输出只看代码感觉还是不太行,对其的理解不深刻。这个文章算是自己学习debug的一些流程。整体会比较简单。具体更详细的操作可以借鉴这篇博客,其介绍的比较详细。
一、概述
因为之前不太经常使用程序进行debug操作。但光看程序,不运行看输入输出只看代码感觉还是不太行,对其的理解不深刻。这个文章算是自己学习debug的一些流程。
整体会比较简单。
具体更详细的操作可以借鉴这篇博客,其介绍的比较详细。
VScode断点调试ROS_vscode ros 断点调试-CSDN博客
二、具体操作
(一)cmakelist.txt设置
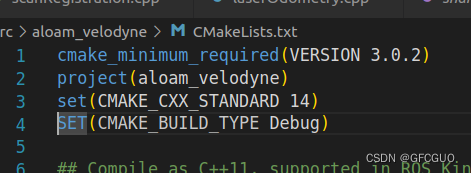
需要重新对cmakelist.txt文件进行设置,在文件最前方填上如下这句。这句的作用是设置debug的模式。如果不设置这个的话,即使后面配置好launch.json文件,设置断点后运行,也不会进入debug模式。
SET(CMAKE_BUILD_TYPE Debug)加上后如图所示。
重新编译整个ros功能包。
(二).vscode配置
因为我们使用vscode进行debug,需要对项目进行配置。
首先,在如下的地方。.vscode下面新建一个文件,文件名叫做launch.json。用于使用launch文件进行debug。
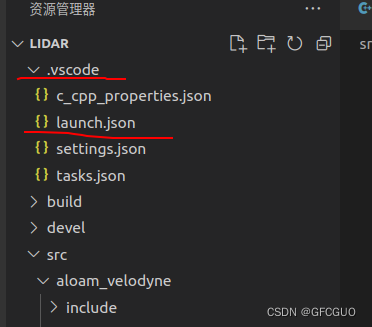
前面提及的那篇博客里面的方法相比较,直接建立一个launch.json文件是最简单的。所以,我直接就建立一个launch.json文件。
建立好之后,需要将原本内容替换为如下内容。
{
// Use IntelliSense to learn about possible attributes.
// Hover to view descriptions of existing attributes.
// For more information, visit: https://go.microsoft.com/fwlink/?linkid=830387
"version": "0.2.0",
"configurations": [
{
"name": "ROS: Launch",
"request": "launch",
"target": "/home/gfc/study_BIT/ros/study/lidar/src/aloam_velodyne/launch/my_test1.launch",
"type": "ros"
}
]
}
需要注意的时,将target替换为自己需要启动的launch文件的路径,保险起见,直接使用全局路径。
完成后,所有配置工作结束。
(三)开始运行
首先,点击下图中红色部分。
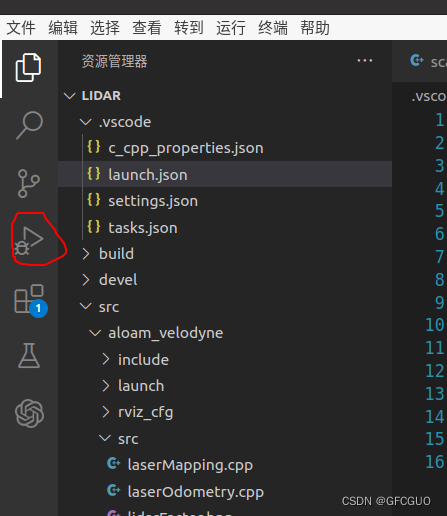
进入后如图所示。
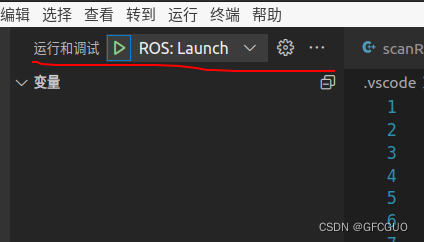
在配置好launch文件后,进入后会直接出现上面那些(在整个页面的左上方)。然后再文件中随意设置一个断点。点击运行即可debug。

技术共进,成长同行——讯飞AI开发者社区
更多推荐


 5
5 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)