
【Astra Pro】奥比中光Astra Pro使用OpenNI2 SDK for ros时,解决启动astra_camera节点出现wait for device to be connected
使用一些版本的ros_astra_camera sdk比如:1.2.1、1.2.0版本时,会出现下面提示:需要重新插拔usb口否则不能连接相机。
一.错误提示:wait for device to be connected
使用一些版本的ros_astra_camera sdk比如:1.2.1、1.2.0版本时,会出现下面提示:
需要重新插拔usb口否则不能连接相机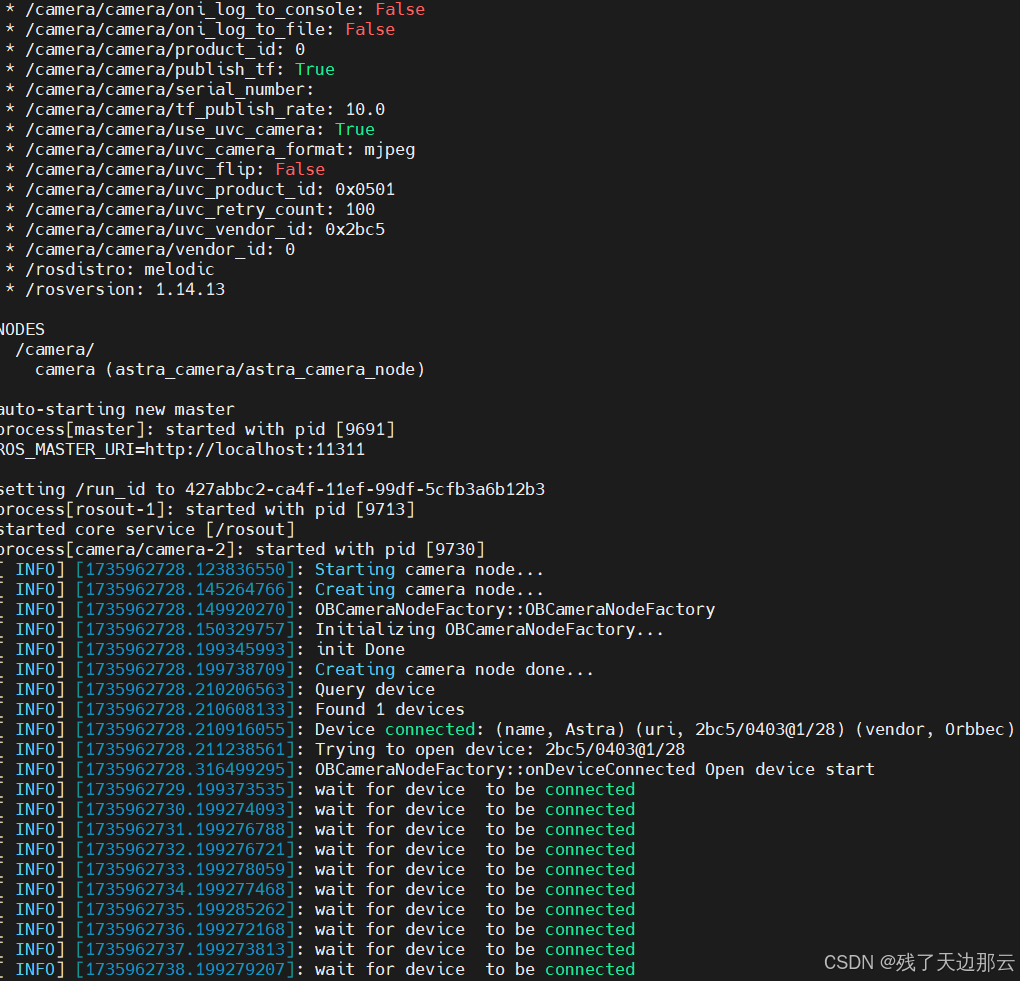 [ INFO] [1735955783.758551746]: Starting camera node…
[ INFO] [1735955783.758551746]: Starting camera node…
[ INFO] [1735955783.779148484]: Creating camera node…
[ INFO] [1735955783.783556282]: OBCameraNodeFactory::OBCameraNodeFactory
[ INFO] [1735955783.783850294]: Initializing OBCameraNodeFactory…
[ INFO] [1735955783.947650434]: init Done
[ INFO] [1735955783.948018614]: Creating camera node done…
[ INFO] [1735955783.958212867]: Query device
[ INFO] [1735955783.958327660]: Found 1 devices
[ INFO] [1735955783.958413025]: Device connected: (name, Astra) (uri, 2bc5/0403@1/16) (vendor, Orbbec)
[ INFO] [1735955783.958470786]: Trying to open device: 2bc5/0403@1/16
[ INFO] [1735955784.058622520]: OBCameraNodeFactory::onDeviceConnected Open device start
[ INFO] [1735955784.947286080]: wait for device to be connected
[ INFO] [1735955785.947195611]: wait for device to be connected
[ INFO] [1735955786.947183194]: wait for device to be connected
[ INFO] [1735955787.947188725]: wait for device to be connected
[ INFO] [1735955788.947187515]: wait for device to be connected
[ INFO] [1735955789.947193939]: wait for device to be connected
二.错误提示:[roscar_control-2] process has died
使用一些版本的ros_astra_camera sdk比如:1.2.2、1.1.4、1.0.9以及更低版本时
使用rviz查看深度彩色图像,或者订阅图像话题时 会出现下面提示:

[roscar_control-2] process has died [pid 6273, exit code -6, cmd /home/nvidia/catkin_ws/devel/lib/roscar_control/roscar_control_node __name:=roscar_control __log:=/home/nvidia/.ros/log/4fc826b8-ca3e-11ef-b5e9-5cfb3a6b12b3/roscar_control-2.log].
log file: /home/nvidia/.ros/log/4fc826b8-ca3e-11ef-b5e9-5cfb3a6b12b3/roscar_control-2*.log
三.解决方法
1.方法一:
重新插拔Astra Pro的usb接口
每次启动相机都需要重新插拔,比较麻烦,一劳永逸的办法请看看方法二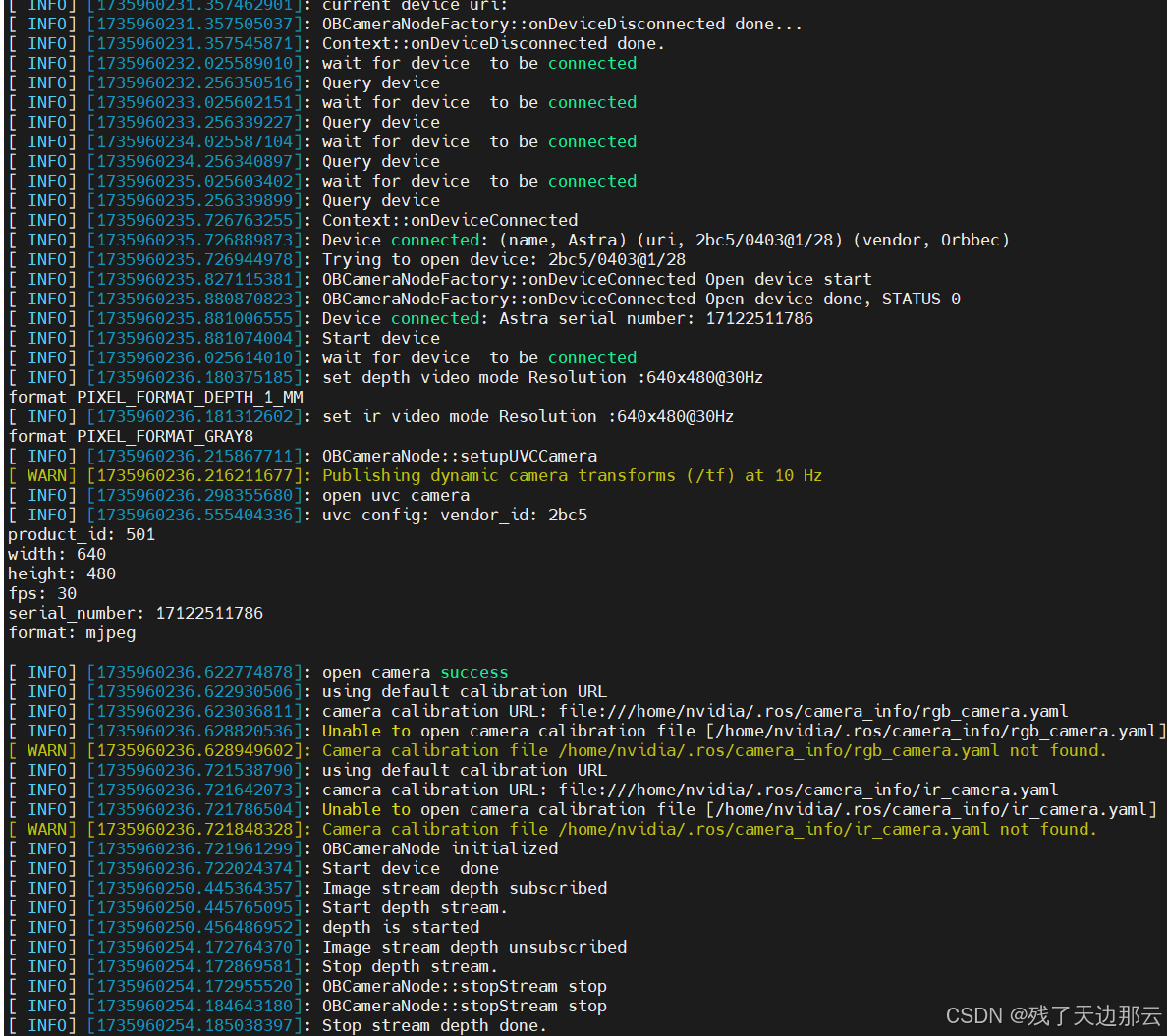
2.方法二:
因为第一种情况重新插拔后可以正常使用查看和订阅astra pro图像话题,需要每次重新插拔;第二种情况每次能自动连接,启动节点,但是不能查看和订阅话题。
我将两者代码结合,在1.2.1版本上修改读取USB部分以及uvc图像读取的源码(99-108行)以及一些库文件后重新编译并通过
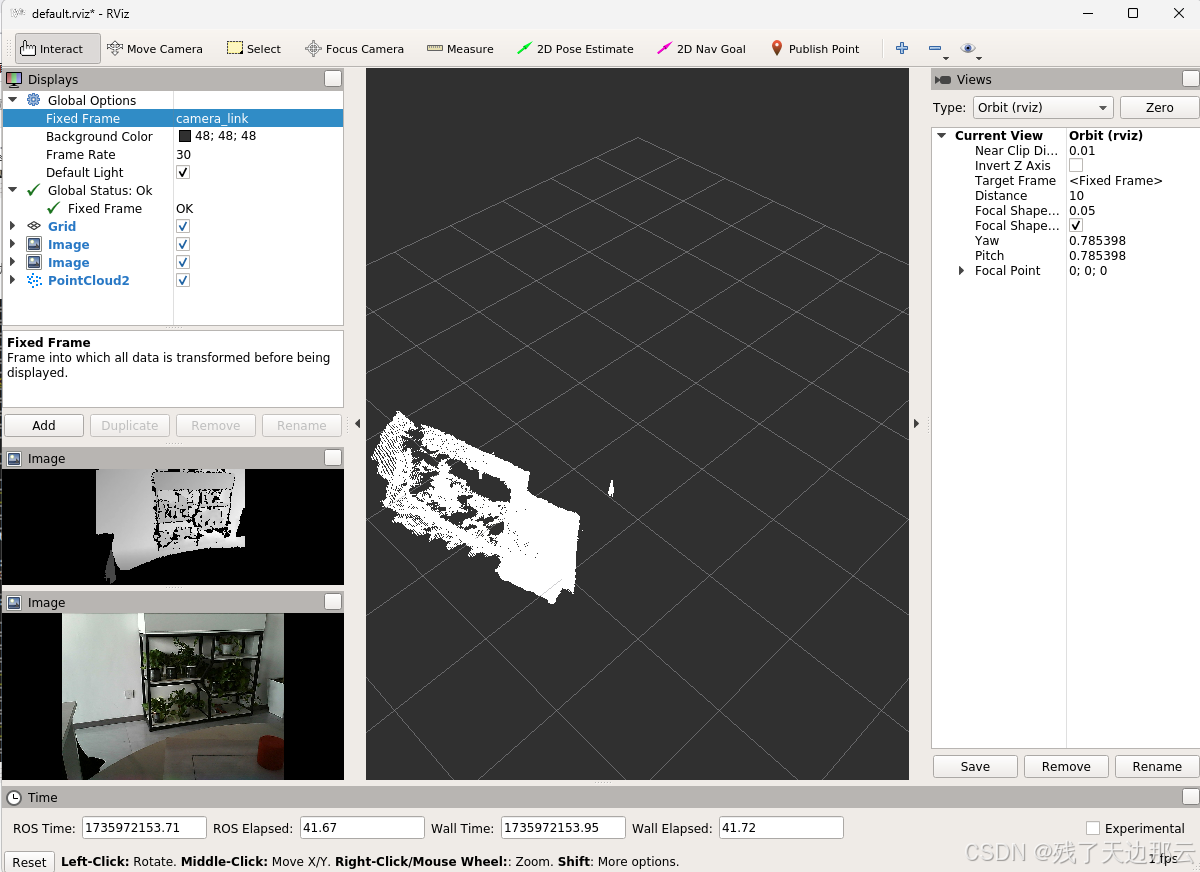
节点启动后可以自动连接,并且使用rviz正常读取深度图像、彩色图像和点云数据。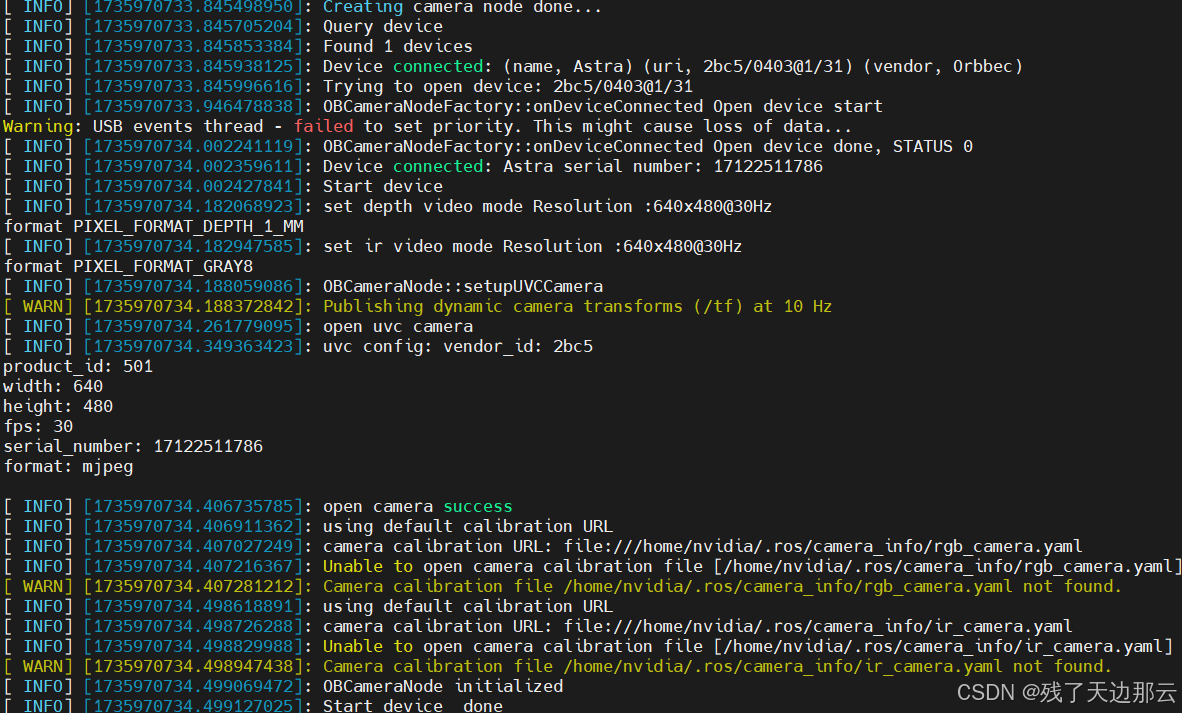
四.提供修改后的源码
通过网盘分享的文件:ros_astra_camera可以使用Astra pro版.zip
链接: https://pan.baidu.com/s/1G7sJOPdD8fKl1FtLwNtZCw?pwd=rsv8 提取码: rsv8

技术共进,成长同行——讯飞AI开发者社区
更多推荐
 18
18 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)