
sw模型生成urdf文件的详细流程
作为一个电控选手,本来觉着自己不会去碰solidworks,特别是从sw模型到urdf这个极度繁琐的过程。但是当我发现咸鱼上面一次转换需要50-70块,我就决定这活还是得自己做。期间遇到了很多bug,希望记录下来对需要做这个工作的人有一定的帮助。常用的快捷键按住鼠标中键——旋转模型Tab(Shift+Tab)——隐藏(显示)鼠标所在位置的零件。空格——选择视图显示所有隐藏1.第一步确定基准轴,坐标
- 说明:作为一个电控选手,本来觉着自己不会去碰solidworks,特别是从sw模型到urdf这个极度繁琐的过程。但是当我发现咸鱼上面一次转换需要50-70块,我就决定这活还是得自己做。
- 期间遇到了很多bug,希望记录下来对需要做这个工作的人有一定的帮助。有相关问题的选手欢迎与我联系交流:2250017028@qq.com
1.常用的快捷键
- 按住鼠标中键——旋转模型
- Tab(Shift+Tab)——隐藏(显示)鼠标所在位置的零件
- 空格——选择视图
- 右击右边工程头,选择带从属关系一起显示,可以显示所有零件,包括隐藏的零件
2. 操作流程
(1)确定基准轴,坐标系
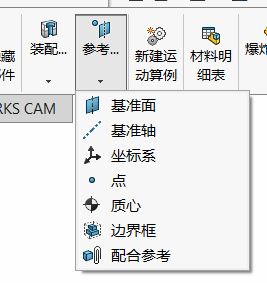
i. 首先选择基准轴,并选择一个对应的点(用于生成坐标系),基准轴就是各个关节的旋转/移动轴
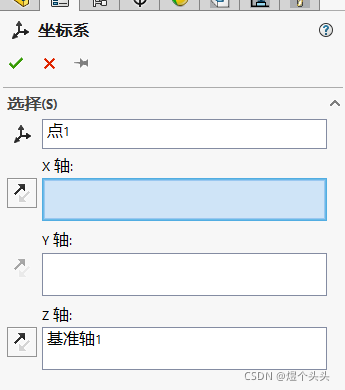
ii. 选择坐标系,一般只需确定原点和z轴方向即可,注意z轴方向的正负,这个在某些情况会影响到模型的显示。(比如base_link的z轴若取反了,整个模型在rviz中会变现为倒置)
注意!!
1.选择基准轴的时候要灵活使用零件隐藏,来找到最合适的位置的旋转轴,选择的时候只要选到以该轴为中心的面即可定位到该轴。
2.生成坐标系的时候,一定要确定坐标系成功生成了,因为有时候可能点和轴设置的不对,生成坐标系会失败,这会影响后面生成文件。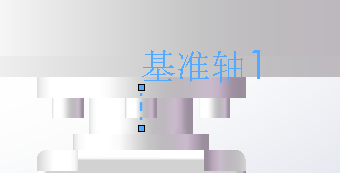
(2)生成joint和link
i. 工具 --> File --> Export as URDF,进入插件
ii. 从base_link到end_link,依次选择每个每个link对应的joint,模型以及参考坐标系。
注意:选择模型的时候一定要先确定好某轴旋转或移动的时候,哪些部分是与对应link固连的。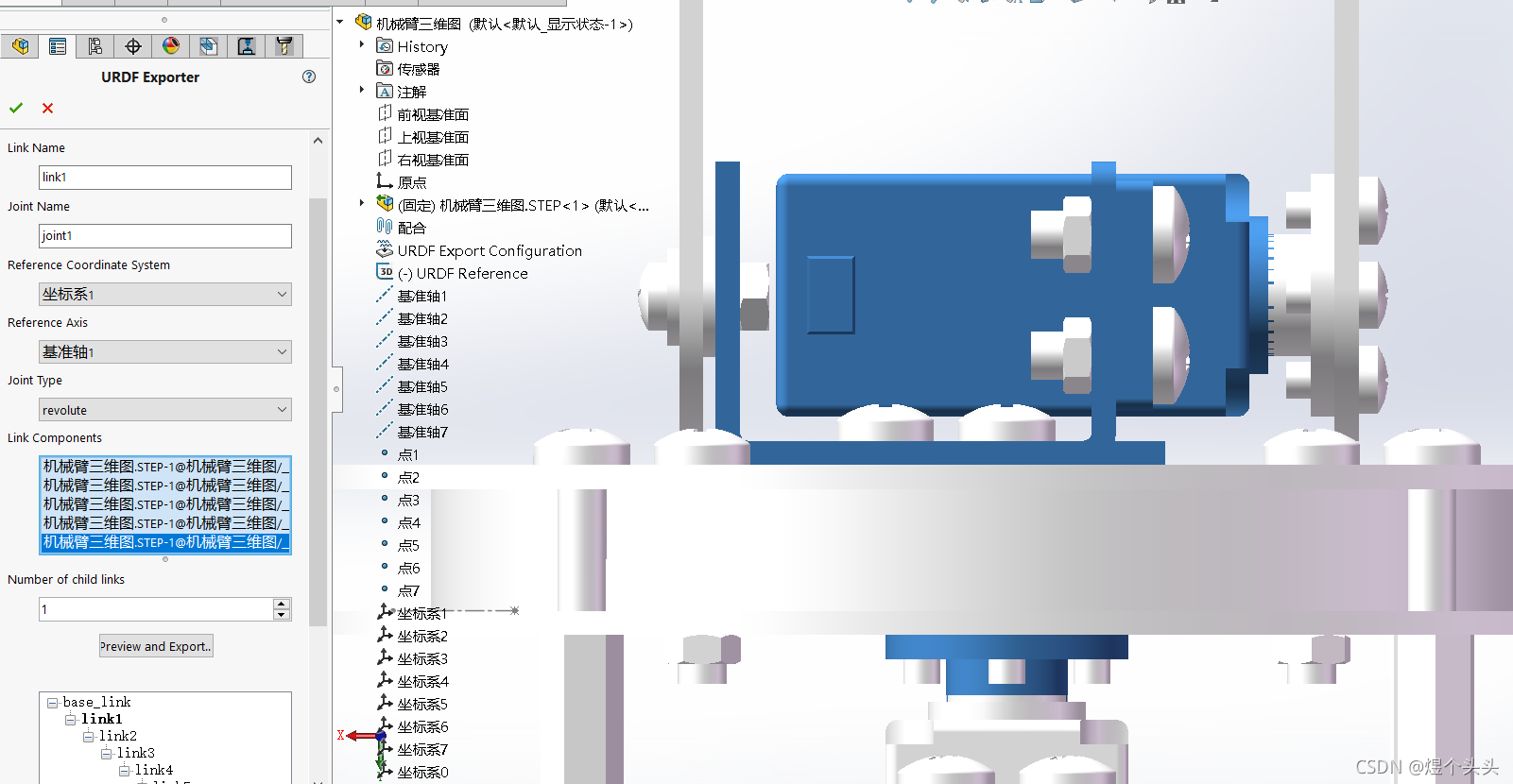
(3)选择配置参数
第二步完成后,按下Preview and Export,进入参数配置界面。只需按下面的参数输入到每个joint的配置中,link的参数不需要变动。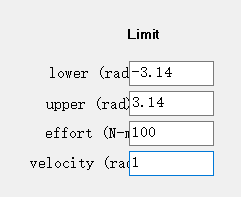
(4)生成文件
按下Finish,输入文件名,即可生成urdf文件包,里面还包含了例程。
注意!文件名推荐为机器人名字,因为这个会影响到生成文件中的相关参数名称。
3.总结
其实只要认真去分析每个link之间的关系,以及按照步骤一步步来,对于不太复杂的模型,20分钟左右即可完成整个操作。希望每个人都可以将sw模型成功转为urdf模型,然后在仿真环境里面快乐玩耍!!

技术共进,成长同行——讯飞AI开发者社区
更多推荐
 4
4 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)