
自动驾驶系列(二十)Autoware使用YoloV3识别(USB相机)
1,终端运行Autoware软件roslaunch runtime_manager runtime_manager.launch勾选USB Generic选项,同时插上一个标准USB接口的摄像头,点击RVIZ在RVZ中,Add->By Topic->imageRaw->image即可在左下窗口中查看到USB摄像头的原始图像。在Autoware界面,启动yolov3算法,注意wei
·
1,终端运行Autoware软件
roslaunch runtime_manager runtime_manager.launch
勾选USB Generic选项,同时插上一个标准USB接口的摄像头,点击RVIZ 
在RVZ中,Add->By Topic->imageRaw->image即可在左下窗口中查看到USB摄像头的原始图像。

在Autoware界面,启动yolov3算法,注意weights,cfg,names文件路径是否正确。

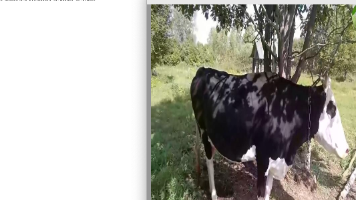
进入RVIZ界面,Add->By Topic->imageRects->image,即可看到YOLOV3的识别结果。



技术共进,成长同行——讯飞AI开发者社区
更多推荐
 0
0 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)