
深度学习与神经网络学习笔记(四)---线性回归
关于深度学习与神经网络的一些学习笔记
一.从零开始实现
1.构造线性数据集
import random
import torch
from d2l import torch as d2l
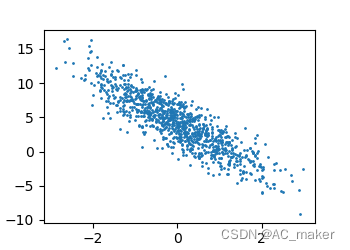
# 根据带有噪声的线性模型构造一个人造数据集。 我们使用线性模型参数w = [2,-3.4].T,b=4.2和噪声项e生成数据集及其标签
def synthetic_data(w, b, num_examples):
x = torch.normal(0, 1, (num_examples, len(w))) # 均值为0,方差为1的随机数,n个样本,列数是w的长度
y = torch.matmul(x, w) + b
y += torch.normal(0, 0.01, y.shape) # 均值为0,方差为0.01,形状和y长度一样的噪音
return x, y.reshape(-1, 1) # 列向量返回 -1表示行数由pytorch判断,1表示1列
true_w = torch.tensor([2, -3.4])
true_b = 4.2
features, labels = synthetic_data(true_w, true_b, 1000)
# features中的每一行都包含一个二维数据样本,labels中的每一行都包含一维标签值(一个标量)
print('features:', features[0], '\nlabel:', labels[0])
d2l.set_figsize()
d2l.plt.scatter(features[:, 1].detach().numpy(), labels.detach().numpy(), 1)
d2l.plt.show()
运行上述代码随机产生样本和对应图像,如下
对应输出
features: tensor([0.0057, 0.1321])
label: tensor([3.7614])
2.生成小批量
def data_iter(batch_size, feature, label):
num_examples = len(feature)
indices = list(range(num_examples))
# 这些样本是随机读取的,没有特定的顺序
random.shuffle(indices) # 打乱下标
for i in range(0, num_examples, batch_size):
batch_indices = torch.tensor(indices[i:min(i + batch_size, num_examples)])
# 返回形式features[torch.tensor([371, 275, 458, 585, 506, 961, 96, 606, 790, 468])]
yield feature[batch_indices], label[batch_indices]
batch_size = 10
for x, y in data_iter(batch_size, features, labels):
print(x, '\n', y)
break
输出
tensor([[-1.0282, 0.2672],
[-1.7735, -1.1364],
[ 0.0604, 0.0238],
[-0.5580, 0.8345],
[-2.7177, -1.1851],
[-3.1734, -0.8336],
[-0.4015, -1.6372],
[-0.4167, -0.7885],
[-0.1123, -0.3314],
[ 1.2128, -0.2061]])
tensor([[1.2239],
[4.5136],
[4.2542],
[0.2611],
[2.7865],
[0.6933],
[8.9344],
[6.0326],
[5.0944],
[7.3270]])
3.定义初始化模型参数
# 定义初始化模型参数
w = torch.normal(0, 0.01, size=(2, 1), requires_grad=True) # 均值为0,方差为0.01,2*1矩阵
b = torch.zeros(1, requires_grad=True)
print(b)输出
tensor([0.], requires_grad=True)
4.定义模型
def linreg(x, w, b):
return torch.matmul(x, w) + b5.定义损失函数-均方损失
def squared_loss(y_hat, y):
return (y_hat - y.reshape(y_hat.shape))**2 / 2 # 统一格式6.定义优化算法
def sgd(params, lr, batch_size):
with torch.no_grad():
for param in params:
param -= lr * param.grad / batch_size
param.grad.zero_()7.训练过程
lr = 0.03
num_epochs = 3
net = linreg
loss = squared_loss
for epoch in range(num_epochs):
for x, y in data_iter(batch_size, features, labels):
l = loss(net(x, w, b), y) # x 和 y 的小批量损失
l.sum().backward()
sgd([w, b], lr, batch_size) # 使用参数的梯度更新
with torch.no_grad():
train_l = loss(net(features, w, b), labels)
print(f'epoch {epoch + 1}, loss {float(train_l.mean())}')8.比较真实参数和通过训练学到的参数评估训练成功程度
# 比较真实参数和通过训练学到的参数来评估训练的成功程度
print(f'w的估计误差: {true_w-w.reshape(true_w.shape)}')
print(f'b的估计误差:{true_b-b}')整体代码浏览
import random
import torch
from d2l import torch as d2l
# 根据带有噪声的线性模型构造一个人造数据集。 我们使用线性模型参数w = [2,-3.4].T,b=4.2和噪声项e生成数据集及其标签
def synthetic_data(w, b, num_examples):
x = torch.normal(0, 1, (num_examples, len(w))) # 均值为0,方差为1的随机数,n个样本,列数是w的长度
y = torch.matmul(x, w) + b
y += torch.normal(0, 0.01, y.shape) # 均值为0,方差为0.01,形状和y长度一样的噪音
return x, y.reshape(-1, 1) # 列向量返回 -1表示行数由pytorch判断,1表示1列
true_w = torch.tensor([2, -3.4])
true_b = 4.2
features, labels = synthetic_data(true_w, true_b, 1000)
# features中的每一行都包含一个二维数据样本,labels中的每一行都包含一维标签值(一个标量)
print('features:', features[0], '\nlabel:', labels[0])
d2l.set_figsize()
d2l.plt.scatter(features[:, 1].detach().numpy(), labels.detach().numpy(), 1)
d2l.plt.show()
# 定义一个data_iter函数, 该函数接收批量大小,特征矩阵和标签向量作为输入,生成大小为batch_size的小批量
def data_iter(batch_size, feature, label):
num_examples = len(feature)
indices = list(range(num_examples))
# 这些样本是随机读取的,没有特定的顺序
random.shuffle(indices) # 打乱下标
for i in range(0, num_examples, batch_size):
batch_indices = torch.tensor(indices[i:min(i + batch_size, num_examples)])
# 返回形式features[torch.tensor([371, 275, 458, 585, 506, 961, 96, 606, 790, 468])]
yield feature[batch_indices], label[batch_indices]
batch_size = 10
for x, y in data_iter(batch_size, features, labels):
print(x, '\n', y)
break
# 定义初始化模型参数
w = torch.normal(0, 0.01, size=(2, 1), requires_grad=True) # 均值为0,方差为0.01,2*1矩阵
b = torch.zeros(1, requires_grad=True)
print(b)
# 定义模型
def linreg(x, w, b):
return torch.matmul(x, w) + b
# 定义损失函数
# 均方损失
def squared_loss(y_hat, y):
return (y_hat - y.reshape(y_hat.shape))**2 / 2 # 统一格式
# 定义优化算法
def sgd(params, lr, batch_size):
with torch.no_grad():
for param in params:
param -= lr * param.grad / batch_size
param.grad.zero_()
# 训练过程
lr = 0.03
num_epochs = 3
net = linreg
loss = squared_loss
for epoch in range(num_epochs):
for x, y in data_iter(batch_size, features, labels):
l = loss(net(x, w, b), y) # x 和 y 的小批量损失
l.sum().backward()
sgd([w, b], lr, batch_size) # 使用参数的梯度更新
with torch.no_grad():
train_l = loss(net(features, w, b), labels)
print(f'epoch {epoch + 1}, loss {float(train_l.mean())}')
# 比较真实参数和通过训练学到的参数来评估训练的成功程度
print(f'w的估计误差: {true_w-w.reshape(true_w.shape)}')
print(f'b的估计误差:{true_b-b}')
二.简单实现
1.所使用的包
# 通过使用深度学习框架来简洁地实现线性回归模型生成数据集
import numpy as np
import torch
from torch.utils import data
from d2l import torch as d2l
from torch import nn2.生成数据集
true_w = torch.tensor([2, -3.4])
true_b = 4.2
features, labels = d2l.synthetic_data(true_w, true_b, 1000)3.构造Pytorch数据迭代器
# 构造一个Pytorch数据迭代器
def load_array(data_arrays, batch_size, is_train=True):
dataset = data.TensorDataset(*data_arrays)
return data.DataLoader(dataset, batch_size, shuffle=is_train)
batch_size = 10
data_iter = load_array((features, labels), batch_size)
print(next(iter(data_iter)))
输出
[tensor([[ 0.1219, 1.5637],
[-0.1459, 0.0461],
[ 0.3757, 1.1786],
[ 0.7091, -1.2830],
[-0.1761, 0.4595],
[-0.6001, 0.3908],
[ 0.0719, 0.1164],
[-1.2292, 0.1371],
[ 0.4230, -1.6871],
[-2.2008, 0.8052]]), tensor([[-0.8791],
[ 3.7520],
[ 0.9499],
[ 9.9885],
[ 2.2831],
[ 1.6512],
[ 3.9626],
[ 1.2727],
[10.7992],
[-2.9386]])]
4.使用框架的预定义好的层
# 使用框架的预定义好的层
net = nn.Sequential(nn.Linear(2, 1)) # 输入的维度2,输出的维度是15.初始化参数模型
# 初始化模型参数
net[0].weight.data.normal_(0, 0.01)
net[0].bias.data.fill_(0)6.均方误差
# 计算均方误差使用的是MSELoss类,也称为平方L2范数
loss = nn.MSELoss()7.实例化sgd实例
# 实例化SGD实例
trainer = torch.optim.SGD(net.parameters(), lr=0.03)8.训练过程
num_epochs = 3
for epoch in range(num_epochs):
for x, y in data_iter:
l = loss(net(x), y)
trainer.zero_grad()
l.backward()
trainer.step()
l = loss(net(features), labels)
print(f'epoch:{epoch + 1}, loss:{l:f}')输出
epoch:1, loss:0.000281
epoch:2, loss:0.000095
epoch:3, loss:0.000094
整体代码浏览
# 通过使用深度学习框架来简洁地实现线性回归模型生成数据集
import numpy as np
import torch
from torch.utils import data
from d2l import torch as d2l
from torch import nn
true_w = torch.tensor([2, -3.4])
true_b = 4.2
features, labels = d2l.synthetic_data(true_w, true_b, 1000)
# 调用框架中现有的API来读取数据
# 构造一个Pytorch数据迭代器
def load_array(data_arrays, batch_size, is_train=True):
dataset = data.TensorDataset(*data_arrays)
return data.DataLoader(dataset, batch_size, shuffle=is_train)
batch_size = 10
data_iter = load_array((features, labels), batch_size)
print(next(iter(data_iter)))
# 使用框架的预定义好的层
net = nn.Sequential(nn.Linear(2, 1)) # 输入的维度2,输出的维度是1
# 初始化模型参数
net[0].weight.data.normal_(0, 0.01)
net[0].bias.data.fill_(0)
# 计算均方误差使用的是MSELoss类,也称为平方L2范数
loss = nn.MSELoss()
# 实例化SGD实例
trainer = torch.optim.SGD(net.parameters(), lr=0.03)
num_epochs = 3
for epoch in range(num_epochs):
for x, y in data_iter:
l = loss(net(x), y)
trainer.zero_grad()
l.backward()
trainer.step()
l = loss(net(features), labels)
print(f'epoch:{epoch + 1}, loss:{l:f}')
技术共进,成长同行——讯飞AI开发者社区
更多推荐


 1
1 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)