
BMP280气压温度传感器_esp32读取
【代码】BMP280气压温度传感器_esp32读取。
·
1.Adafruit_BMP280.c
/***************************************************************************
This is a library for the BMP280 pressure sensor
Designed specifically to work with the Adafruit BMP280 Breakout
----> http://www.adafruit.com/products/2651
These sensors use I2C to communicate, 2 pins are required to interface.
Adafruit invests time and resources providing this open source code,
please support Adafruit andopen-source hardware by purchasing products
from Adafruit!
Written by Kevin Townsend for Adafruit Industries.
BSD license, all text above must be included in any redistribution
***************************************************************************/
#include "Arduino.h"
#include <Wire.h>
#include <SPI.h>
#include "Adafruit_BMP280.h"
static bmp280_calib_data bmp280_calib;
/***************************************************************************
PRIVATE FUNCTIONS
***************************************************************************/
Adafruit_BMP280::Adafruit_BMP280()
: _cs(-1), _mosi(-1), _miso(-1), _sck(-1)
{ }
Adafruit_BMP280::Adafruit_BMP280(int8_t cspin)
: _cs(cspin), _mosi(-1), _miso(-1), _sck(-1)
{ }
Adafruit_BMP280::Adafruit_BMP280(int8_t cspin, int8_t mosipin, int8_t misopin, int8_t sckpin)
: _cs(cspin), _mosi(mosipin), _miso(misopin), _sck(sckpin)
{ }
bool Adafruit_BMP280::begin(uint8_t a) {
_i2caddr = a;
if (_cs == -1) {
// i2c
Wire.begin(23,5,1000000);
} else {
digitalWrite(_cs, HIGH);
pinMode(_cs, OUTPUT);
if (_sck == -1) {
// hardware SPI
SPI.begin();
} else {
// software SPI
pinMode(_sck, OUTPUT);
pinMode(_mosi, OUTPUT);
pinMode(_miso, INPUT);
}
}
if (read8(BMP280_REGISTER_CHIPID) != 0x58)
return false;
readCoefficients();
write8(BMP280_REGISTER_CONTROL, 0x3F);
return true;
}
uint8_t Adafruit_BMP280::spixfer(uint8_t x) {
if (_sck == -1)
return SPI.transfer(x);
// software spi
//Serial.println("Software SPI");
uint8_t reply = 0;
for (int i=7; i>=0; i--) {
reply <<= 1;
digitalWrite(_sck, LOW);
digitalWrite(_mosi, x & (1<<i));
digitalWrite(_sck, HIGH);
if (digitalRead(_miso))
reply |= 1;
}
return reply;
}
/**************************************************************************/
/*!
@brief Writes an 8 bit value over I2C/SPI
*/
/**************************************************************************/
void Adafruit_BMP280::write8(byte reg, byte value)
{
if (_cs == -1) {
Wire.beginTransmission((uint8_t)_i2caddr);
Wire.write((uint8_t)reg);
Wire.write((uint8_t)value);
Wire.endTransmission();
} else {
if (_sck == -1)
SPI.beginTransaction(SPISettings(500000, MSBFIRST, SPI_MODE0));
digitalWrite(_cs, LOW);
spixfer(reg & ~0x80); // write, bit 7 low
spixfer(value);
digitalWrite(_cs, HIGH);
if (_sck == -1)
SPI.endTransaction(); // release the SPI bus
}
}
/**************************************************************************/
/*!
@brief Reads an 8 bit value over I2C
*/
/**************************************************************************/
uint8_t Adafruit_BMP280::read8(byte reg)
{
uint8_t value;
if (_cs == -1) {
Wire.beginTransmission((uint8_t)_i2caddr);
Wire.write((uint8_t)reg);
Wire.endTransmission();
Wire.requestFrom((uint8_t)_i2caddr, (byte)1);
value = Wire.read();
Wire.endTransmission();
} else {
if (_sck == -1)
SPI.beginTransaction(SPISettings(500000, MSBFIRST, SPI_MODE0));
digitalWrite(_cs, LOW);
spixfer(reg | 0x80); // read, bit 7 high
value = spixfer(0);
digitalWrite(_cs, HIGH);
if (_sck == -1)
SPI.endTransaction(); // release the SPI bus
}
return value;
}
/**************************************************************************/
/*!
@brief Reads a 16 bit value over I2C
*/
/**************************************************************************/
uint16_t Adafruit_BMP280::read16(byte reg)
{
uint16_t value;
if (_cs == -1) {
Wire.beginTransmission((uint8_t)_i2caddr);
Wire.write((uint8_t)reg);
Wire.endTransmission();
Wire.requestFrom((uint8_t)_i2caddr, (byte)2);
value = (Wire.read() << 8) | Wire.read();
Wire.endTransmission();
} else {
if (_sck == -1)
SPI.beginTransaction(SPISettings(500000, MSBFIRST, SPI_MODE0));
digitalWrite(_cs, LOW);
spixfer(reg | 0x80); // read, bit 7 high
value = (spixfer(0) << 8) | spixfer(0);
digitalWrite(_cs, HIGH);
if (_sck == -1)
SPI.endTransaction(); // release the SPI bus
}
return value;
}
uint16_t Adafruit_BMP280::read16_LE(byte reg) {
uint16_t temp = read16(reg);
return (temp >> 8) | (temp << 8);
}
/**************************************************************************/
/*!
@brief Reads a signed 16 bit value over I2C
*/
/**************************************************************************/
int16_t Adafruit_BMP280::readS16(byte reg)
{
return (int16_t)read16(reg);
}
int16_t Adafruit_BMP280::readS16_LE(byte reg)
{
return (int16_t)read16_LE(reg);
}
/**************************************************************************/
/*!
@brief Reads the factory-set coefficients
*/
/**************************************************************************/
void Adafruit_BMP280::readCoefficients(void)
{
bmp280_calib.dig_T1 = read16_LE(BMP280_REGISTER_DIG_T1);
bmp280_calib.dig_T2 = readS16_LE(BMP280_REGISTER_DIG_T2);
bmp280_calib.dig_T3 = readS16_LE(BMP280_REGISTER_DIG_T3);
bmp280_calib.dig_P1 = read16_LE(BMP280_REGISTER_DIG_P1);
bmp280_calib.dig_P2 = readS16_LE(BMP280_REGISTER_DIG_P2);
bmp280_calib.dig_P3 = readS16_LE(BMP280_REGISTER_DIG_P3);
bmp280_calib.dig_P4 = readS16_LE(BMP280_REGISTER_DIG_P4);
bmp280_calib.dig_P5 = readS16_LE(BMP280_REGISTER_DIG_P5);
bmp280_calib.dig_P6 = readS16_LE(BMP280_REGISTER_DIG_P6);
bmp280_calib.dig_P7 = readS16_LE(BMP280_REGISTER_DIG_P7);
bmp280_calib.dig_P8 = readS16_LE(BMP280_REGISTER_DIG_P8);
bmp280_calib.dig_P9 = readS16_LE(BMP280_REGISTER_DIG_P9);
}
/**************************************************************************/
/*!
*/
/**************************************************************************/
float Adafruit_BMP280::readTemperature(void)
{
int32_t var1, var2;
int32_t adc_T = read16(BMP280_REGISTER_TEMPDATA);
adc_T <<= 8;
adc_T |= read8(BMP280_REGISTER_TEMPDATA+2);
adc_T >>= 4;
var1 = ((((adc_T>>3) - ((int32_t)bmp280_calib.dig_T1 <<1))) *
((int32_t)bmp280_calib.dig_T2)) >> 11;
var2 = (((((adc_T>>4) - ((int32_t)bmp280_calib.dig_T1)) *
((adc_T>>4) - ((int32_t)bmp280_calib.dig_T1))) >> 12) *
((int32_t)bmp280_calib.dig_T3)) >> 14;
t_fine = var1 + var2;
float T = (t_fine * 5 + 128) >> 8;
return T/100;
}
/**************************************************************************/
/*!
*/
/**************************************************************************/
float Adafruit_BMP280::readPressure(void) {
int64_t var1, var2, p;
int32_t adc_P = read16(BMP280_REGISTER_PRESSUREDATA);
adc_P <<= 8;
adc_P |= read8(BMP280_REGISTER_PRESSUREDATA+2);
adc_P >>= 4;
var1 = ((int64_t)t_fine) - 128000;
var2 = var1 * var1 * (int64_t)bmp280_calib.dig_P6;
var2 = var2 + ((var1*(int64_t)bmp280_calib.dig_P5)<<17);
var2 = var2 + (((int64_t)bmp280_calib.dig_P4)<<35);
var1 = ((var1 * var1 * (int64_t)bmp280_calib.dig_P3)>>8) +
((var1 * (int64_t)bmp280_calib.dig_P2)<<12);
var1 = (((((int64_t)1)<<47)+var1))*((int64_t)bmp280_calib.dig_P1)>>33;
if (var1 == 0) {
return 0; // avoid exception caused by division by zero
}
p = 1048576 - adc_P;
p = (((p<<31) - var2)*3125) / var1;
var1 = (((int64_t)bmp280_calib.dig_P9) * (p>>13) * (p>>13)) >> 25;
var2 = (((int64_t)bmp280_calib.dig_P8) * p) >> 19;
p = ((p + var1 + var2) >> 8) + (((int64_t)bmp280_calib.dig_P7)<<4);
return (float)p/256;
}
// 需包含Adafruit_BMP280.h头文件
float Adafruit_BMP280::readAltitude(float seaLevelhPa) {
// 获取当前气压(单位Pa,需转换为hPa)
float pressure = readPressure() / 100.0F;
// 国际民航组织(ICAO)标准公式
return 44330.0 * (1.0 - pow(pressure / seaLevelhPa, 0.1903));
}2.Adafruit_BMP280.h
/***************************************************************************
This is a library for the BMP280 pressure sensor
Designed specifically to work with the Adafruit BMP280 Breakout
----> http://www.adafruit.com/products/2651
These sensors use I2C to communicate, 2 pins are required to interface.
Adafruit invests time and resources providing this open source code,
please support Adafruit andopen-source hardware by purchasing products
from Adafruit!
Written by Kevin Townsend for Adafruit Industries.
BSD license, all text above must be included in any redistribution
***************************************************************************/
#ifndef __BMP280_H__
#define __BMP280_H__
#if (ARDUINO >= 100)
#include "Arduino.h"
#else
#include "WProgram.h"
#endif
#include <Adafruit_Sensor.h>
#ifdef __AVR_ATtiny85__
#include "TinyWireM.h"
#define Wire TinyWireM
#else
#include <Wire.h>
#endif
/*=========================================================================
I2C ADDRESS/BITS
-----------------------------------------------------------------------*/
// #define BMP280_ADDRESS (0x77)
#define BMP280_ADDRESS (0x76)
/*=========================================================================*/
/*=========================================================================
REGISTERS
-----------------------------------------------------------------------*/
enum
{
BMP280_REGISTER_DIG_T1 = 0x88,
BMP280_REGISTER_DIG_T2 = 0x8A,
BMP280_REGISTER_DIG_T3 = 0x8C,
BMP280_REGISTER_DIG_P1 = 0x8E,
BMP280_REGISTER_DIG_P2 = 0x90,
BMP280_REGISTER_DIG_P3 = 0x92,
BMP280_REGISTER_DIG_P4 = 0x94,
BMP280_REGISTER_DIG_P5 = 0x96,
BMP280_REGISTER_DIG_P6 = 0x98,
BMP280_REGISTER_DIG_P7 = 0x9A,
BMP280_REGISTER_DIG_P8 = 0x9C,
BMP280_REGISTER_DIG_P9 = 0x9E,
BMP280_REGISTER_CHIPID = 0xD0,
BMP280_REGISTER_VERSION = 0xD1,
BMP280_REGISTER_SOFTRESET = 0xE0,
BMP280_REGISTER_CAL26 = 0xE1, // R calibration stored in 0xE1-0xF0
BMP280_REGISTER_CONTROL = 0xF4,
BMP280_REGISTER_CONFIG = 0xF5,
BMP280_REGISTER_PRESSUREDATA = 0xF7,
BMP280_REGISTER_TEMPDATA = 0xFA,
};
/*=========================================================================*/
/*=========================================================================
CALIBRATION DATA
-----------------------------------------------------------------------*/
typedef struct
{
uint16_t dig_T1;
int16_t dig_T2;
int16_t dig_T3;
uint16_t dig_P1;
int16_t dig_P2;
int16_t dig_P3;
int16_t dig_P4;
int16_t dig_P5;
int16_t dig_P6;
int16_t dig_P7;
int16_t dig_P8;
int16_t dig_P9;
uint8_t dig_H1;
int16_t dig_H2;
uint8_t dig_H3;
int16_t dig_H4;
int16_t dig_H5;
int8_t dig_H6;
} bmp280_calib_data;
/*=========================================================================*/
/*
class Adafruit_BMP280_Unified : public Adafruit_Sensor
{
public:
Adafruit_BMP280_Unified(int32_t sensorID = -1);
bool begin(uint8_t addr = BMP280_ADDRESS);
void getTemperature(float *temp);
void getPressure(float *pressure);
float pressureToAltitude(float seaLevel, float atmospheric, float temp);
float seaLevelForAltitude(float altitude, float atmospheric, float temp);
void getEvent(sensors_event_t*);
void getSensor(sensor_t*);
private:
uint8_t _i2c_addr;
int32_t _sensorID;
};
*/
class Adafruit_BMP280
{
public:
Adafruit_BMP280(void);
Adafruit_BMP280(int8_t cspin);
Adafruit_BMP280(int8_t cspin, int8_t mosipin, int8_t misopin, int8_t sckpin);
bool begin(uint8_t addr = BMP280_ADDRESS);
float readTemperature(void);
float readPressure(void);
float readAltitude(float seaLevelhPa) ;
// float pressureToAltitude(float seaLevel, float atmospheric, float temp);
// float seaLevelForAltitude(float altitude, float atmospheric, float temp);
private:
void readCoefficients(void);
uint8_t spixfer(uint8_t x);
void write8(byte reg, byte value);
uint8_t read8(byte reg);
uint16_t read16(byte reg);
int16_t readS16(byte reg);
uint16_t read16_LE(byte reg); // little endian
int16_t readS16_LE(byte reg); // little endian
uint8_t _i2caddr;
int32_t _sensorID;
int32_t t_fine;
int8_t _cs, _mosi, _miso, _sck;
};
#endif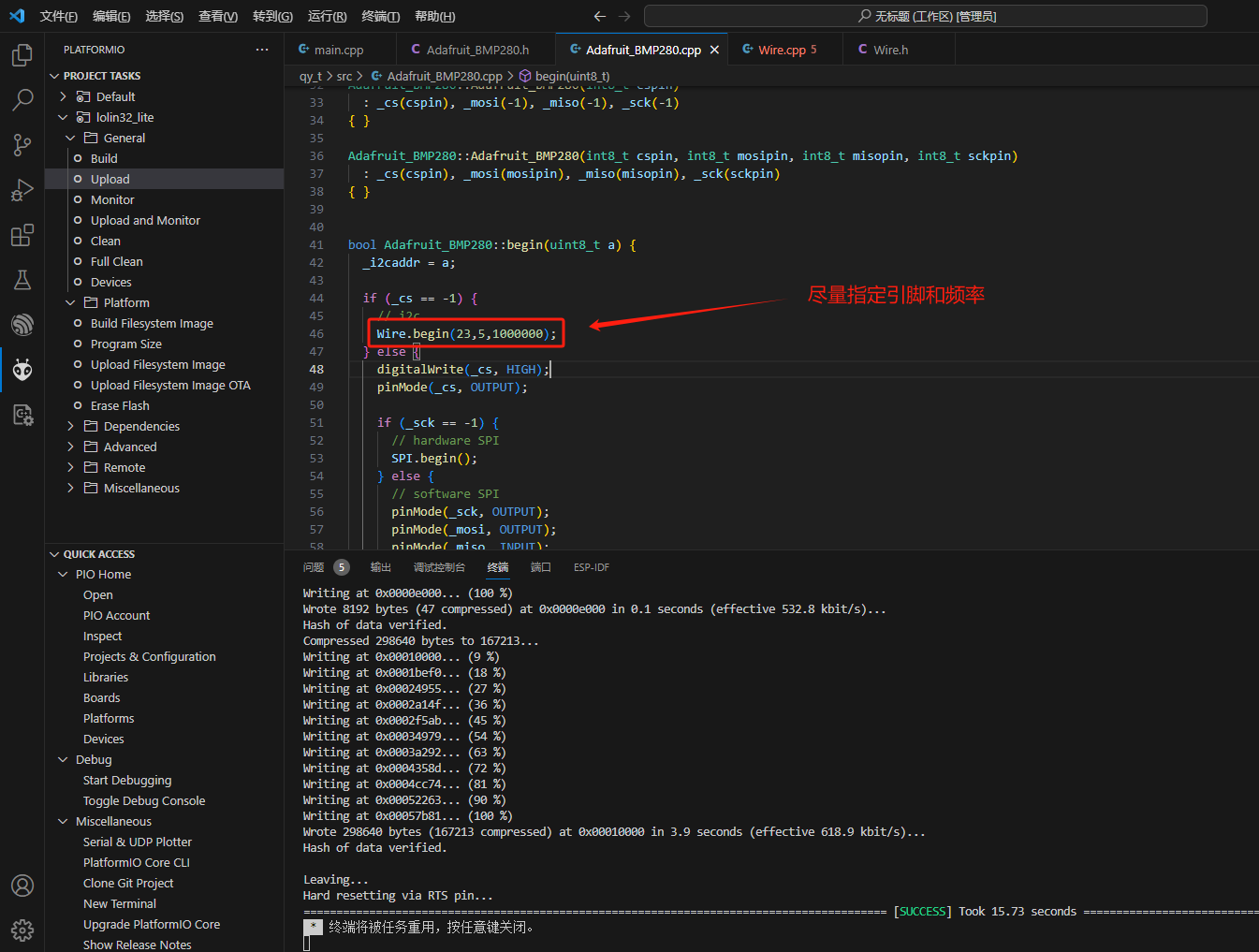
3.main.c
#include <Wire.h>
#include <SPI.h>
#include <Adafruit_Sensor.h>
#include <Adafruit_BMP280.h>
#define BMP_SCK 13
#define BMP_MISO 12
#define BMP_MOSI 11
#define BMP_CS 10
Adafruit_BMP280 bme; // I2C
//Adafruit_BMP280 bme(BMP_CS); // hardware SPI
//Adafruit_BMP280 bme(BMP_CS, BMP_MOSI, BMP_MISO, BMP_SCK);
void setup() {
Serial.begin(115200);
Serial.println(F("BMP280 test"));
if (!bme.begin()) {
Serial.println("Could not find a valid BMP280 sensor, check wiring!");
while (1);
}
}
void loop() {
// Serial.print("Temperature = ");
// Serial.print(bme.readTemperature());
// Serial.println(" *C");
// Serial.print("Pressure = ");
// Serial.print(bme.readPressure());
// Serial.println(" Pa");
Serial.print("Approx altitude = ");
Serial.print(bme.readAltitude(1013.25)); // this should be adjusted to your local forcase
Serial.println(" m");
Serial.println();
delay(200);
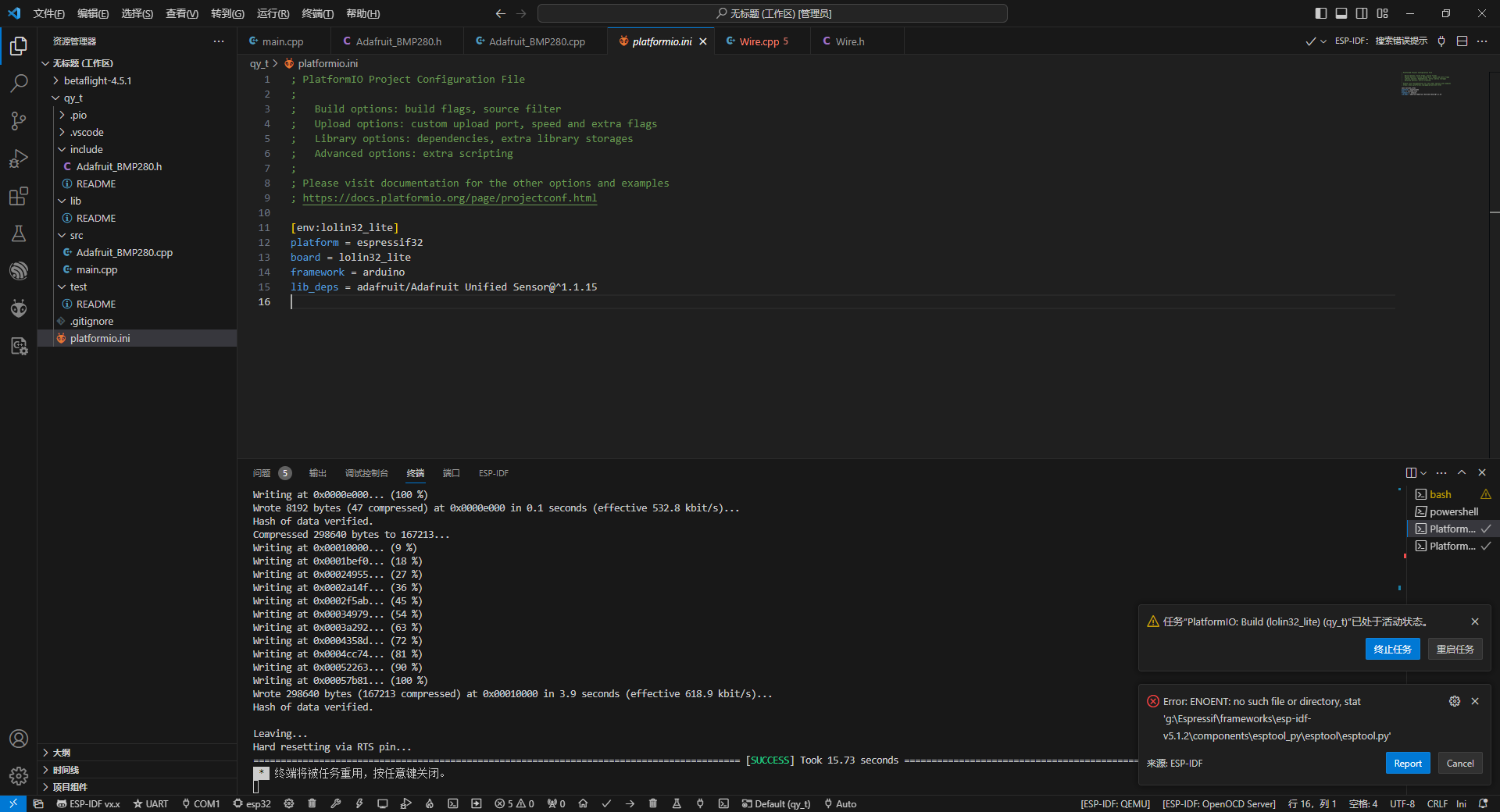
}项目例程:
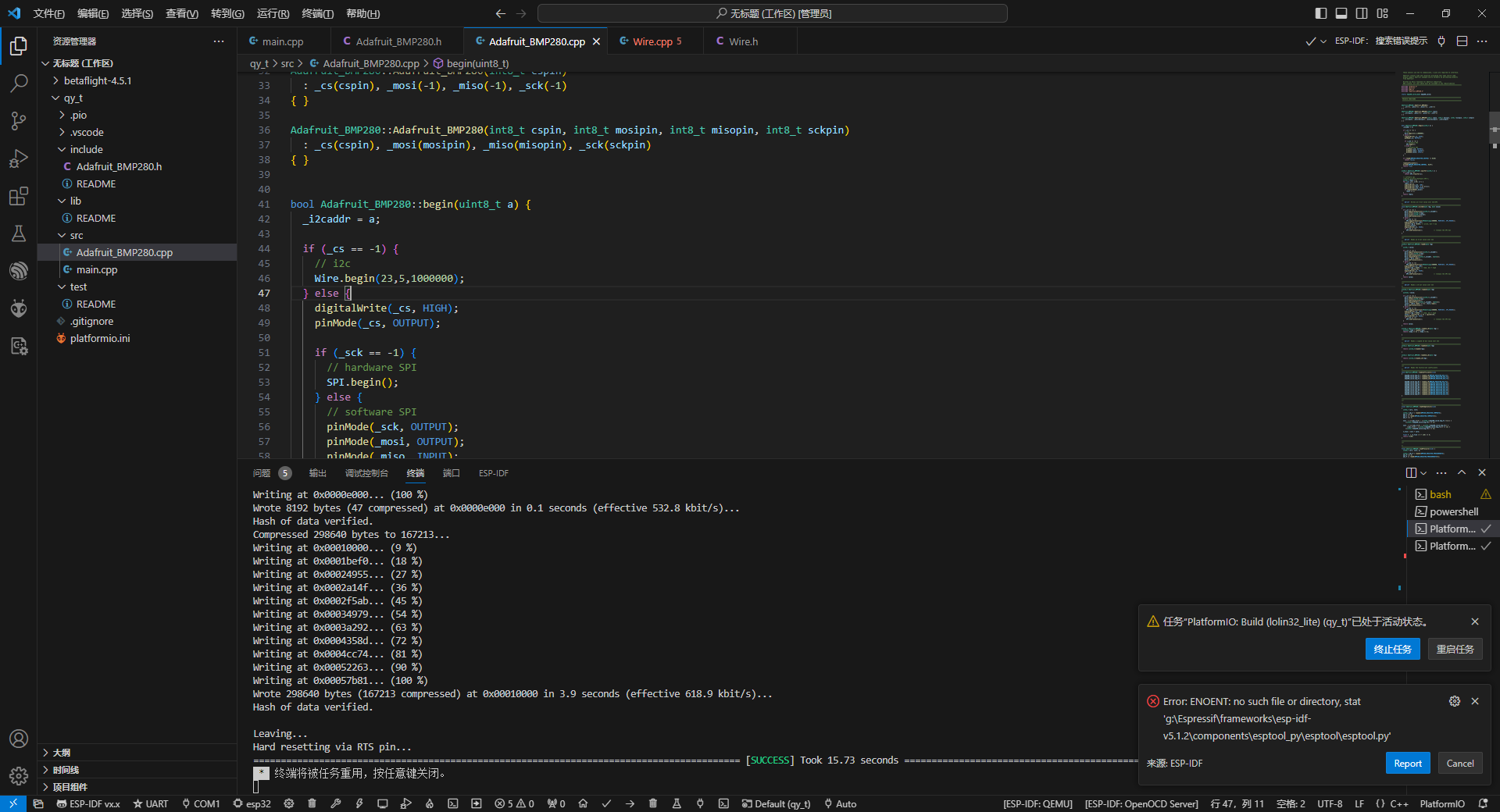
加载的库文件:
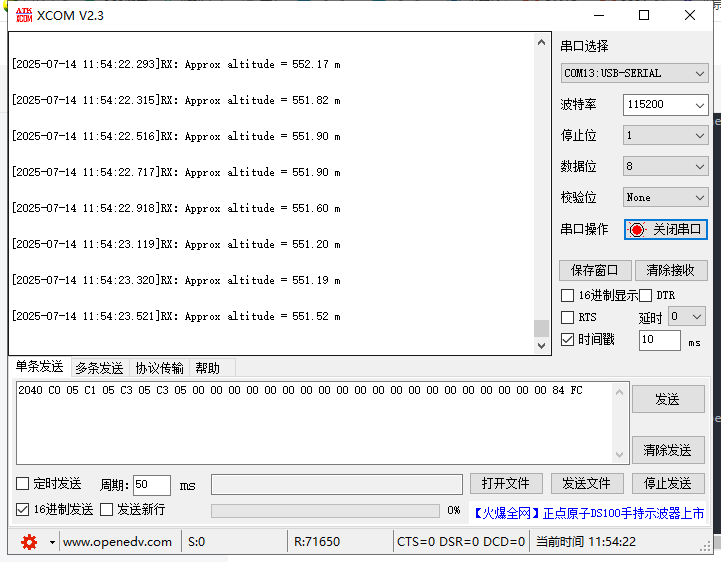
4.串口输出信息:

技术共进,成长同行——讯飞AI开发者社区
更多推荐
 3
3 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)