
博弈演化:基于python的三方演化博弈
基于python实现了三方演化博弈,定义replicator_dynamics函数生成动态方程,compute_jacobian计算雅可比矩阵,analyze_stability进行更全面的稳定性分析,支持符号和数值两种方式,dynamic_simulation处理数值仿真,以及可视化函数。
·
基于python实现了三方演化博弈,定义replicator_dynamics函数生成动态方程,compute_jacobian计算雅可比矩阵,analyze_stability进行更全面的稳定性分析,支持符号和数值两种方式,dynamic_simulation处理数值仿真,以及可视化函数。
# -*- coding: utf-8 -*-
"""
三方演化博弈完整实现 - 修复稳定性分析版本
包含:符号计算、动态仿真、稳定性分析、三维可视化
"""
import numpy as np
import sympy as sp
import matplotlib.pyplot as plt
# ================ 修复中文显示 ================
plt.rcParams['font.sans-serif'] = ['SimHei'] # 设置黑体
plt.rcParams['axes.unicode_minus'] = False # 修复负号显示
import matplotlib.pyplot as plt
from scipy.integrate import odeint
from mpl_toolkits.mplot3d import Axes3D
# ================== 符号定义 ==================
x, y, z = sp.symbols('x y z') # 决策变量
Rp, Cph, Cpl, Cp, Bt, Fp, Mp, Ct, Ft, Mt, Cg, Tg = sp.symbols(
'Rp Cph Cpl Cp Bt Fp Mp Ct Ft Mt Cg Tg'
)
# ================== 模型核心 ==================
def replicator_dynamics():
"""三方复制动态方程"""
dx = x * (1 - x) * (Cph - Cpl - Cp - Bt - y * (Rp - Bt) - z * (Fp + Mp))
dy = y * (1 - y) * ((1 - x) * (Bt - Mt) - (Ft + Mt) * z - Ct)
dz = z * (1 - z) * (Cg - Fp - Ft - Tg + (Mp + Fp + Tg) * x + (Mt + Ft + Tg) * y - Tg * x * y)
return [dx, dy, dz]
def compute_jacobian():
"""计算雅可比矩阵(带参数保留)"""
eqs = replicator_dynamics()
return sp.Matrix([[sp.simplify(sp.diff(eq, var)) for var in [x, y, z]] for eq in eqs])
def analyze_stability(jacobian, params=None):
"""
增强版稳定性分析
:param jacobian: 雅可比矩阵
:param params: 参数字典(可选,用于数值计算)
:return: 稳定性分析结果字典
"""
equilibrium_points = [
(0, 0, 0), (0, 0, 1), (0, 1, 0), (0, 1, 1),
(1, 0, 0), (1, 0, 1), (1, 1, 0), (1, 1, 1)
]
# 参数替换
subs_dict = {}
if params:
subs_dict = {
Rp: params['Rp'], Cph: params['Cph'], Cpl: params['Cpl'],
Cp: params['Cp'], Bt: params['Bt'], Fp: params['Fp'],
Mp: params['Mp'], Ct: params['Ct'], Ft: params['Ft'],
Mt: params['Mt'], Cg: params['Cg'], Tg: params['Tg']
}
results = {}
for point in equilibrium_points:
# 代入均衡点
J = jacobian.subs({x: point[0], y: point[1], z: point[2]})
# 参数替换
if subs_dict:
J = J.subs(subs_dict)
try:
# 尝试数值计算
J_np = np.array(J.tolist(), dtype=np.float64)
eigvals = np.linalg.eigvals(J_np)
stable = all(np.real(eigvals) < 0)
results[point] = {
'type': 'numerical',
'eigenvalues': eigvals,
'stable': stable
}
except TypeError:
# 符号分析处理
eig_dict = J.eigenvals()
eig_list = []
for val, count in eig_dict.items():
eig_list.extend([val] * count)
conditions = [sp.re(val) < 0 for val in eig_list]
results[point] = {
'type': 'symbolic',
'eigenvalues': eig_list,
'conditions': conditions
}
return results
# ================== 数值仿真 ==================
def dynamic_simulation(ic, t, params):
"""动态仿真函数"""
# 参数替换字典
subs_dict = {
Rp: params['Rp'], Cph: params['Cph'], Cpl: params['Cpl'],
Cp: params['Cp'], Bt: params['Bt'], Fp: params['Fp'],
Mp: params['Mp'], Ct: params['Ct'], Ft: params['Ft'],
Mt: params['Mt'], Cg: params['Cg'], Tg: params['Tg']
}
# 转换为数值函数
dx, dy, dz = replicator_dynamics()
dx_num = sp.lambdify((x, y, z), dx.subs(subs_dict), 'numpy')
dy_num = sp.lambdify((x, y, z), dy.subs(subs_dict), 'numpy')
dz_num = sp.lambdify((x, y, z), dz.subs(subs_dict), 'numpy')
def system(state, t):
return [
dx_num(*state),
dy_num(*state),
dz_num(*state)
]
return odeint(system, ic, t)
# ================== 可视化 ==================
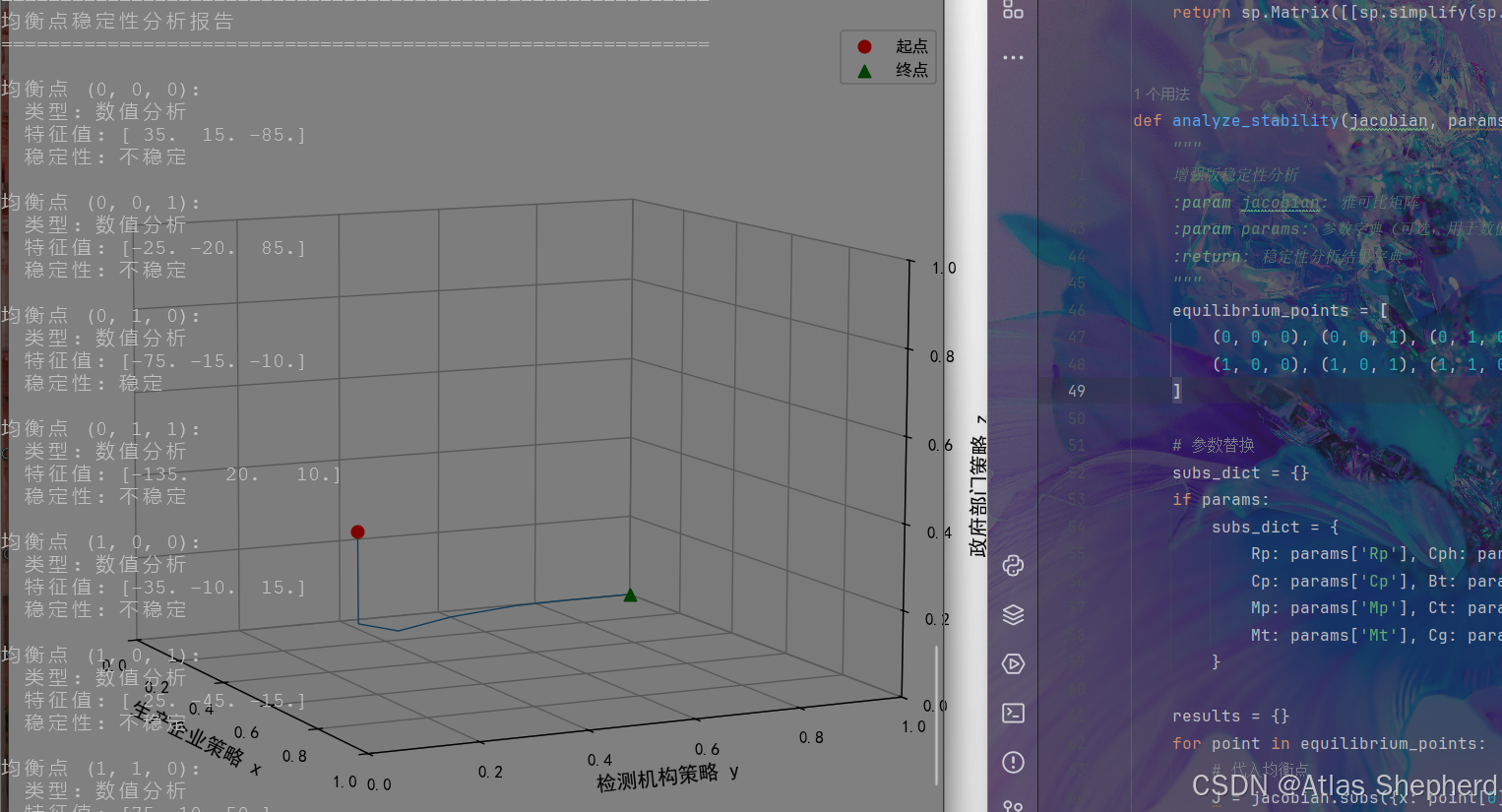
def plot_3d_trajectory(data, title="三方博弈演化轨迹"):
"""三维演化轨迹可视化"""
fig = plt.figure(figsize=(12, 8))
ax = fig.add_subplot(111, projection='3d')
ax.plot(data[:, 0], data[:, 1], data[:, 2], lw=0.8)
ax.scatter(data[0, 0], data[0, 1], data[0, 2], c='r', marker='o', s=50, label='起点')
ax.scatter(data[-1, 0], data[-1, 1], data[-1, 2], c='g', marker='^', s=50, label='终点')
ax.set_xlim(0, 1)
ax.set_ylim(0, 1)
ax.set_zlim(0, 1)
ax.set_xlabel('生产企业策略 x', fontsize=12)
ax.set_ylabel('检测机构策略 y', fontsize=12)
ax.set_zlabel('政府部门策略 z', fontsize=12)
ax.view_init(elev=25, azim=-45)
plt.title(title, fontsize=14, pad=20)
plt.legend()
plt.tight_layout()
plt.show()
def print_stability(results):
"""格式化输出稳定性分析结果"""
print("\n" + "=" * 60)
print("均衡点稳定性分析报告")
print("=" * 60)
for point, info in results.items():
print(f"\n均衡点 {point}:")
if info['type'] == 'numerical':
print(f" 类型: 数值分析")
print(f" 特征值: {info['eigenvalues'].round(4)}")
print(f" 稳定性: {'稳定' if info['stable'] else '不稳定'}")
else:
print(f" 类型: 符号分析")
print(" 特征值条件:")
for cond in info['conditions']:
print(f" → {sp.pretty(cond, use_unicode=True)}")
# ================== 示例执行 ==================
if __name__ == "__main__":
# 参数设置
params = {
'Rp': 150, 'Cph': 85, 'Cpl': 0, 'Cp': 10,
'Bt': 40, 'Fp': 40, 'Mp': 20, 'Ct': 10,
'Ft': 20, 'Mt': 15, 'Cg': 15, 'Tg': 40
}
# 计算雅可比矩阵
jac = compute_jacobian()
# 带参数的稳定性分析
stability_results = analyze_stability(jac, params=params)
print_stability(stability_results)
# 动态仿真
t = np.linspace(0, 50, 1000)
trajectory = dynamic_simulation(
ic=(0.3, 0.3, 0.3),
t=t,
params=params
)
# 可视化
plot_3d_trajectory(trajectory, "基准参数下的演化轨迹")
技术共进,成长同行——讯飞AI开发者社区
更多推荐
 4
4 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)