
【搜索算法——爬山算法】
爬山算法——通俗易懂,从小白到入门
提示:暂无提示
搜索算法——爬山算法
前言
当问题不能被拆分求解的时候,可以使用搜索技术。与分治算法、动态规划算法、贪心算法不同,搜索技术不需要划分子问题,也不需要递归求解子问题。所谓搜索,就是列举可能的情况,继而在这些情况中选择符合要求的结果作为问题的解。但搜索与暴力穷举不同的是,穷举是无目的性的,列举所有可能的情况直到选出符合条件的结果。而搜索是一种有目的的穷举,利用了状态空间模型,将问题转化为状态空间图,设计特定的遍历算法在状态空间中寻求问题的解。
一、无信息搜索
无信息的搜索盲目性较强,最基本的就是DFS和BFS两种经典遍历算法
1、DFS(深度优先搜索)
DFS利用栈或者递归函数来实现,形象表述为“一条路走到黑”。
这个算法会尽可能深地搜索树的分支。当节点v的所在边都已被探寻过,搜索将回溯到发现节点v的那条边的起始节点。这一过程一直进行到已发现从源节点可达的所有节点为止。如果还存在未被发现的节点,则选择其中一个作为源节点并重复以上过程,整个进程反复进行直到所有节点都被访问为止。
以下是深度优先搜索的基本步骤:
1、从一个未访问的顶点开始。
2、选择一条从该顶点出发的未探索过的边,然后沿这条边走到下一个顶点。
3、如果该顶点还有未探索过的边,则选择其中一条继续深度优先搜索。
4、如果没有未探索过的边,则回溯到前一个顶点,直到找到还有未探索过的边的顶点。
5、重复以上步骤,直到所有顶点都被访问过。
2、BFS(广度优先搜索)
BFS实现利用的是队列,形象表述为“一层一层走”。
广度优先搜索会首先访问离根节点(或任意选定的起始节点)最近的节点,然后逐层向外扩展,直到访问到所有节点。
以下是广度优先搜索的基本步骤:
从一个起始节点开始,将其标记为已访问,并将其加入到一个队列中。
当队列不为空时,执行以下步骤:
a. 从队列中取出一个节点。
b. 访问该节点的所有未访问过的邻居节点,并将它们标记为已访问,然后加入到队列中。
重复步骤2,直到队列为空,即所有可达节点都已被访问。
3、比较
深度优先搜索更可能找到一个可行解,占内存少,但速度慢,不确定性强;
广度优先搜索占内存多,但速度快,当结点到跟结点的费用(耗散值)和结点的深度成正比时,能较快得到最优解。
无论是DFS还是BFS都是简单的遍历算法,一定程度上体现了遍历的“有目的性”,但是表现出来的目的性不强,残留了较多原始人“枚举”的气息,导致在很多具体问题的求解过程中显得臃肿乏力。
二、有信息搜索
为了为提高搜索的效率,可在遍历状态空间时加入优化技术
1.搜索前
根据条件进行筛选,降低搜索规模
2.剪枝策略
(1)根据(问题的)约束条件,避免不必要的搜索
(2)减少对搜索过程里中间解的重复计算
3、启发式策略
加速朝目标状态逼近的速度
三、爬山算法
基本思想
爬山法本质上是局部择优的贪心搜索算法,是运用了贪心策略来优化的深度优先算法。贪心性表现在选择的侧重性上,通过启发式评价函数来确定走哪条路。
算法通过评估当下即将做出的选择中,哪一种看起来是最优的(使得状态更优),从而做出选择,如果即将做出的选择中没有好的选择的(就是不论怎么选状态都会变差时)或者已经到达了最优解时,该算法停止。
举例
游戏开始后,玩家随机处于某一个状态,每次给出若干个选项,如+1、+2、-3、+4,选择后就能得到相应的金币。那么怎么样使得我们获得的金币是最多的呢?由于未来是不可预测的,所以我们总是做出当下最好的选择,即选择+4,因为这个对于我们来说是当下最优的选择。按照这种方式一直选,直到我们遇到的选项全是负的,如-1、-2、-3、-4时,我们不做选择,停止游戏,及时止损。这种就是贪心策略,基于这种策略,在平均运气的条件下,我们能保证获得的金币不会很低。
但是这种策略能保证我们获得的金币是最多的吗?显然不一定,因为人们无法预测未来,实际上当下的贪婪并不能保证成为最后的赢家,每一次选择都是一次博弈,虽然我们第一次选择的是最多的+4,但是有可能以后出现的都是+1、+2这些不大的数,甚至很快之后就出现全为负数的选择。而第一次选+1后,也有可能突然冒出个+100的选项,从而使得金币数多于第一次选择+4的情况。贪心的局限性固然存在,但是生而为人,我们没有理由抱着逆反的心态专门挑金币少的来选,以期望下一次会得到命运的眷顾。我们能做的,就是做出当下最好的选择,尽人事,听天命。这样的话,我们虽然无法保证我们的人生是最优解,但是至少,我们有自信的说出我们是局部最优。
步骤
一言以蔽之,就是“只往高处走”
算法每次从当前的节点开始,与周围的邻接点进行比较:
若当前节点是使得状态最优的,即邻接节点都使得状态变差,那么返回当前节点,作为最大值(已经到达了顶点)
若当前节点不是使得状态最优的,就用最高的邻接点替换当前节点,从而实现向山峰的高处攀爬的目的
如此循环往复,直到达到最高点为止。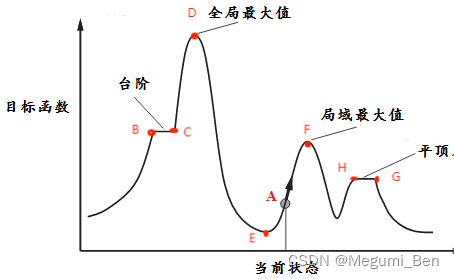
处在当前状态A时,假定我们有两种选择,一种是向下走1步(左边),一种是向上走2步(右边),基于贪心策略,我们选择最大的,即向上走两步,然后我们到达了极值点(小山峰),此时无论我们做出何种选择,我们今后都是向下走的,此时我们就认为到达了顶峰,这个就是局部最优解。实际上,当我们开始时选择向下走1步(即左边)时,虽然暂时走到了低谷,但是后面这个方向会出现一个向上6步的,从而到达真正的最高点(最优解)。我们想让评估函数尽可能的大,但是实际上我们的贪心策略无法保证我们找到最优解,很多情况下我们找到的只是极值点(局部最优)而不是最值点(最优),而这就是爬山法的局限性。
优劣
优势:当不清楚正解、或者状态维度多时适用;对单峰函数可行
缺点:
1、容易陷入局部最优解
2、容易陷入死循环:
回到上图的“台阶”部分。假定我们从图片最左边开始走,一直走到了半山腰的台阶,此时我们的选项里,没有使得状态函数增加的选择,最好的情况也使得做出选择后的状态和现在一样而不能变的更好。在这种“平坦”区域,我们是接受这种原地踏步的选择还是直接结束呢?显然,一般人都会选择继续。至少,当下的选择对于我们而言,即使没有对状态的改善,但至少没有发生损失。因此,我们继续往前走,从B点到C点以后,就又出现了使得状态更优的选择,之后我们来到了D,得出了最优解,所以这种接受平坦状态的决策更有利于找到最优解。
但是接受平坦状态也有弊端,高原问题就是其中之一。假使我处在右边平顶区域中的H点,接受的最好状态就是平坦状态,过渡到G点,而对于G点而言,最好的状态也只能是平坦状态H点。至此,求解过程就会在这两个选择中反复横跳,陷入死循环。
尾话
爬山算法是贪心的深度优先搜索算法,本质上是梯度下降,在8皇后、8数码等问题中有一席之地。与此同时,爬山法的弊端是容易陷入局部最优解或者进入死循环。为了避免这些弊端,我们又对爬山算法进行改进,这就是后来的随机重启算法和模拟退火算法,详情见下一节。感谢阅读

技术共进,成长同行——讯飞AI开发者社区
更多推荐

 15
15 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)