
UE4 Cinecamera焦距、视野、感应器尺寸之间的数学关系
UE4 Cinecamera焦距、视野、感应器尺寸之间的数学关系
·
(式1) F = (S/2) / tan(FOV/2) 相机FOV与焦距的关系
其中F是焦距,S是感光元件宽度,FOV是视场角
(式2) W=tan(FOV/2)*Lx2 距离相机距离为L处所能成像的图像宽度为W
其中FOV是视场角,L是相机视锥的透视距离
根据(式1)(式2)得:
W=L/F*S,W/S=L/F
符合成像的等比关系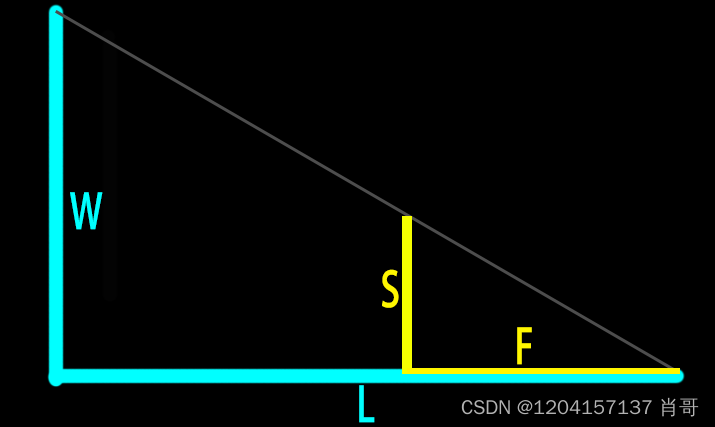

技术共进,成长同行——讯飞AI开发者社区
更多推荐


 0
0 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)