
(一)【环境搭建】Ubuntu22.04操作系统软件安装
作者之前使用的是搜狗输入法,最近发现百度输入法也支持LInux版本了,于是尝试使用一下百度输入法。ros-apt-source 软件包为各个 ROS 软件包仓库提供密钥和 apt 源配置。安装 ros2-apt-source 软件包将为您的系统配置 ROS 2 软件包仓库。当该软件包的新版本发布到 ROS 仓库时,仓库配置的更新将自动进行。4. 通过命令行安装百度输入法,重启完成即可使用(如果没有
(一)【环境搭建】Ubuntu22.04操作系统软件安装
引言
作者使用的操作系统版本是Ubuntu22.04.5 LTS,使用lsb_release -a查看。(没有在虚拟机上安装)
安装百度输入法
作者之前使用的是搜狗输入法,最近发现百度输入法也支持LInux版本了,于是尝试使用一下百度输入法。就目前使用习惯上而言,个人感觉百度输入法比搜狗输入法在Ubuntu操作系统上的用户体验要好很多。(官方说明支持Ubuntu18.04、18.10、19.04、19.10,实测下来22.04使用没有问题)
百度输入法官方下载地址:百度输入法
百度输入法官方安装步骤如下:
- 通过命令行安装aptitude
sudo apt-get install aptitude
- 通过命令行利用aptitude 安装fcitx、qt
sudo aptitude install fcitx-bin fcitx-table fcitx-config-gtk fcitx-config-gtk2 fcitx-frontend-all
sudo aptitude install qt5-default qtcreator qml-module-qtquick-controls2
sudo apt-get install libqt5qml5 libqt5quick5 libqt5quickwidgets5 qml-module-qtquick2
sudo apt install libgsettings-qt1
- 安装中文支持包
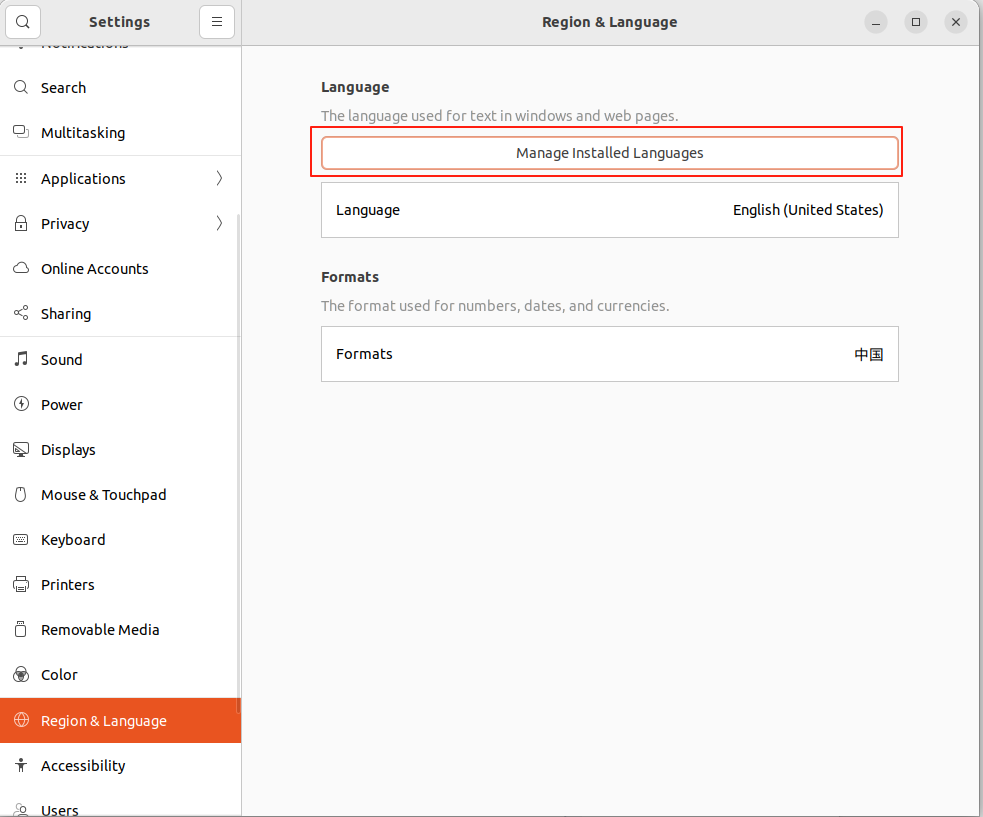
打开setting-> Region & Lannguage -> Language下的Manage installation Language
点击Installation/ Remove,勾选中文(简体),并点击应用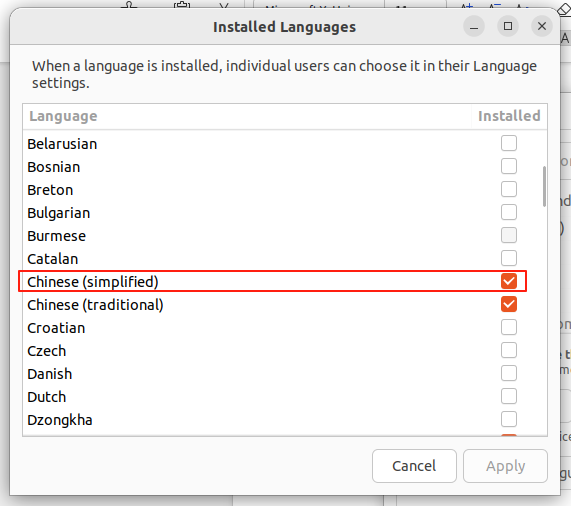
keyboard input method system选择:fcitx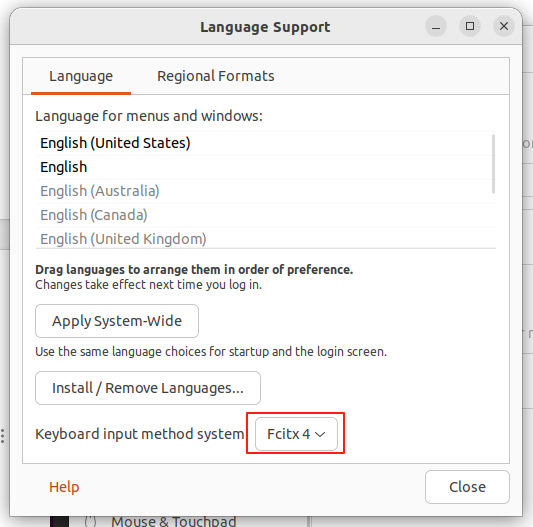
点击Apply System-Wide,然后重启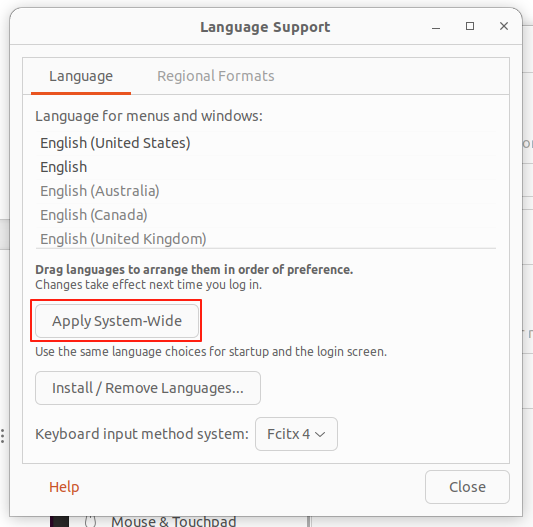
4. 通过命令行安装百度输入法,重启完成即可使用(如果没有,需在右上角fcitx配置中添加百度输入法)
sudo dpkg –i fcitx-baidupinyin.deb

安装ROS2 Humble
ROS2 Documentation:ROS2 Documentation
ROS2 Humble官方安装步骤如下:
- 区域设置
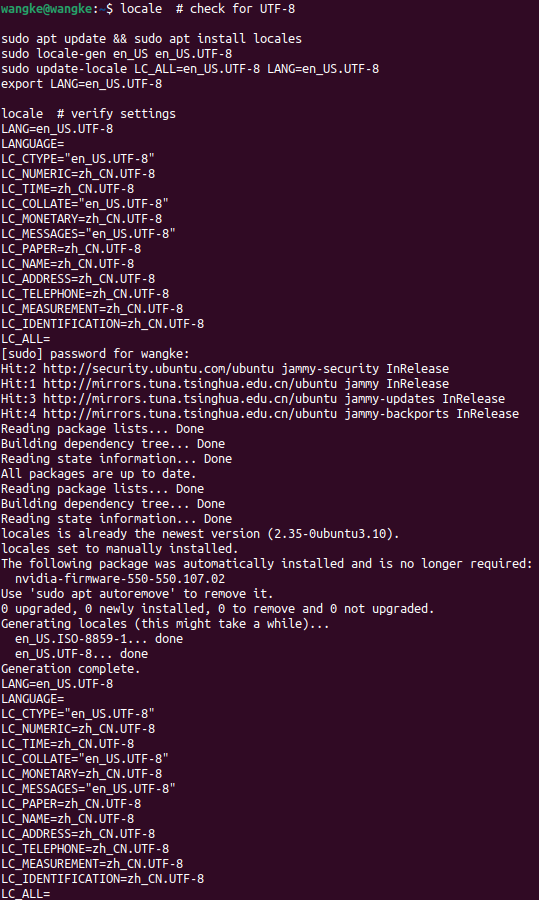
请确保您使用的区域设置支持 UTF-8。如果您处于最小化环境(例如 Docker 容器)中,区域设置可能是像 POSIX 这样的最小化配置。我们使用以下设置进行了测试,但如果您使用其他支持 UTF-8 的区域设置,通常也不会有问题。
locale # check for UTF-8
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
locale # verify settings
2. 设置源
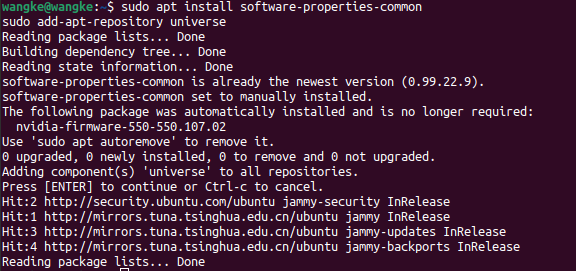
需要将 ROS 2 的 apt 软件包仓库添加到系统中。首先确保已启用 Ubuntu 的 Universe 软件包仓库。
sudo apt install software-properties-common
sudo add-apt-repository universe
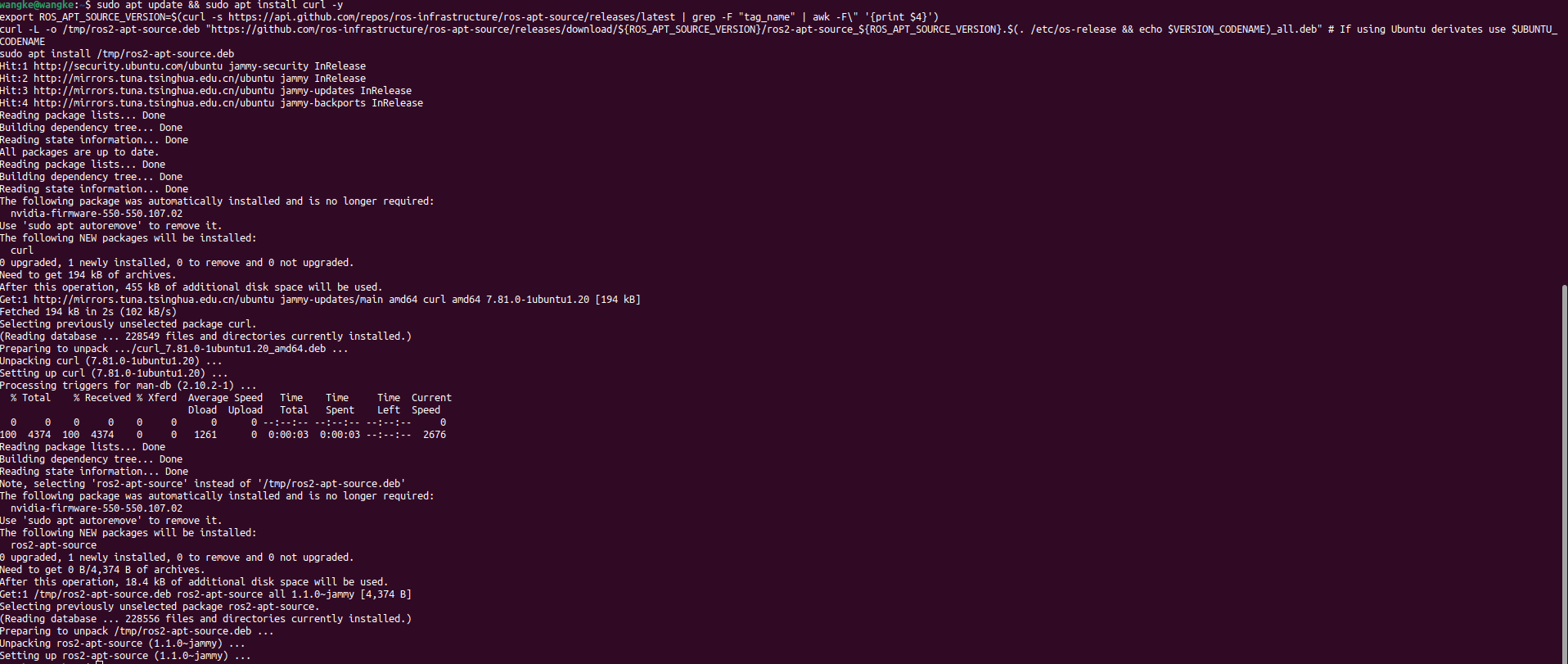
ros-apt-source 软件包为各个 ROS 软件包仓库提供密钥和 apt 源配置。安装 ros2-apt-source 软件包将为您的系统配置 ROS 2 软件包仓库。当该软件包的新版本发布到 ROS 仓库时,仓库配置的更新将自动进行。
sudo apt update && sudo apt install curl -y
export ROS_APT_SOURCE_VERSION=$(curl -s https://api.github.com/repos/ros-infrastructure/ros-apt-source/releases/latest | grep -F "tag_name" | awk -F\" '{print $4}')
curl -L -o /tmp/ros2-apt-source.deb "https://github.com/ros-infrastructure/ros-apt-source/releases/download/${ROS_APT_SOURCE_VERSION}/ros2-apt-source_${ROS_APT_SOURCE_VERSION}.$(. /etc/os-release && echo $VERSION_CODENAME)_all.deb" # If using Ubuntu derivates use $UBUNTU_CODENAME
sudo apt install /tmp/ros2-apt-source.deb
 3. 安装ROS 2软件包
3. 安装ROS 2软件包
设置好软件包仓库后,请更新您的 apt 仓库缓存。
sudo apt update
ROS 2 软件包基于频繁更新的 Ubuntu 系统构建。强烈建议您在安装新软件包之前,确保系统已更新至最新状态。
sudo apt upgrade
桌面安装(推荐):包含 ROS、RViz、演示程序和教程。
sudo apt install ros-humble-desktop
4. 环境设置
执行安装脚本,通过执行以下文件来设置环境。
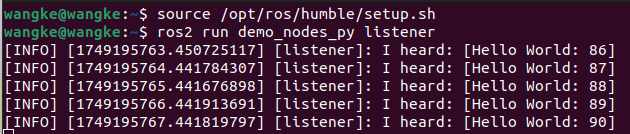
source /opt/ros/humble/setup.bash
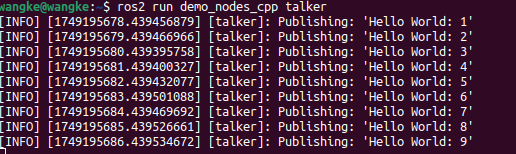
- 尝试一些示例,至此ROS2 Humble已经完成安装。
安装Visual Studio Code
Visual Studio Code官网:Visual Studio Code
sudo dpkg -i code_1.100.3-1748872405_amd64.deb

技术共进,成长同行——讯飞AI开发者社区
更多推荐
 23
23 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)