
人工智能通识与实践 - 智能机器人
智能机器人是能够自主感知环境、自主逻辑判断、自主控制执行和自主学习的人造机器或机械电子装置,核心是具备“自主决策与执行”能力,而非单纯依赖外部指令。
·
1 智能机器人的概念
1.1 智能机器人定义与发展背景
1.1.1 定义
智能机器人是能够自主感知环境、自主逻辑判断、自主控制执行和自主学习的人造机器或机械电子装置,核心是具备“自主决策与执行”能力,而非单纯依赖外部指令。
1.1.2 发展背景与关键事件
- 1920年:捷克剧作家卡佩克在剧本《罗萨姆的万能机器人》中首次创造“Robot”一词;
- 1940年:科幻作家阿西莫夫发表《罗比Robbie》,探讨机器人与人类的关系;
- 1942年:阿西莫夫在《转圈圈Runaround》中提出“机器人三原则”,成为机器人伦理的核心基础:
- 机器人不得伤害人类,或看到人类受到伤害而袖手旁观;
- 机器人必须服从人类的命令,除非该命令与第一条矛盾;
- 机器人必须保护自己,除非这种保护与前两条矛盾;
- 2016年:深圳高交会上,机器人“小胖”因故障自主破坏展台、划伤路人,凸显机器人安全与控制的重要性。
1.2 智能机器人的三要素
智能机器人的核心能力由“感觉、反应、思考”三要素构成,三者协同实现自主智能:
- 感觉要素:通过传感器(视觉、听觉、触觉等)感知外部环境信息;
- 反应要素:通过执行机构(机械臂、轮子等)做出动作响应;
- 思考要素:通过计算机系统进行逻辑判断、决策与学习。
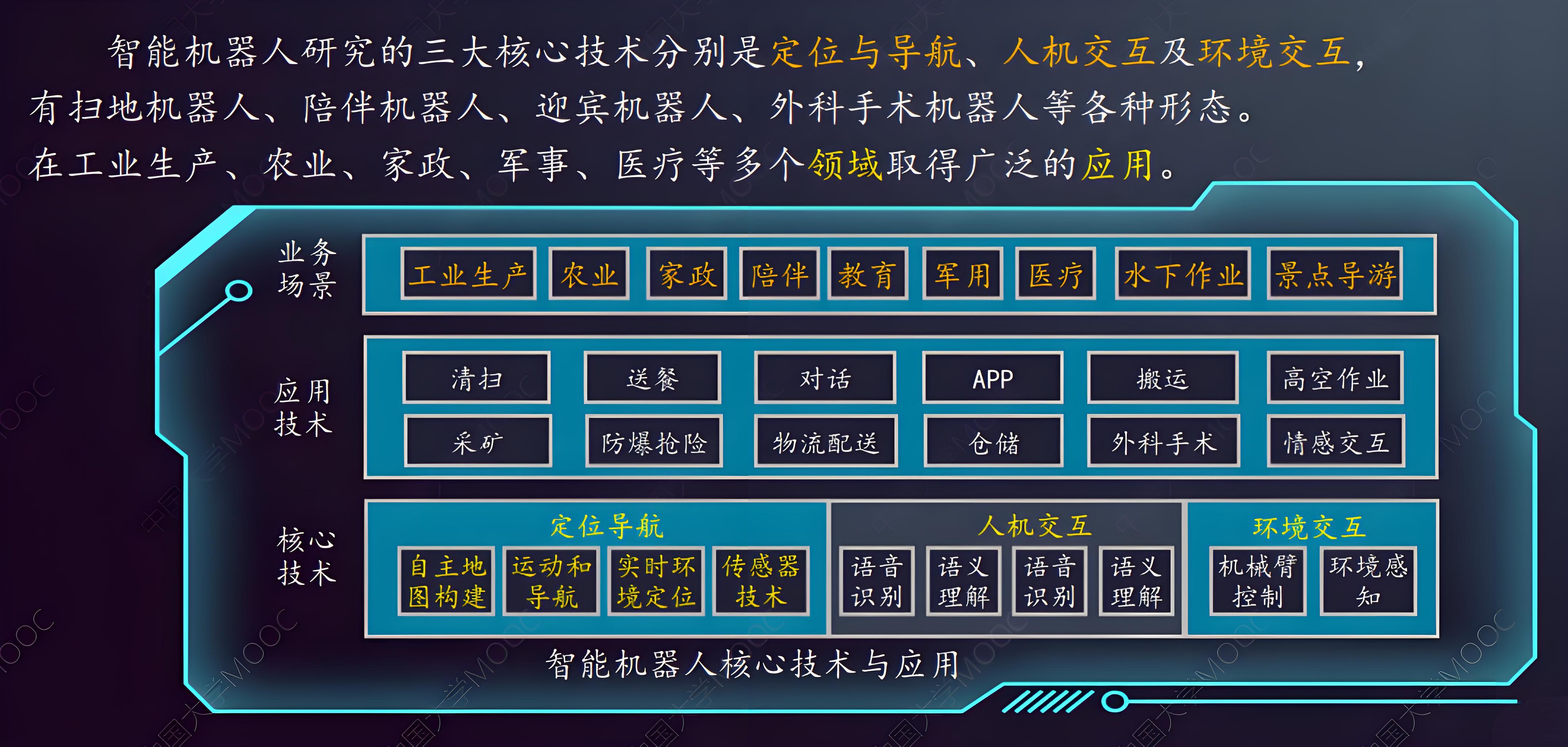
1.3 核心技术与应用框架
智能机器人的技术体系围绕“核心技术-应用技术-业务场景”展开,形成完整落地链路:
- 核心技术:定位与导航、人机交互、环境交互(三大核心),配套传感器技术、语音识别、语义理解、机械臂控制、实时环境定位等;
- 应用技术:自主地图构建、情感交互、物流配送、外科手术、防爆抢险、仓储搬运等;
- 业务场景:工业生产、农业、家政、陪伴、教育、军用、医疗、水下作业、景点导游、高空作业等。
1.4 智能机器人的分类
根据“应用领域”和“智能程度”,智能机器人可分为不同类型:
1.4.1 按应用领域分类
- 工业机器人:用于工业生产场景(如焊接、搬运、装配);
- 服务机器人:用于服务人类生活或专业领域(如家政、医疗、军事);
- 无人驾驶汽车:具备自主行驶能力的轮式移动机器人。
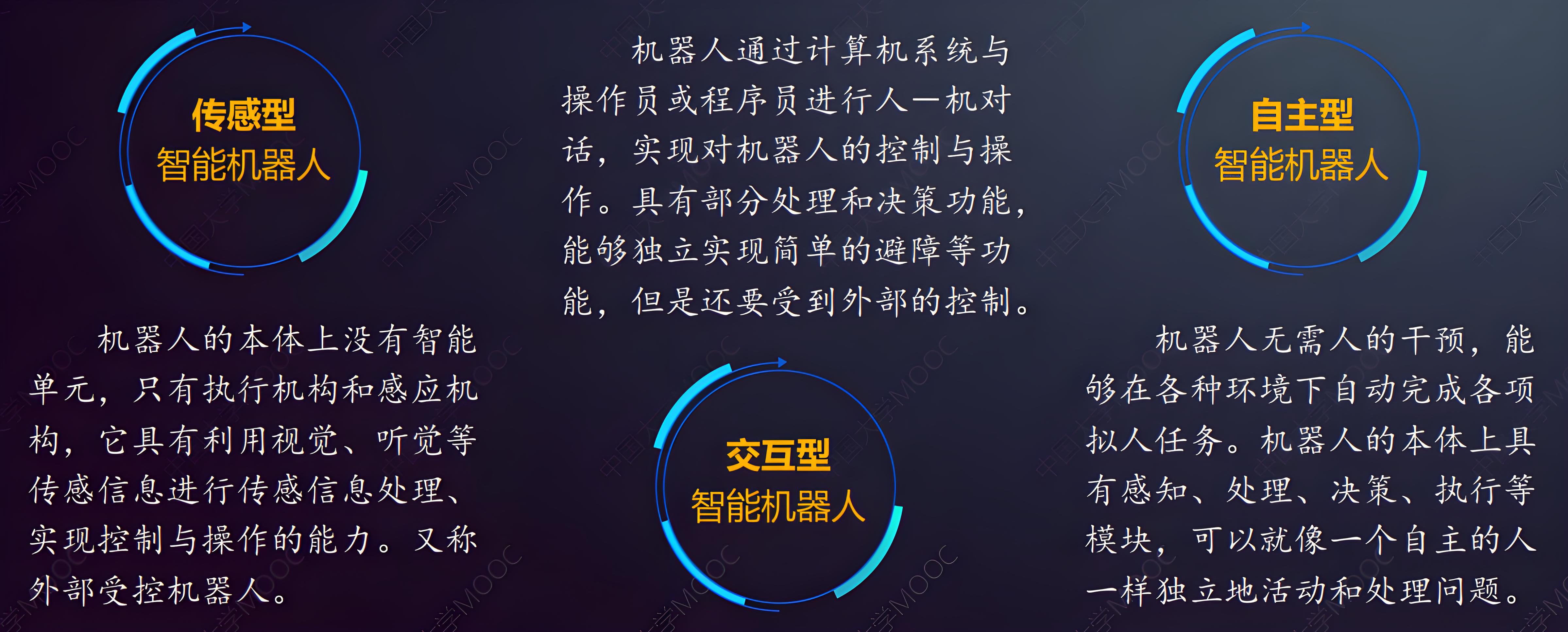
1.4.2 按智能程度分类
| 类型 | 核心特点 | 功能边界 |
|---|---|---|
| 传感型智能机器人 | 无本体智能单元,仅含执行机构与感应机构,依赖外部控制 | 可利用传感信息(视觉、听觉)处理简单任务,无自主决策能力 |
| 交互型智能机器人 | 含计算机系统,可与人机对话,具备部分处理/决策功能 | 能独立实现避障等简单操作,但仍需外部干预(如操作员控制) |
| 自主型智能机器人 | 本体集成感知、处理、决策、执行模块,无需人工干预 | 可在复杂环境下自动完成拟人任务,如自主导航、独立解决问题 |
1.5 关键技术
智能机器人的自主能力依赖六大关键技术支撑,覆盖“感知-决策-执行-交互”全流程:
- 多传感器信息融合:综合多个传感器数据(如视觉、触觉、雷达),生成更可靠、全面的环境信息,具备冗余性、互补性、实时性、低成本性;
- 导航与定位:通过环境理解(识别人为路标/实物)实现全局定位,实时检测障碍物/目标,保障工作安全;
- 路径规划:依据“路径最短、时间最少、代价最低”等准则,在工作空间中规划避开障碍物的最优路径;
- 机器人视觉:由摄像机、图像采集卡、计算机组成,核心任务是图像获取、处理分析、特征提取、图像分割与辨识,是机器人智能化的核心标志;
- 智能控制:提升机器人速度与精度,但存在局限(如模糊控制规则库庞大则推理慢,规则简单则精度低);
- 人机接口技术:实现“人-机自然交流”,要求机器人具备文字识别、语音交互、多语言翻译能力,依赖友好的人机界面与知识表示方法。
1.6 重点发展领域(《机器人产业发展规划》)
国家《机器人产业发展规划》明确十大标志性产品,聚焦工业与服务机器人中高端领域:
- 工业机器人领域(6类):弧焊机器人、真空(洁净)机器人、全自主编程智能工业机器人、人机协作机器人、双臂机器人、重载AGV,推动智能生产与物流;
- 服务机器人领域(4类):消防救援机器人、手术机器人、智能型公共服务机器人、智能护理机器人,推进专业服务机器人系列化、家用机器人商品化。
2 工业机器人及应用
2.1 工业机器人定义
根据国际标准化组织(ISO)定义,工业机器人是能自动控制、可重复编程、多功能、多自由度的操作机,可通过搬运材料、工件或操持工具完成各类工业作业(如焊接、装配、分拣)。
2.2 工业机器人的特点
工业机器人具备四大核心特点,适配工业生产的自动化、柔性化需求:
- 拟人化:机械结构模拟人类手臂或其他作业结构(如多关节机械臂);
- 通用性:可通过修改程序执行不同任务,适应多场景作业;
- 独立性:完整系统工作时无需人工干预,实现全自动生产;
- 智能性:具备不同程度的智能(如路径规划、故障自检)。
2.3 典型示例:移动机器人(AGV)
AGV(Automated Guided Vehicle)是工业机器人的重要类型,核心特点与应用如下:
- 核心功能:由计算机控制,具备移动、自动导航、多传感器控制、网络交互能力;
- 应用行业:机械、电子、纺织、卷烟、医疗、食品、造纸等,用于柔性搬运、传输;
- 具体场景:自动化立体仓库、柔性加工/装配系统(作为活动装配平台)、车站/机场/邮局的物品分拣运输。
2.4 工业机器人的未来趋势
- 智能化升级:智能工业机器人成为技术制高点与经济增长点,融合AI技术提升自主决策与适应能力;
- 市场增长:中国是全球机器人行业增长最快的市场,预计未来两年内超越日本,成为全球最大工业机器人市场;
- 巨头布局:谷歌等科技公司通过收购机器人技术公司加大投入,推动行业技术突破。
3 服务机器人及应用
3.1 服务机器人定义
根据国际机器人联合会定义,服务机器人是半自主或全自主工作的机器人,核心功能是完成“有益于人类健康的服务工作”(不含工业生产设备),分为两类:
- 专业领域服务机器人:用于医疗、军事、太空等专业场景;
- 个人/家庭服务机器人:用于家政、陪伴等家庭场景。
3.2 服务机器人的典型应用场景
3.2.1 军事领域
- 山地仿生四足机器人(中国北方工业公司):适应复杂山地地形,执行侦察、运输任务;
- 履带式军用机器人:可在恶劣战场环境中执行排爆、巡逻任务。
3.2.2 太空领域
- 先进太空机械臂:用于航天器维护、舱外作业(如空间站设备安装与维修)。
3.2.3 医疗领域
- 达芬奇手术机器人:具备高精度操作能力,可完成复杂外科手术(如缝合葡萄皮,体现超高精细度)。
3.2.4 家政领域
- 功能覆盖:炒菜、洗衣、送餐等家庭服务,减轻家务劳动负担。
4 自动驾驶汽车
4.1 自动驾驶汽车定义与核心原理
4.1.1 定义
自动驾驶汽车(又称无人驾驶汽车、轮式移动机器人)是通过电脑系统实现无人驾驶的智能汽车,曾参与2022年北京冬奥会火炬接力活动。
4.1.2 核心原理
- 感知层:通过车载传感器(视觉摄像头、雷达、监控装置)感知周围环境;
- 决策层:依赖人工智能、视觉计算、全球定位系统(GPS)协同合作,分析环境信息并制定行驶策略;
- 执行层:无需人类操作,自动控制车辆行驶(加速、刹车、转向)。
4.2 自动驾驶分级(SAE标准)
美国汽车工程师学会(SAE)将自动驾驶分为5级,明确不同等级的“驾驶操作、周边监控、支援责任”与应用场景,目前量产车最高接近L3级:
| 分级 | 等级名称 | 驾驶操作主体 | 周边监控主体 | 支援责任主体 | 应用场景 | 量产车现状 |
|---|---|---|---|---|---|---|
| L0 | 人工驾驶 | 驾驶员 | 驾驶员 | 无 | - | - |
| L1 | 辅助驾驶 | 车辆 | 驾驶员 | 驾驶员 | - | 常规量产车 |
| L2 | 部分自动驾驶 | 车辆 | 驾驶员 | 驾驶员 | 限定场景(如高速) | 多数智能汽车 |
| L3 | 条件自动驾驶 | 车辆 | 车辆 | 驾驶员 | 特定场景 | 接近L3(如特斯拉) |
| L4 | 高度自动驾驶 | 车辆 | 车辆 | 车辆 | 多数场景 | 测试阶段 |
| L5 | 完全自动驾驶 | 车辆 | 车辆 | 车辆 | 所有场景 | 研发阶段 |

技术共进,成长同行——讯飞AI开发者社区
更多推荐

 13
13 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)