
opencv之绘制图像轮廓和凸包特征检测(五)
将集中的点进行两两配对,并进行连线,对于每条直线,检查其余所有的点是否处于该直线的同一侧,如果是,那么说明构成该直线的两个点就是凸包点,其余的线依次进行计算,从而获取所有的凸包点。通俗的讲,凸包其实就是将一张图片中物体的最外层的点连接起来构成的凸多边形,它能包含物体中所有的内容。并且在hierarchy里的轮廓关系中,每一个轮廓只有前一条轮廓与后一条轮廓的索引,而没有父轮廓与子轮廓的索引。并且在h
opencv之绘制图像轮廓和凸包特征检测(五)
文章目录
一、绘制图像轮廓
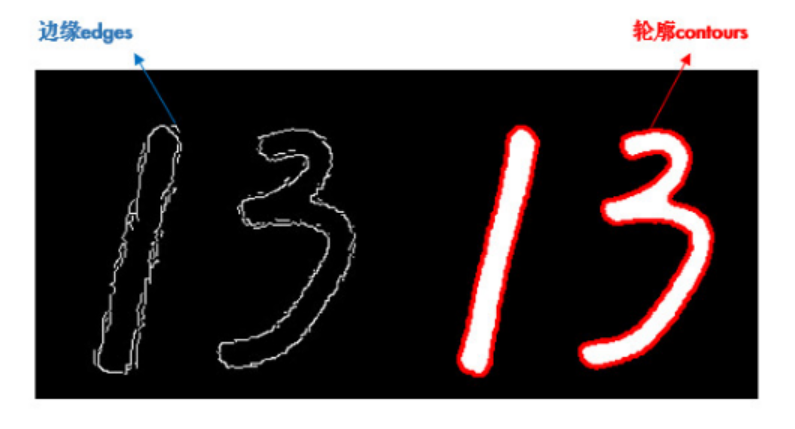
轮廓是一系列相连的点组成的曲线,代表了物体的基本外形。相对于边缘,轮廓是连续的,边缘不一定连续,如下图所示。轮廓是一个闭合的、封闭的形状。
- 轮廓的作用:
- 形状分析
- 目标识别
- 图像分割
在OpenCV中,使用 cv2.findContours() 来进行寻找轮廓
下面具体介绍一下 cv2.findContours() 函数,其函数原型为:
contours,hierarchy = cv2.findContours(image,mode,method)
-
返回值:[ 轮廓点坐标 ] 和 [ 层级关系 ]。
-
contours:表示获取到的轮廓点的列表。检测到有多少个轮廓,该列表就有多少子列表,每一个子列表都代表了一个轮廓中所有点的坐标。
-
hierarchy:表示轮廓之间的关系。对于第i条轮廓, h i e r a r c h y [ i ] [ 0 ] hierarchy[i][0] hierarchy[i][0], h i e r a r c h y [ i ] [ 1 ] hierarchy[i][1] hierarchy[i][1] , h i e r a r c h y [ i ] [ 2 ] hierarchy[i][2] hierarchy[i][2] ,$ hierarchy[i][3]$分别表示其后一条轮廓、前一条轮廓、(同层次的第一个)子轮廓、父轮廓的索引(如果没有相应的轮廓,则对应位置为-1)。该参数的使用情况会比较少。
-
image:表示输入的二值化图像。
-
mode:表示轮廓的检索模式。
-
method:轮廓的表示方法。
1.1 mode参数
mode参数共有四个选项分别为:RETR_LIST,RETR_EXTERNAL,RETR_CCOMP,RETR_TREE。
- RETR_EXTERNAL
表示只查找最外层的轮廓。并且在hierarchy里的轮廓关系中,每一个轮廓只有前一条轮廓与后一条轮廓的索引,而没有父轮廓与子轮廓的索引。
2.3.4.会查找所有轮廓,但会有层级关系。
- RETR_LIST
表示列出所有的轮廓。并且在hierarchy里的轮廓关系中,每一个轮廓只有前一条轮廓与后一条轮廓的索引,而没有父轮廓与子轮廓的索引。
- RETR_CCOMP
表示列出所有的轮廓。并且在hierarchy里的轮廓关系中,轮廓会按照成对的方式显示。
在 RETR_CCOMP 模式下,轮廓被分为两个层级:
- 层级 0:所有外部轮廓(最外层的边界)。
- 层级 1:所有内部轮廓(孔洞或嵌套的区域)。
- RETR_TREE
表示列出所有的轮廓。并且在hierarchy里的轮廓关系中,轮廓会按照树的方式显示,其中最外层的轮廓作为树根,其子轮廓是一个个的树枝。
1.2 method参数
轮廓存储方法。轮廓近似方法。决定如何简化轮廓点的数量。就是找到轮廓后怎么去存储这些点。
method参数有三个选项:CHAIN_APPROX_NONE、CHAIN_APPROX_SIMPLE、CHAIN_APPROX_TC89_L1。
-
CHAIN_APPROX_NONE表示将所有的轮廓点都进行存储 -
CHAIN_APPROX_SIMPLE表示只存储有用的点,比如直线只存储起点和终点,四边形只存储四个顶点,默认使用这个方法;
对于mode和method这两个参数来说,一般使用RETR_EXTERNAL和CHAIN_APPROX_SIMPLE这两个选项。
1.3 绘制轮廓
轮廓找出来后,其实返回的是一个轮廓点坐标的列表,因此我们需要根据这些坐标将轮廓画出来,因此就用到了绘制轮廓的方法。
cv2.drawContours(image, contours, contourIdx, color, thickness)
- image:原始图像,一般为单通道或三通道的 numpy 数组。
- contours:包含多个轮廓的列表,每个轮廓本身也是一个由点坐标构成的二维数组(numpy数组)。
- contourIdx:要绘制的轮廓索引。如果设为
-1,则会绘制所有轮廓。根据索引找到轮廓点绘制出来。默认是-1。 - color:绘制轮廓的颜色,可以是 BGR 值或者是灰度值(对于灰度图像)。
- thickness:轮廓线的宽度,如果是正数,则画实线;如果是负数,则填充轮廓内的区域。
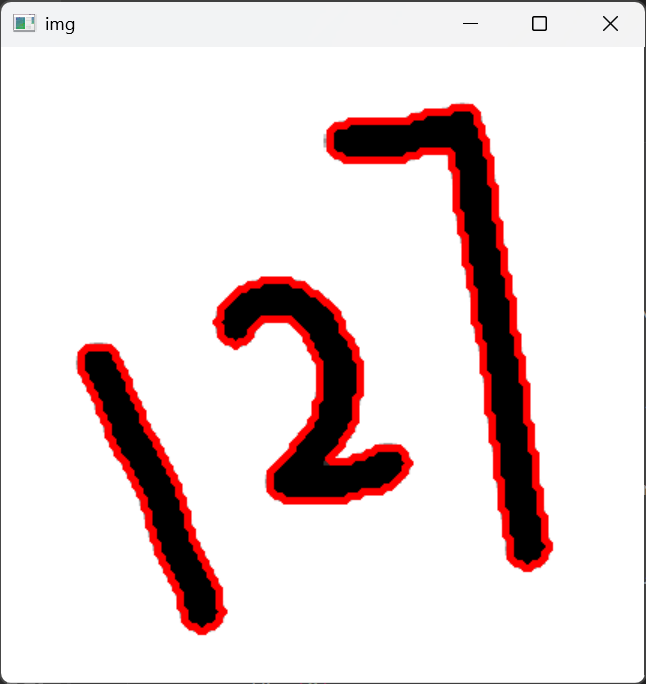
案例
import cv2 as cv
import numpy as np
# 读取图像
img = cv.imread("images/num.png")
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# 二值化
binary = cv.threshold(gray, 127, 255, cv.THRESH_OTSU + cv.THRESH_BINARY_INV)[1]
# 查找轮廓
contours, hierarchy = cv.findContours(binary, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
# 绘制轮廓
cv.drawContours(img, contours, -1, (0, 0, 255), 3)
# 显示结果
cv.imshow("img", img)
cv.waitKey(0)
cv.destroyAllWindows()
二、凸包特征检测
在进行凸包特征检测之前,首先要了解什么是凸包。通俗的讲,凸包其实就是将一张图片中物体的最外层的点连接起来构成的凸多边形,它能包含物体中所有的内容。
一般来说,凸包都是伴随着某类点集存在的,也被称为某个点集的凸包。
对于一个点集来说,如果该点集存在凸包,那么这个点集里面的所有点要么在凸包上,要么在凸包内。
凸包检测常用在物体识别、手势识别、边界检测等领域。
-
穷举法
-
QuickHull法
2.1 穷举法
-
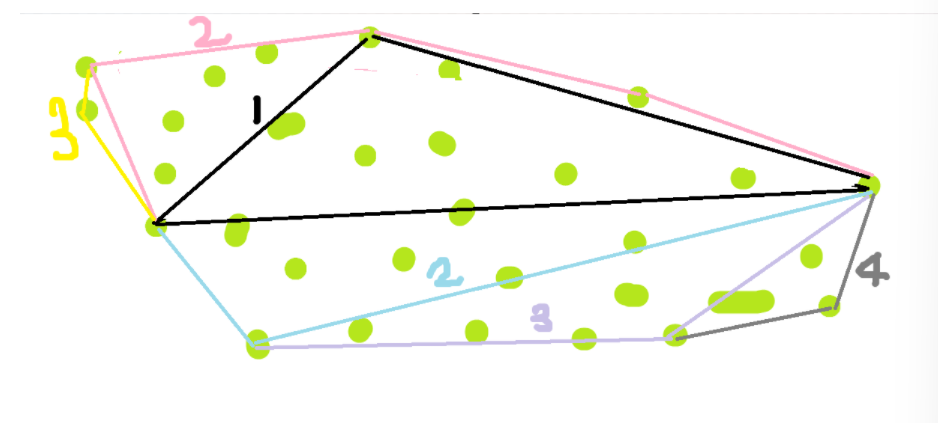
将集中的点进行两两配对,并进行连线,对于每条直线,检查其余所有的点是否处于该直线的同一侧,如果是,那么说明构成该直线的两个点就是凸包点,其余的线依次进行计算,从而获取所有的凸包点。
-
用向量的思想,点都是有坐标的,连起来就可以构成一个向量。再以其中一个点,连接另一个点,构成另一个向量,让两个向量做外积,就是叉积。也就是 s t d = ∣ 向量 a ∣ ∗ ∣ 向量 b ∣ ∗ s i n ( θ ) std=|向量a|*|向量b|*sin(\theta) std=∣向量a∣∗∣向量b∣∗sin(θ),能控制 s t d std std的正负的只能是 θ \theta θ,如果计算出来的 s t d std std的正负都相同,说明这些点都在这条直线的同一侧,那么这两个点就是凸包的边界点。然后换两个点,就是说换一条直线,换一个向量,继续进行检测,直到找到凸包的所有的边界点。
-
缺点:时间复杂度高,不断使用for循环,耗时。
2.2 QuickHull法
- 将所有点放在二维坐标系中,找到横坐标最小和最大的两个点 P 1 P_1 P1和 P 2 P_2 P2并连线。此时整个点集被分为两部分,直线上为上包,直线下为下包。
- 以上保暖为例,找到上包中的点距离该直线最远的点 P 3 P_3 P3,连线并寻找直线 P 1 P 3 P1P3 P1P3左侧的点和 P 2 P 3 P2P3 P2P3右侧的点,然后重复本步骤,直到找不到为止。对下包也是这样操作。
2.3 获取凸包点
cv2.convexHull(points)
points:输入参数,图像的轮廓
2.4 绘制凸包
cv2.polylines(image, pts, isClosed, color, thickness=1)
image:要绘制线条的目标图像,它应该是一个OpenCV格式的二维图像数组(如numpy数组)。pts:一个二维 numpy 数组,每个元素是一维数组,代表一个多边形的一系列顶点坐标。isClosed:布尔值,表示是否闭合多边形,如果为 True,会在最后一个顶点和第一个顶点间自动添加一条线段,形成封闭的多边形。color:线条颜色,可以是一个三元组或四元组,分别对应BGR或BGRA通道的颜色值,或者是灰度图像的一个整数值。thickness(可选):线条宽度,默认值为1。
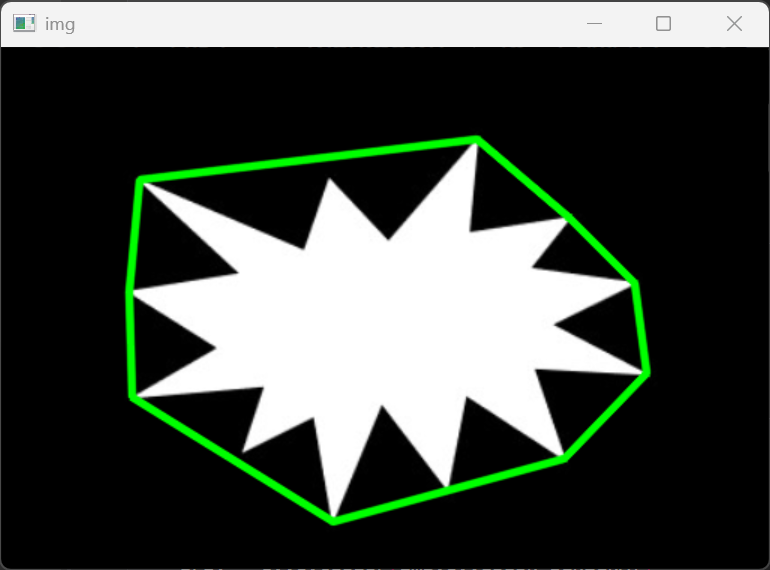
案例
import cv2 as cv
import numpy as np
img = cv.imread("images/tu.png")
gray = cv.cvtColor(img,cv.COLOR_BGR2GRAY)
# 二值化
ret,thresh1 = cv.threshold(gray,127,255,cv.THRESH_BINARY)
# 查找轮廓
contours,hierarchy = cv.findContours(thresh1,cv.RETR_EXTERNAL,cv.CHAIN_APPROX_SIMPLE)
# 寻找凸包:cv2.convexHull(points)
hull = [cv.convexHull(c) for c in contours]
# 绘制凸包轮廓cv2.polylines(img,hull,isClosed,color)
cv.polylines(img,hull,-1,(0,255,0),3,cv.LINE_AA) # cv.LINE_AA为抗锯齿
# 显示图像
cv.imshow("img",img)
cv.waitKey(0)
cv.destroyAllWindows()

技术共进,成长同行——讯飞AI开发者社区
更多推荐
 25
25 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)