
时空图神经网络4——GAT
在实际生活中,很多对象可以被看作图结构,有时候他们的边有相似但却又不同的性质。比如交通网络中,每一条道路都可以被看作边,每条路的情况却不同:有的是单行道,有的是双车道,有的是四车道,显然会对节点有不同程度的影响。那我们如何考虑这种影响?
系列文章目录
时空图神经网络1——GNN和GCN
时空图神经网络2——RNN和GRU
时序图神经网络3——T-GCN
文章目录
一、前言
在实际生活中,很多对象可以被看作图结构,有时候他们的边有相似但却又不同的性质。比如交通网络中,每一条道路都可以被看作边,每条路的情况却不同:有的是单行道,有的是双车道,有的是四车道,显然会对节点有不同程度的影响。那我们如何考虑这种影响?GATConv中包含了参数edge_attr,可以用来储存边的属性,我们一起来学习一下!
二、图注意力网络 GAT
我们之前讲过了图卷积网络GCN,图注意力网络(Graph Attention Networks, GAT)是在GCN基础上的一次改进,不再用静态的归一化系数而是通过自注意力计算的加权因子。具体来说,GCN中,邻居节点的影响是相同的,毕竟只考虑了节点的度;而在GAT中要考虑不同邻居节点的重要性。举个简单的例子:一个班有 50 个同学,相当于 50 个节点,但是只有几个同学对你的影响比较大,大多数影响不太大,还有一些近似于陌生人,说明你们之间的联系(边)很弱。
2.1 什么是注意力?
参考文献中的图注意力算子(graph attentional operator)定义如下: x ~ i = ∑ j ∈ N A α i j W x j \tilde{x}_i=\sum_{j \in \mathcal{N}_A} α_{ij} Wx_j x~i=j∈NA∑αijWxj其中 α i j α_{ij} αij 是注意力系数(attention coefficients),这部分的计算比较复杂,我们需要拆开来看。在这之前先提一个问题,自注意力又是什么呢?了解transformer的同学可能知道是什么意思,自注意力机制的核心大概可以概括为“相关性”,在图中,我们可以认为是节点之间的相关性。我们认为两个向量相乘得到的值比较大就是相关性大,两个向量相乘的值比较小就是相关性小。
举个例子即使一下,向量 a = [ 1 , 0 ] a=[1, 0] a=[1,0],向量 b = [ − 1 , 0 ] b=[-1, 0] b=[−1,0], 向量 c = [ 0 , 1 ] c=[0, 1] c=[0,1],向量 d = [ 2 , 2 ] d=[\sqrt2, \sqrt2] d=[2,2]。在二维坐标系中,我们结合图片分析这几个向量: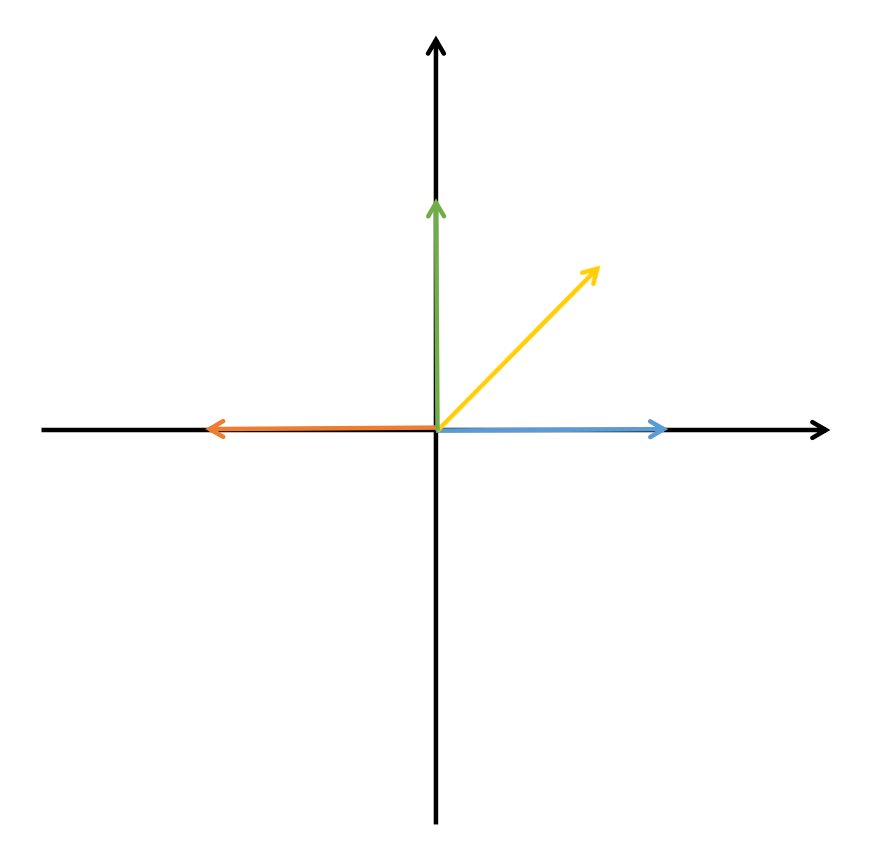
首先 a a a 和自身是有关的,而且是最有关的, a a T = 1 aa^T=1 aaT=1;
a a a 和 b b b 方向完全相反,很明显我们知道二者是负相关的,且 a b T = − 1 ab^T=-1 abT=−1;
a a a 和 c c c 二者正交,也就是相互垂直,我们知道在数学中正交代表无关,且 a c T = 0 ac^T=0 acT=0;
对于 a a a 和 d d d 来说,他们之间正相关,因为 d d d 在横轴上有投影,但是它在纵轴也有投影,总的来说, a d T = 2 ad^T=\sqrt2 adT=2,所以 a a a 和 d d d 相关(可以用 2 \sqrt2 2 描述),但是又不如 a a a 与自己相关(可以用 1 1 1 来描述)。可以看出,两个向量(矩阵)相乘得到的积就像一个“分数”,分数越高相关性越大,分数是 0 就没有相关性,分数是负的就有负相关性。我相信通过这个例子,大家应该能大概对相关性有个简单的认识。
2.2 如何计算图注意力系数?
那么,我们如何计算中心节点和邻居节点之间的相关性大小?在图注意力层中,首先使用一个共享矩阵 W W W对节点特征进行变换,也就是 W x i Wx_i Wxi和 W x j Wx_j Wxj,然后再把二者拼接(concatenate)起来(也可以不拼接,加起来也行,实际上没什么区别,官网上写的就是加起来,GRU中也有类似的拼接或者加起来的过程),再通过一个矩阵 a T \mathbf{a^T} aT进行一次变换后加了一个激活函数LeakyReLU(线性变换+激活函数属于是常规操作),得到一个实数,这个实数我们在一定程度上可以认为是注意力系数,表示如下: e i j = L e a k y R e L U ( a T [ W x i ∣ ∣ W x j ] ) e_{ij}=LeakyReLU(\mathbf{a^T}[Wx_i||Wx_j]) eij=LeakyReLU(aT[Wxi∣∣Wxj])
为什么我说是一定程度上?因为这还不是最终结果。如果模型训练好了以后,现阶段的注意力系数肯定也是能反映出相关性的大小的,但是根据惯例,我们要对其进行归一化,通常使用softmax来实现。 α i j = softmax j ( e i j ) = exp ( e i j ) ∑ k ∈ N i exp ( e i k ) \alpha_{ij} = \text{softmax}_j(e_{ij}) = \frac{\exp(e_{ij})}{\sum_{k \in \mathcal{N}_i} \exp(e_{ik})} αij=softmaxj(eij)=∑k∈Niexp(eik)exp(eij)这次我们真的得到了注意力系数,进一步我们可以得到 x ~ i \tilde{x}_i x~i。但是!但是目前的自注意力还不稳定,这是因为我们只计算了一次,权重矩阵是随机的,可能会出现问题。
2.3 多头注意力机制
为了让我们计算出来的注意力系数更稳定,我们引入多头注意力机制(multi-head attention)。“多头”注意力机制听起来很抽象,实际上可以理解为“多次”注意力。为了避免一次注意力的不稳定性,我们计算多次再综合考虑,就能大大改善效果。
只需要重复上述操作,每次都可以得到一个 x ~ i k \tilde{x}_i^k x~ik ,通过平均法和连接法可以合并计算结果。
平均法按照注意力头的数量归一化: x ~ i = 1 n ∑ k = 1 n x ~ i k = 1 n ∑ k = 1 n ∑ j ∈ N i α i j k W k x j \tilde{x}_i = \frac{1}{n} \sum_{k = 1}^{n} \tilde{x}_i^k = \frac{1}{n} \sum_{k = 1}^{n} \sum_{j \in \mathcal{N}_{i}} \alpha_{ij}^{k} W^{k} x_{j} x~i=n1k=1∑nx~ik=n1k=1∑nj∈Ni∑αijkWkxj
连接法将每个头的结果拼接起来得到更大的矩阵: x ~ i = ∥ k = 1 n x ~ i k = ∥ k = 1 n ∑ j ∈ N i α i j k W k x j \tilde{x}_i=\|_{k = 1}^{n} \tilde{x}_i^k=\|_{k = 1}^{n} \sum_{j \in \mathcal{N}_{i}} \alpha_{ij}^{k} W^{k} x_{j} x~i=∥k=1nx~ik=∥k=1nj∈Ni∑αijkWkxj
到目前为止看起来一切都结束了,所有内容都讲完了。可是我们是为什么要讲GAT来着?我们是为了考虑边的影响!
2.4 边属性的使用
在GNN中,不同模型涉及到的入参不太一样。有的存在edge_weight这个入参,有的没有,但是有edge_attr这个入参。什么区别呢?顾名思义,edge_weight表示边权重,意思就是我们已经知道某个边对中心节点的影响程度,然后给边指定上这个权重。edge_weight是一个一维张量,与edge_index的顺序一一对应,比如下面这个例子:
edge_index = torch.tensor([[0, 1, 1, 2],
[1, 0, 2, 1]], dtype=torch.long)
edge_weight = torch.tensor([0.5, 1.0, 2.0, 0.3], dtype=torch.float)
edge_index是将我们之前提到过的尺寸为[num_nodes, num_nodes]的邻接矩阵变成尺寸为[2, num_edges]的矩阵(无向图是这样的)。因为在图很大但是连接又稀疏的情况下,邻接矩阵中大部分元素是 0,其实没有意义。邻接矩阵的尺寸过大会影响计算和存储效率,所以需要进行降维。我们可以看个例子,假设有一个邻接矩阵:
adj = [[0,1,1,0,0,0,0],
[1,0,0,1,1,0,0],
[1,0,0,0,0,1,1],
[0,1,0,0,0,0,0],
[0,1,0,0,0,0,0],
[0,0,1,0,0,0,0],
[0,0,1,0,0,0,0]]
改成edge_index的形式为:
edge_index = [(0, 1), (0, 2), (1, 3), (1, 4), (2, 5), (2, 6)]
明显简洁了很多。话又说回来,edge_attr与edge_weight的区别又在哪里?edge_weight 只存储单一的权重值,edge_attr 允许存储一个向量或多维数组,更通用的表达了边的属性特征,比如下面这个例子:
edge_index = torch.tensor([[0, 1, 1, 2],
[1, 0, 2, 1]], dtype=torch.long)
edge_attr = torch.tensor([[1, 2], [3, 4], [5, 6], [7, 8]], dtype=torch.float)
引入 edge_attr 的目的在于让模型在计算注意力系数时能考虑边的特征。在很多实际场景中,边的特征(例如边的权重、类型等)能够为图的结构和节点间的关系提供额外的信息。借助将边的特征纳入注意力系数的计算,模型能够更精准地捕捉节点间的关联,从而提升模型的表达能力和性能。想知道哪些支持edge_weight 和 edge_attr 可以从GNN Cheatsheet中查看。那么在GAT中,edge_attr是如何被使用的呢?
跟节点一样。其实很好理解,对于某个几点来说,有几个邻居节点就有几个边,对边同样进行相同的注意力机制的运算,并且一起拼接或者求和即可。我们看一下官网上的公式就可以知道了,官网上用的不是拼接而是求和,但是没什么区别,一样的。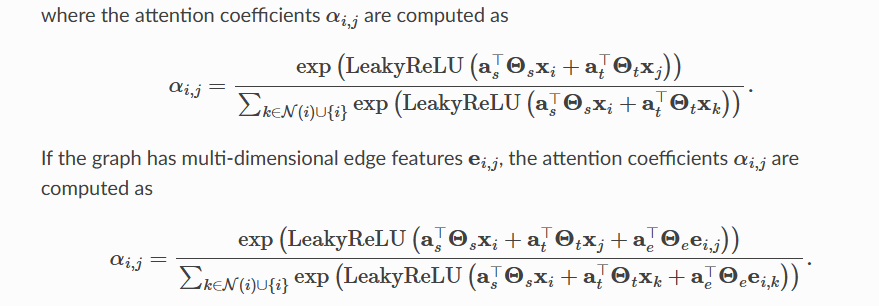
上面的式子表示没有edge_attr的情况,下面有了就一起进行相同处理即可!
2.5 GATv2Conv
GATv2Conv是改进的GAT,区别在于注意力权重矩阵在激活函数后面使用。直接看官网的式子,可以跟GAT的对比。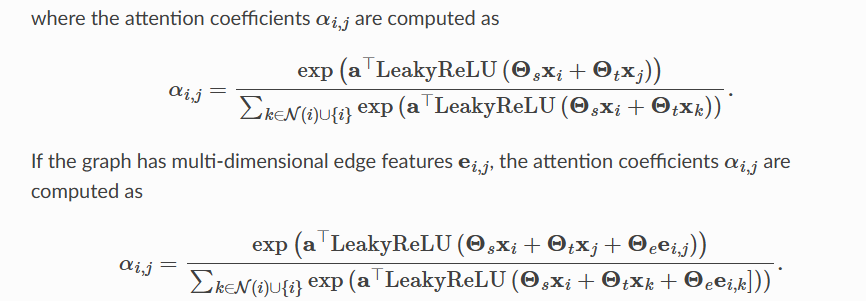
其他没区别,但是GATv2的性能使用优于GAT,所以应该优先选择GATv2。
2.6 参数介绍
以GATConv为例,我们可以直接导入:
from torch_geometric.nn.conv import GATConv
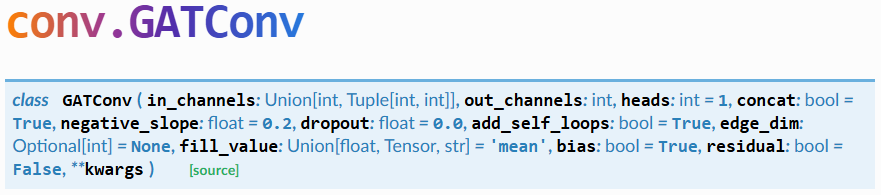
参数:
in_channels(int或tuple):每个输入样本的大小,如果设置为 -1,则会从forward方法的第一个输入中推导其大小。在二分图的情况下,元组对应源节点和目标节点的维度大小。out_channels(int):每个输出样本的大小。heads(int,可选):多头注意力的数量。(默认值:1,我觉得应该多写几个,要不然没意义了)concat(bool,可选):如果设置为False,多头注意力的结果将被平均而不是拼接。(默认值:True)negative_slope(float,可选):LeakyReLU负斜率的角度。(默认值:0.2)dropout(float,可选):归一化注意力系数的随机失活概率,在训练期间使每个节点随机采样邻居节点。(默认值:0)add_self_loops(bool,可选):如果设置为False,则不会向输入图添加自环。(默认值:True)edge_dim(int,可选):边特征的维度(如果存在的话)。(默认值:None)fill_value(float或torch.Tensor或str,可选):生成自环边特征的方式(在edge_dim != None的情况下)。如果是float或torch.Tensor,自环的边特征将直接由fill_value给出。如果是str,自环的边特征将根据指定的规约操作,通过聚合指向特定节点的所有边的特征来计算(取值为 “add”、“mean”、“min”、“max”、“mul”)。(默认值:“mean”)bias(bool,可选):如果设置为False,该层将不学习加性偏差。(默认值:True)residual(bool,可选):如果设置为True,该层将添加一个可学习的跳跃连接。(默认值:False)**kwargs(可选):conv.MessagePassing的其他参数。
形状:- 输入:节点特征为
(|V|, F_in)或二分图时为((|V_s|, F_s),(|V_t|, F_t))(二分图先不管);边索引为(2, |E|);边特征为(|E|, D)(可选)。 - 输出:节点特征为
(|V|, H*F_out)或二分图时为(|V_t|, H * F_out)。如果return_attention_weights=True,则输出为((|V|, H*F_out),((2, |E|), (|E|, H)))或二分图时为((|V_t|, H*F_out),((2, |E|),(|E|, H)))。
总结
本文介绍了图注意力网络的架构,主要目的是为了在图中考虑边属性的影响。

技术共进,成长同行——讯飞AI开发者社区
更多推荐
 15
15 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)