
MXNet卷积神经网络对图像边缘的检测
MXNet中的卷积层,以及对感受野的熟悉
·
卷积神经网络是近年来在计算机视觉领域取得突破性成果的基石,在其他领域也有着广泛使用,前面也有很多相关的文章,有兴趣的可以参看:
卷积神经网络(CNN)结尾篇:可视化跟踪(Visualize)
这节主要是在MXNet框架下,卷积层是如何进行图像特征提取的,基础的互相关运算如下:
from mxnet import autograd,nd
from mxnet.gluon import nn
#互相关运算,实质就是加权和,在d2lzh包中有定义
def corr2d(X,K):
h,w=K.shape
Y=nd.zeros((X.shape[0]-h+1,X.shape[1]-w+1))
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
Y[i,j]=(X[i:i+h,j:j+w]*K).sum()
return Y
X=nd.arange(9).reshape(3,3)
K=nd.arange(4).reshape(2,2)
print(corr2d(X,K))
'''
[[19. 25.]
[37. 43.]]
<NDArray 2x2 @cpu(0)>
'''假设图像是高宽分别为6像素和8像素的黑白照片(0为黑色,1为白色),我们将会看到输出,在相邻变化的位置有了变化
垂直方向的边缘检测
X=nd.ones((6,8))
X[:,2:6]=0 #第二列到第三列所有行,赋值为0
K=nd.array([[2,-2]]) #1x2的卷积核
Y=corr2d(X,K)
'''
[[1. 1. 0. 0. 0. 0. 1. 1.]
[1. 1. 0. 0. 0. 0. 1. 1.]
[1. 1. 0. 0. 0. 0. 1. 1.]
[1. 1. 0. 0. 0. 0. 1. 1.]
[1. 1. 0. 0. 0. 0. 1. 1.]
[1. 1. 0. 0. 0. 0. 1. 1.]]
<NDArray 6x8 @cpu(0)>
[[ 0. 2. 0. 0. 0. -2. 0.]
[ 0. 2. 0. 0. 0. -2. 0.]
[ 0. 2. 0. 0. 0. -2. 0.]
[ 0. 2. 0. 0. 0. -2. 0.]
[ 0. 2. 0. 0. 0. -2. 0.]
[ 0. 2. 0. 0. 0. -2. 0.]]
<NDArray 6x7 @cpu(0)>
'''水平方向的边缘检测
X=nd.ones((6,8))
X[2:4,:]=0
K=nd.array([[2],[-2]])
Y=corr2d(X,K)
print(X,Y)
'''
[[1. 1. 1. 1. 1. 1. 1. 1.]
[1. 1. 1. 1. 1. 1. 1. 1.]
[0. 0. 0. 0. 0. 0. 0. 0.]
[0. 0. 0. 0. 0. 0. 0. 0.]
[1. 1. 1. 1. 1. 1. 1. 1.]
[1. 1. 1. 1. 1. 1. 1. 1.]]
<NDArray 6x8 @cpu(0)>
[[ 0. 0. 0. 0. 0. 0. 0. 0.]
[ 2. 2. 2. 2. 2. 2. 2. 2.]
[ 0. 0. 0. 0. 0. 0. 0. 0.]
[-2. -2. -2. -2. -2. -2. -2. -2.]
[ 0. 0. 0. 0. 0. 0. 0. 0.]]
<NDArray 5x8 @cpu(0)>
<NDArray 5x8 @cpu(0)>
'''对角线的边缘检测
X=nd.eye(5)
K=nd.array([[2,-2],[2,-2]])
Y=corr2d(X,K)
print(X,Y)
'''
[[1. 0. 0. 0. 0.]
[0. 1. 0. 0. 0.]
[0. 0. 1. 0. 0.]
[0. 0. 0. 1. 0.]
[0. 0. 0. 0. 1.]]
<NDArray 5x5 @cpu(0)>
[[ 0. 2. 0. 0.]
[-2. 0. 2. 0.]
[ 0. -2. 0. 2.]
[ 0. 0. -2. 0.]]
<NDArray 4x4 @cpu(0)>
'''我们使用框架自带的卷积层来验证下这个权重参数的结果:
conv2d=nn.Conv2D(1,kernel_size=(1,2))
conv2d.initialize()
X=X.reshape((1,1,6,8))#批量样本数、通道数、高、宽
Y=Y.reshape((1,1,6,7))
for i in range(10):
with autograd.record():
Y_hat=conv2d(X)
l=(Y_hat-Y)**2#平方误差
l.backward()
conv2d.weight.data()[:]-=3e-2 * conv2d.weight.grad()
if (i+1)%2==0:
print('batch %d,loss %.3f'% (i+1,l.sum().asscalar()))
print(conv2d.weight.data().reshape((1,2)))
'''
batch 2,loss 20.054
batch 4,loss 3.374
batch 6,loss 0.570
batch 8,loss 0.097
batch 10,loss 0.017
[[ 1.9801984 -1.9732728]]
<NDArray 1x2 @cpu(0)>
'''
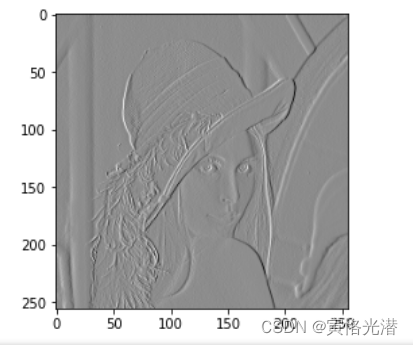
可以看到跟[[2,-2]]是非常接近的。#使用lena图片来简单测试下:
from matplotlib.image import imread
import matplotlib.pyplot as plt
img=imread('lena.png')#256*256像素
X=nd.array(img)
K=nd.array([[1,-1]])
Y=corr2d(X,K)
plt.imshow(Y.asnumpy(),cmap=plt.cm.gray_r)
#这都可以检测到边缘,有点不可思议
自定义一个卷积层
使用前面的方法,继承Block,更多详情可以参看:MXNet自定义层(模型可携带参数)
class MyConv2D(nn.Block):
def __init__(self,kernel_size,**kwargs):
super(MyConv2D,self).__init__(**kwargs)
self.weight=self.params.get('weight',shape=kernel_size)
self.bias=self.params.get('bias',shape=(1,))
def forward(self,x):
return corr2d(x,self.weight.data())+self.bias.data()
conv2d=MyConv2D(kernel_size=(1,2))不过使用corr2d这种方法会失败,不能反向传播求导,形状的原因,使用nd.Convolution,大家看它的定义其实可以发现,1D2D3D都有定义,1D少了height高度,3D多了depth深度,常用的是2D矩阵形式,修改如下:
class MyConv2D(nn.Block):
def __init__(self,kernel_size,**kwargs):
super(MyConv2D,self).__init__(**kwargs)
self.weight=self.params.get('weight',shape=kernel_size)
self.bias=self.params.get('bias',shape=(1,))
def forward(self,x):
'''
- **data**: *(batch_size, channel, height, width)*
- **weight**: *(num_filter, channel, kernel[0], kernel[1])*
- **bias**: *(num_filter,)*
- **out**: *(batch_size, num_filter, out_height, out_width)*.
'''
x=x.reshape((1,1,)+x.shape)
w=self.weight.data()
w=w.reshape((1,1,)+w.shape)
return nd.Convolution(data=x,weight=w,bias=self.bias.data(),kernel=self.weight.shape,num_filter=1)
X=nd.ones((6,8))
X[:,2:6]=0
K=nd.array([[1,-1]])
Y=corr2d(X,K)
conv2d=MyConv2D(kernel_size=(1,2))
conv2d.initialize()
for i in range(10):
with autograd.record():
Y_hat=conv2d(X)
l=(Y_hat-Y)**2#平方误差
l.backward()
conv2d.weight.data()[:]-=3e-2 * conv2d.weight.grad()
if (i+1)%2==0:
print('batch %d,loss %.3f'% (i+1,l.sum().asscalar()))
print(conv2d.weight.data().reshape((1,2)))
'''
batch 2,loss 4.622
batch 4,loss 0.782
batch 6,loss 0.137
batch 8,loss 0.029
batch 10,loss 0.011
[[ 0.9776625 -0.9999956]]
<NDArray 1x2 @cpu(0)>
'''感受野(Receptive Field)
感受野是特征图上的一点映射到原始图像受影响的区域大小,换句话来说就是,输出的某点,一直回溯到输入,有多少个影响点。
画张图来更直观的了解下,也可以看出随着层的加深,感受野在加大(甚至可能大于输入的实际大小)
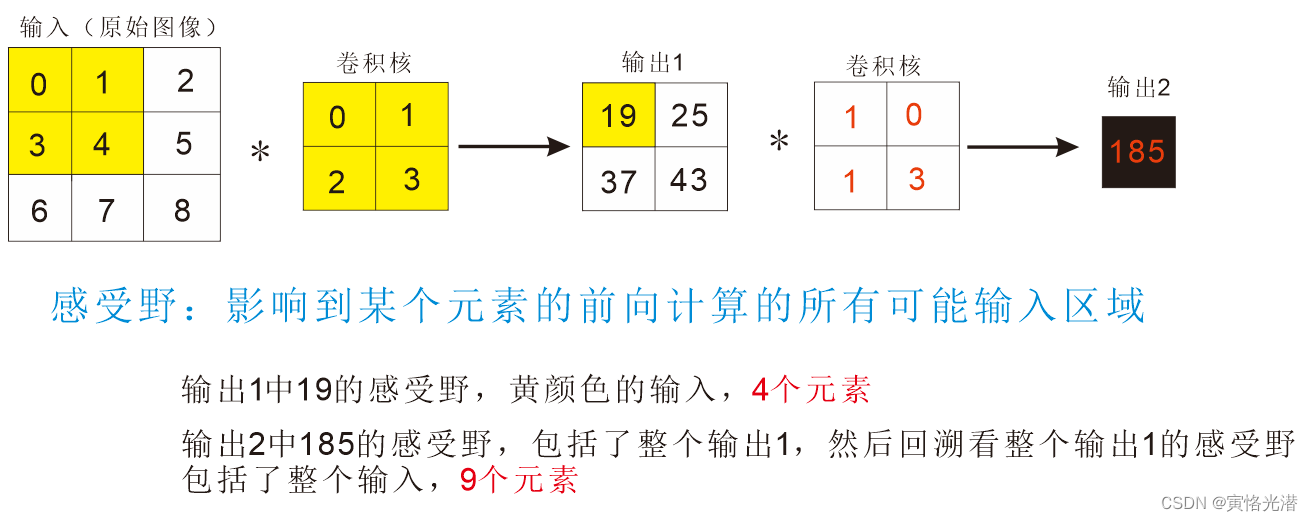
X=nd.arange(9).reshape(3,3)
K=nd.arange(4).reshape(2,2)
print(corr2d(X,K))
K1=nd.array([[1,0],[1,3]])
print(corr2d(corr2d(X,K),K1))
'''
[[19. 25.]
[37. 43.]]
<NDArray 2x2 @cpu(0)>
[[185.]]
<NDArray 1x1 @cpu(0)>
'''
技术共进,成长同行——讯飞AI开发者社区
更多推荐

 0
0 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)