
嵌入式系统开发实战:学习uC/OS与ucGUI
本文还有配套的精品资源,点击获取简介:uC/OS是一个高效的实时操作系统,适用于资源有限的嵌入式系统,如微控制器。它拥有任务调度、时间管理、内存管理等功能,保证了任务的及时响应。ucGUI是为嵌入式设备设计的图形用户界面库,它支持多种显示驱动,具有低资源占用的特点,适合资源有限的微控制器环境。本课程旨在帮助开发者理解RTOS基础、uc/OS II结构、信号量与同步机制、消...

简介:uC/OS是一个高效的实时操作系统,适用于资源有限的嵌入式系统,如微控制器。它拥有任务调度、时间管理、内存管理等功能,保证了任务的及时响应。ucGUI是为嵌入式设备设计的图形用户界面库,它支持多种显示驱动,具有低资源占用的特点,适合资源有限的微控制器环境。本课程旨在帮助开发者理解RTOS基础、uc/OS II结构、信号量与同步机制、消息队列、ucGUI原理等关键知识,并通过实践,学会如何构建一个完整的嵌入式GUI应用,优化嵌入式设备的性能。 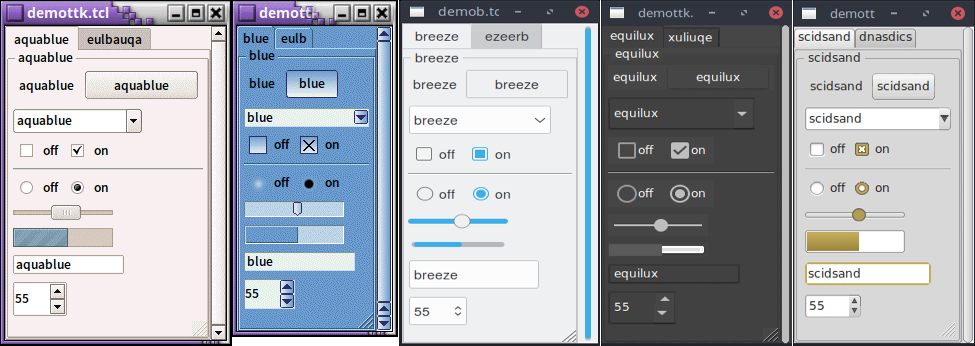
1. uC/OS实时操作系统学习
简介
实时操作系统(RTOS)是专为满足实时性要求而设计的操作系统,它能够在指定或确定的时间内完成特定的任务。uC/OS是一种广泛使用的RTOS,以其开放源代码和高度可配置性而闻名。在本章中,我们将介绍uC/OS的基本概念,并开始深入探讨任务管理。
1.1 uC/OS的特性
uC/OS具有许多特性,使其适用于多种实时应用,包括: - 多任务处理 :支持同时运行多个任务。 - 抢占式调度 :优先级高的任务可以抢占低优先级任务的执行。 - 时间确定性 :系统行为可预测,满足实时性需求。 - 内存占用小 :特别优化,适合资源受限的嵌入式系统。
1.2 uC/OS的工作原理
uC/OS通过一系列内核服务来管理任务和系统资源。核心是一个实时内核,它负责任务切换、时间管理和同步机制。任务切换是RTOS的核心功能,它涉及到保存和恢复任务的上下文环境,确保任务能够在被中断的地方继续执行。
// 伪代码示例:任务切换过程
void context_switch() {
save_current_task_context(); // 保存当前任务上下文
find_next_task(); // 寻找下一个要运行的任务
restore_next_task_context(); // 恢复下一个任务上下文
}
以上伪代码展示了任务切换的基本步骤:保存当前任务的状态,找到下一个任务,并恢复下一个任务的状态。这一过程对于RTOS的实时性能至关重要。
2. 任务管理、时间管理和内存管理
在第一章中,我们介绍了uC/OS实时操作系统的基本概念和特点。本章节我们将深入探讨uC/OS中的任务管理、时间管理和内存管理机制,这些是实时操作系统的核心功能,对于构建稳定可靠的嵌入式系统至关重要。
2.1 任务管理基础
2.1.1 任务的创建和结束
在uC/OS中,任务是执行特定功能的独立线程。任务的创建通常涉及定义任务的堆栈大小、任务函数以及任务优先级等参数。任务的创建可以通过 OSTaskCreate() 函数实现,而任务的结束则可以通过调用 OSTaskDel() 函数来实现。
// 任务创建示例代码
void Task(void *p_arg) {
// 任务体
}
int main(void) {
OS_ERR err;
OSTaskCreate((OS_TCB *)&TaskTCB,
(CPU_CHAR *"Task"),
(OS_TASK_PTR )Task,
(void *)0,
(OS_PRIO )5,
(CPU_STK *)&TaskStk[0],
(CPU_STK_SIZE)TASK_STK_SIZE,
(CPU_STK_SIZE)0,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void *)0,
(OS_OPT )(OS_OPT_TASK_STK_CHK | OS_OPT_TASK_STK_CLR),
(OS_ERR *)&err);
if (err != OS_ERR_NONE) {
// 错误处理
}
// 启动多任务调度
OSStart(&err);
return 0;
}
在上述代码中,我们定义了一个任务函数 Task ,并在 main 函数中创建了一个任务实例。任务结束的示例代码如下:
// 任务结束示例代码
void DeleteTask(void) {
OS_ERR err;
OSTaskDel(&TaskTCB, OS_OPT_NONE, &err);
if (err != OS_ERR_NONE) {
// 错误处理
}
}
在此代码段中,我们使用 OSTaskDel() 函数来结束一个任务。需要注意的是,任务结束后,相关的资源需要手动释放以避免内存泄漏。
2.1.2 任务的优先级和调度策略
uC/OS使用基于优先级的抢占式调度策略,这意味着高优先级的任务可以抢占低优先级任务的执行。任务的优先级是任务分配的重要参数,它决定了任务在系统中的执行顺序。
// 设置任务优先级
void SetPriorityTask(OS_TCB *p_tcb, OS_PRIO prio) {
p_tcb->Prio = prio;
}
在上述代码中,我们定义了一个函数 SetPriorityTask ,用于设置任务的优先级。uC/OS允许动态改变任务的优先级,这在某些实时应用中非常有用。
任务调度器根据任务的优先级和状态(挂起、就绪、运行、等待、延迟或删除)来决定哪个任务将获得CPU的控制权。
任务调度流程图
graph TD
A[任务调度器] -->|检查就绪态任务| B{是否存在就绪态任务}
B -->|是| C[获得最高优先级任务]
B -->|否| D[调度空闲任务]
C --> E[切换上下文]
D --> E
E --> F[执行任务]
在上述流程图中,任务调度器首先检查是否存在就绪态的任务,如果存在,则获取具有最高优先级的任务,否则调度空闲任务。随后,任务调度器会切换上下文并执行任务。
2.2 时间管理机制
2.2.1 定时器的使用和配置
uC/OS提供了两种定时器:一次性定时器和周期性定时器。定时器的使用需要调用 OSTmrCreate() 函数来创建定时器实例,并使用 OSTmrStart() 函数来启动定时器。
// 定时器配置示例
void ConfigureTimer(void) {
OS_ERR err;
OS_TMR tmr;
// 定时器参数设置
tmr.Type = OS_TMR_TYPEワンショット;
tmr.Dly = 5000; // 延时5000个tick
tmr.Period = 10000; // 周期10000个tick
tmr.PendOnErr = OS_TRUE;
tmr.Tmr回调函数 = TimerCallback;
tmr.Prio = 5;
OSTmrCreate(&tmr, &err);
if (err != OS_ERR_NONE) {
// 错误处理
}
// 启动定时器
OSTmrStart(&tmr, &err);
if (err != OS_ERR_NONE) {
// 错误处理
}
}
// 定时器回调函数
void TimerCallback(OS_TMR *p_tmr, void *p_arg) {
// 定时器到期时执行的操作
}
在上述代码中,我们定义了一个定时器配置函数 ConfigureTimer ,并创建了一个周期性定时器。定时器到期时,会调用回调函数 TimerCallback 。
2.2.2 时间片轮转和中断管理
时间片轮转是一种任务调度策略,它将CPU时间分配给多个任务,使得每个任务轮流执行。uC/OS通过 OSTimeTick() 函数来管理时间片轮转。
// 时间片轮转示例
void TimeSliceManagement(void) {
OS_ERR err;
while (1) {
OSTimeTick(&err);
if (err != OS_ERR_NONE) {
// 错误处理
}
// 延时
OSTimeDlyHMSM(0, 0, 1, 0, OS_OPT_TIME_DLY, &err);
if (err != OS_ERR_NONE) {
// 错误处理
}
}
}
在上述代码中,我们通过一个无限循环来模拟时间片轮转。在每次循环中,我们调用 OSTimeTick() 来管理时间,并使用 OSTimeDlyHMSM() 函数来实现延时。
中断管理是实时操作系统的关键组成部分。uC/OS提供了一个中断管理器,允许中断服务例程与任务之间进行通信。
2.2.3 中断管理示例代码
// 中断服务例程
void ISR(void *p_arg) {
OS_ERR err;
// 中断处理
OSTimeTick(&err);
if (err != OS_ERR_NONE) {
// 错误处理
}
}
// 中断管理配置
void ConfigureInterrupt(void) {
OS_ERR err;
// 注册中断服务例程
OSIntSrcReg(&ISR, &err);
if (err != OS_ERR_NONE) {
// 错误处理
}
}
在上述代码中,我们定义了一个中断服务例程 ISR ,并在 ConfigureInterrupt 函数中注册了该例程。中断服务例程中调用 OSTimeTick() 来更新系统的时钟。
2.3 内存管理策略
2.3.1 内存分区和分配方法
uC/OS提供了灵活的内存管理策略,包括静态和动态内存分配。静态内存分配在编译时分配内存,而动态内存分配则在运行时进行。
// 静态内存分配
CPU_STK TaskStk[TASK_STK_SIZE];
OS_TCB TaskTCB;
// 动态内存分配
void *p_buf;
OS_ERR err;
p_buf = OSMemGet(&mem pool, &err);
if (err != OS_ERR_NONE) {
// 错误处理
}
在上述代码中,我们展示了如何进行静态和动态内存分配。静态内存分配适用于已知大小的内存需求,而动态内存分配则适用于变化的内存需求。
2.3.2 内存池的实现和管理
内存池是一种预先分配一定大小内存块的内存管理技术。uC/OS使用 OSMemPoolCreate() 函数来创建内存池,并使用 OSMemPoolGet() 和 OSMemPoolPut() 函数来分配和释放内存块。
// 内存池配置
OS_MEM_POOL mem_pool;
void *p_mem;
OS_ERR err;
OSMemPoolCreate(&mem_pool,
"Memory Pool",
10,
1,
sizeof(CHAR),
&err);
if (err != OS_ERR_NONE) {
// 错误处理
}
// 从内存池中获取内存块
p_mem = OSMemPoolGet(&mem_pool, OS_OPT_CREATE_NONE, OS_OPT_TIME_DLY, &err);
if (err != OS_ERR_NONE) {
// 错误处理
}
// 释放内存块
OSMemPoolPut(&mem_pool, p_mem, OS_OPT_NONE, &err);
if (err != OS_ERR_NONE) {
// 错误处理
}
在上述代码中,我们定义了一个内存池配置函数,并展示了如何从内存池中获取和释放内存块。
内存池使用示例表格
| 操作 | 函数 | 参数 | 返回值 | 描述 | |---|---|---|---|---| | 创建内存池 | OSMemPoolCreate | mem_pool, name, num_blocks, blk_size, mem_err | err | 创建内存池 | | 获取内存块 | OSMemPoolGet | mem_pool, p_mem, blk_size, timeout, err | err | 从内存池中获取内存块 | | 释放内存块 | OSMemPoolPut | mem_pool, p_mem, blk_size, err | err | 释放内存块 |
通过本章节的介绍,我们了解了uC/OS中任务管理、时间管理和内存管理的基本概念和使用方法。这些是构建实时系统的基础,对于理解系统的行为和性能至关重要。在下一章中,我们将继续深入探讨信号量与同步机制,这是实现任务间通信和协调的关键技术。
3. 信号量与同步机制
3.1 信号量的基本概念
3.1.1 信号量的创建和使用
在实时操作系统中,信号量是一种非常重要的同步机制,用于解决多个任务间对共享资源访问的互斥问题。信号量可以用来实现任务间的同步,也可以用于任务间的通信。在uC/OS中,信号量通常有两种类型:二进制信号量和计数信号量。
首先,我们来了解如何在uC/OS中创建和使用信号量。创建信号量时,需要调用 OSSemCreate() 函数,该函数的原型如下:
INT16U OSSemCreate(INT16U cnt, INT16U *sem);
其中, cnt 是信号量的初始计数值, sem 是信号量句柄的指针。函数成功创建信号量后返回一个非零值,否则返回0。
使用信号量时,可以调用 OSSemPend() 函数来请求信号量,原型如下:
INT8U OSSemPend(INT16U sem, INT16U timeout, INT16U *perr);
该函数将等待信号量, timeout 参数用于设置等待超时时间。如果在指定时间内信号量被释放,则返回值为OS_NO_ERR,否则返回OS_TIMEOUT或其它错误码。
3.1.2 信号量与互斥锁的区别
信号量和互斥锁都是用于同步和互斥的机制,但它们之间存在一些重要的区别。互斥锁通常用于对共享资源的独占访问控制,而信号量更适用于资源的计数和同步。
互斥锁(Mutex):
- 一次只允许一个任务访问资源。
- 用于保护临界区,确保同一时间只有一个任务可以执行该区段的代码。
- 优先级反转问题。
信号量:
- 可以允许多个任务访问同一资源,但必须确保资源的正确计数。
- 用于同步多个任务的执行顺序或资源的使用情况。
- 不存在优先级反转的问题。
3.2 同步机制的应用
3.2.1 互斥锁的配置和使用
互斥锁(Mutex)是另一种常用的同步机制,它用于防止多个任务同时访问同一资源,从而避免竞态条件的发生。在uC/OS中,互斥锁的创建和使用与信号量类似,但功能有所不同。
互斥锁的创建函数为 OSMutexCreate() :
INT8U OSMutexCreate(INT16U mutex, INT8U *perr);
请求互斥锁使用 OSMutexPend() 函数:
INT8U OSMutexPend(INT16U mutex, INT16U timeout, INT8U *perr);
释放互斥锁使用 OSMutexPost() 函数:
INT8U OSMutexPost(INT16U mutex, INT8U *perr);
3.2.2 事件标志组的实现
事件标志组是一种同步机制,用于表示和等待一组事件的发生。每个事件标志组由一个或多个标志位组成,任务可以通过这些标志位来实现复杂的同步和通信。
在uC/OS中,事件标志组的创建使用 OSFlagCreate() 函数:
INT16U OSFlagCreate(INT16U *flag, INT16U *perr);
等待事件标志组使用 OSFlagPend() 函数:
INT16U OSFlagPend(INT16U *flag, INT16U flags, INT16U mode, INT16U timeout, INT16U *perr);
3.2.3 消息邮箱的同步方式
消息邮箱是另一种同步机制,用于在任务间传递消息。每个消息邮箱可以存储一个指向消息的指针或NULL,表示邮箱为空。
创建消息邮箱使用 OSMboxCreate() 函数:
void *OSMboxCreate(void *msg);
发送消息到邮箱使用 OSMboxPost() 函数:
INT8U OSMboxPost(void *mbox, void *msg, INT8U *perr);
从邮箱接收消息使用 OSMboxPend() 函数:
void *OSMboxPend(void *mbox, INT8U timeout, INT8U *perr);
通过本章节的介绍,我们了解了信号量和同步机制的基本概念、创建和使用方法,以及互斥锁、事件标志组和消息邮箱的实现方式。这些机制在实时操作系统中扮演着至关重要的角色,能够帮助开发者构建稳定、高效的嵌入式系统。在本章节中,我们详细探讨了信号量与互斥锁的区别,以及如何在实际项目中应用这些同步工具。总结起来,正确理解和应用信号量、互斥锁、事件标志组和消息邮箱,对于构建可靠的多任务系统至关重要。
总结
在本章节中,我们详细探讨了信号量与互斥锁的区别,以及如何在实际项目中应用这些同步工具。总结起来,正确理解和应用信号量、互斥锁、事件标志组和消息邮箱,对于构建可靠的多任务系统至关重要。小结信号量和同步机制是实时操作系统中的核心概念,它们的正确使用是保证系统稳定运行的关键。通过本章节的学习,我们应该能够熟练掌握这些同步机制,并在未来的项目中灵活运用。
4. 消息队列
4.1 消息队列的基本原理
4.1.1 消息队列的定义和特性
消息队列是一种允许任务之间通过发送和接收消息来进行数据交换的通信机制。在实时操作系统(RTOS)中,消息队列是一种重要的同步和通信手段,它提供了一种灵活的方式来实现任务间的数据传递和事件通知。
消息队列具有以下特性:
- 异步通信 :发送者不需要等待接收者处理消息,即可继续执行后续代码。
- 缓冲区管理 :消息队列可以自动管理消息的存储,无需发送者和接收者关心消息存储的具体细节。
- 优先级排队 :消息可以具有优先级,系统根据优先级顺序处理消息。
- 阻塞和非阻塞操作 :任务在发送或接收消息时,如果不满足条件,可以选择阻塞等待或非阻塞返回。
4.1.2 消息的发送和接收
消息发送通常涉及将一个数据结构(消息体)放入队列,而消息接收则是从队列中取出这个数据结构的过程。消息队列的发送和接收操作可以是非阻塞的,也可以是阻塞的。
非阻塞操作允许任务在消息队列满或者没有消息可用时立即返回,而阻塞操作则会使任务挂起直到满足条件为止。
以下是一个简单的消息队列发送和接收操作的示例代码,使用伪代码表示:
// 伪代码:消息队列的创建和初始化
MessageQueue mq = create_message_queue(QUEUE_SIZE);
// 伪代码:发送消息
function sendMessage(mq, message) {
if (is_queue_full(mq)) {
if (is_non_blocking) {
return ERROR;
} else {
block_task_until_queue_has_space(mq);
}
}
add_message_to_queue(mq, message);
}
// 伪代码:接收消息
function receiveMessage(mq) {
if (is_queue_empty(mq)) {
if (is_non_blocking) {
return ERROR;
} else {
block_task_until_message_is_available(mq);
}
}
message = remove_message_from_queue(mq);
return message;
}
在上述伪代码中, create_message_queue 创建并初始化消息队列, sendMessage 和 receiveMessage 分别实现了消息的发送和接收。 is_queue_full , is_queue_empty , is_non_blocking , block_task_until_queue_has_space , block_task_until_message_is_available , add_message_to_queue 和 remove_message_from_queue 是一些抽象的操作,具体实现依赖于不同的操作系统。
4.2 消息队列的高级应用
4.2.1 消息队列与任务通信
消息队列可以用来实现任务之间的通信,特别是在任务需要异步处理时。例如,一个任务可能生成数据,而另一个任务需要处理这些数据。在这种情况下,生成数据的任务可以将数据作为消息发送到队列中,而处理数据的任务可以从队列中接收消息并进行处理。
4.2.2 消息队列的同步和异步处理
消息队列不仅可以用于任务间的通信,还可以用于同步和异步处理。同步处理意味着任务在执行某些操作之前需要等待消息的到来,而异步处理则允许任务在接收到消息之前继续执行其他操作。
例如,假设有一个任务负责读取传感器数据,并将数据放入消息队列中。另一个任务需要使用这些数据进行计算。第二个任务可以设置为同步模式,等待并接收第一个任务发送的数据,或者设置为异步模式,在接收到数据之前继续执行其他任务。
4.2.3 消息队列的性能优化
消息队列的性能优化通常涉及减少消息的拷贝次数、使用适当的消息大小、以及避免不必要的阻塞。在设计系统时,应考虑以下几点:
- 消息大小 :应尽可能小以减少内存占用和拷贝时间。
- 内存分配策略 :使用固定大小的消息缓冲区可以减少内存分配和释放的开销。
- 优先级处理 :使用优先级队列可以确保高优先级的消息得到及时处理。
- 队列容量 :确保队列容量足够大,以避免频繁的阻塞和解除阻塞操作。
以下是一个简单的性能优化示例,展示了如何使用固定大小的消息缓冲区来提高性能:
// 伪代码:固定大小消息缓冲区的发送操作
MessageBuffer buffers[NUMBER_OF_BUFFERS];
uint8_t current_index = 0;
function sendMessage(mq, data) {
if (is_queue_full(mq)) {
if (is_non_blocking) {
return ERROR;
} else {
block_task_until_queue_has_space(mq);
}
}
buffers[current_index] = data;
add_message_to_queue(mq, &buffers[current_index]);
current_index = (current_index + 1) % NUMBER_OF_BUFFERS;
}
// 伪代码:固定大小消息缓冲区的接收操作
function receiveMessage(mq) {
MessageBuffer *message;
if (is_queue_empty(mq)) {
if (is_non_blocking) {
return ERROR;
} else {
block_task_until_message_is_available(mq);
}
}
message = remove_message_from_queue(mq);
return *message;
}
在这个示例中, buffers 是一个固定大小的缓冲区数组, current_index 用于循环使用这些缓冲区。这种方式可以减少动态内存分配的开销,并且可以提高消息发送和接收的速度。
4.2.4 消息队列的设计和使用模式
在设计消息队列时,需要考虑以下几点:
- 队列设计 :确定消息队列的大小和数量,以及是否需要支持优先级。
- 同步机制 :选择适当的同步机制,例如使用信号量、互斥锁等。
- 错误处理 :实现错误处理机制,确保系统在遇到错误时能够正确响应。
消息队列的使用模式主要有以下几种:
- 单消费者模式 :一个消息队列只有一个消费者任务。
- 多消费者模式 :一个消息队列有多个消费者任务,需要考虑消息的分发策略。
- 发布/订阅模式 :发布者发送消息到队列,多个订阅者接收消息。
4.2.5 消息队列的应用案例分析
为了更好地理解消息队列的应用,我们来看一个简单的应用案例:
案例:智能家居控制系统
在一个智能家居控制系统中,消息队列可以用来实现不同模块之间的通信。例如,温度传感器模块可以将采集到的温度数据发送到消息队列中,而控制模块可以从队列中读取温度数据,并根据设定的温度范围调整空调的工作状态。
在这个案例中,消息队列的使用可以带来以下好处:
- 模块化设计 :不同的模块可以独立工作,只通过消息队列交换数据。
- 灵活性 :可以轻松添加或移除模块,不会影响其他模块的运行。
- 可扩展性 :系统可以根据需要增加更多的传感器或控制模块。
4.2.6 消息队列的设计和使用模式
在设计消息队列时,需要考虑以下几点:
- 队列设计 :确定消息队列的大小和数量,以及是否需要支持优先级。
- 同步机制 :选择适当的同步机制,例如使用信号量、互斥锁等。
- 错误处理 :实现错误处理机制,确保系统在遇到错误时能够正确响应。
消息队列的使用模式主要有以下几种:
- 单消费者模式 :一个消息队列只有一个消费者任务。
- 多消费者模式 :一个消息队列有多个消费者任务,需要考虑消息的分发策略。
- 发布/订阅模式 :发布者发送消息到队列,多个订阅者接收消息。
4.2.7 消息队列的性能调优
消息队列的性能调优可以涉及多个方面,包括但不限于:
- 队列大小 :根据系统的需求调整队列的大小,以减少内存占用和提高效率。
- 消息大小 :减少消息的大小,以减少内存拷贝的开销。
- 优先级设置 :合理设置消息的优先级,确保高优先级的消息能够及时处理。
- 任务优先级 :合理设置任务的优先级,确保关键任务能够及时响应消息。
以下是一个简单的性能调优示例,展示了如何调整队列大小和消息大小来提高性能:
// 伪代码:调整消息队列的大小
MessageQueue mq = create_message_queue(NEW_QUEUE_SIZE);
// 伪代码:调整发送消息的大小
function sendMessage(mq, data) {
if (is_queue_full(mq)) {
if (is_non_blocking) {
return ERROR;
} else {
block_task_until_queue_has_space(mq);
}
}
add_message_to_queue(mq, data);
}
// 伪代码:调整接收消息的大小
function receiveMessage(mq) {
if (is_queue_empty(mq)) {
if (is_non_blocking) {
return ERROR;
} else {
block_task_until_message_is_available(mq);
}
}
MessageBuffer message;
message = remove_message_from_queue(mq);
return message;
}
在这个示例中, NEW_QUEUE_SIZE 是调整后的队列大小。通过调整队列大小和消息大小,可以减少内存拷贝的开销,提高消息队列的处理速度。
通过本章节的介绍,我们可以看到消息队列在RTOS中的重要性及其在实际应用中的广泛性。消息队列不仅可以用于任务间的数据交换,还可以用于同步、异步处理和性能优化。在设计和使用消息队列时,需要综合考虑多种因素,以确保系统的高效运行。
5. ucGUI图形用户界面学习
5.1 ucGUI基础知识
5.1.1 ucGUI的架构和组件
在本章节中,我们将深入了解ucGUI的基础知识,包括其架构和核心组件。ucGUI(micro通用图形库)是一款为嵌入式系统设计的图形库,它提供了丰富的图形界面支持,使得开发者能够轻松创建美观且功能强大的用户界面。
ucGUI架构由以下几个主要组件构成:
- 图形引擎(Graphic Engine) :负责处理所有与图形显示相关的操作,如绘图、文本显示等。
- 窗口管理器(Window Manager) :管理窗口的创建、销毁和消息传递,支持多窗口管理。
- 控件(Controls) :预定义的一组图形用户界面元素,如按钮、滑块等,用于构建用户交互界面。
- 字体管理器(Font Manager) :负责字体的存储和渲染,支持多种字体格式。
- 图像管理器(Image Manager) :用于管理图像和位图的存储和显示。
这些组件协同工作,提供了完整的图形界面支持,使得开发者可以专注于业务逻辑的实现,而不是底层图形处理的复杂性。
5.1.2 ucGUI的安装和配置
在本章节介绍的第二部分,我们将探讨如何安装和配置ucGUI。安装ucGUI通常涉及以下步骤:
- 下载ucGUI源码 :从官方GitHub仓库或其他渠道获取ucGUI的源代码。
- 集成到项目中 :将ucGUI源码集成到您的嵌入式项目中,确保项目结构和编译器设置正确。
- 配置GUIConf.h :修改
GUIConf.h文件中的配置选项,以适配您的硬件和需求。这包括选择显示驱动、触摸屏驱动等。 - 编写启动代码 :编写必要的启动代码,初始化LCD、触摸屏等硬件,并调用ucGUI的初始化函数。
- 编译和调试 :编译整个项目,并进行调试,确保图形界面显示正确。
下面是一个简化的代码示例,展示了如何初始化ucGUI:
#include "GUI.h"
int main(void)
{
// 初始化硬件,如LCD、触摸屏等
LCD_Init();
TS_Init();
// 初始化ucGUI
GUI_Init();
// 创建一个窗口
WM_CreateWindow(0, 0, LCD_GetXSize(), LCD_GetYSize(), WM_CF_HOME, 0, 0);
// 进入消息循环
while(1) {
GUI_Delay(10);
WM gestures;
WM_GetGestures(&gestures);
// 处理消息
if(gestures != WM_GESTURE_NONE) {
switch(gestures) {
case WM_GESTURE_PAN:
// 处理平移事件
break;
// 其他事件处理...
}
}
}
}
在此代码中, LCD_Init 、 TS_Init 分别用于初始化LCD和触摸屏, GUI_Init 用于初始化ucGUI, WM_CreateWindow 创建了一个根窗口,而 WM_GetGestures 用于获取手势事件。
通过本章节的介绍,您应该对ucGUI的基础知识有了基本的理解,包括其架构和组件,以及如何进行安装和配置。接下来的章节,我们将深入探讨ucGUI的图形元素处理和控件应用。
6. 嵌入式GUI应用设计
6.1 嵌入式GUI设计原则
在嵌入式系统中,用户界面(GUI)的设计是一个复杂且关键的过程,它直接影响到用户体验和系统的整体性能。设计嵌入式GUI时,需要遵循一些基本原则,确保设计既美观又高效。
6.1.1 用户界面的交互设计
用户界面的交互设计应当简洁直观,以便用户能够快速上手。以下是一些关键的交互设计原则:
- 一致性 :确保应用中所有的元素和操作都遵循一致的设计规则和用户习惯。
- 可用性 :设计应考虑用户的使用场景,提供清晰的反馈和指引。
- 简洁性 :避免不必要的元素和复杂的操作流程,减少用户的认知负担。
- 可访问性 :考虑到不同用户群体的需求,包括残障人士,确保所有人都能方便地使用GUI。
6.1.2 系统资源的优化利用
在嵌入式系统中,资源往往十分有限,因此在设计GUI时需要特别注意资源的优化利用。
- 内存优化 :合理分配内存资源,使用内存池等机制来管理内存。
- 存储优化 :精简资源文件,使用压缩技术减小存储空间占用。
- 渲染性能优化 :选择合适的渲染技术和算法,减少CPU和GPU的负载。
6.2 嵌入式GUI的实践应用
6.2.1 实际项目中的GUI设计案例
在实际项目中,GUI设计需要紧密结合具体的应用场景。例如,一个智能家居控制系统,其GUI可能需要包括房间温度、湿度显示以及灯光控制等功能。设计时,我们需要考虑以下方面:
- 布局设计 :根据功能重要性合理分配屏幕空间,确保最常用功能容易访问。
- 色彩和字体 :选择适合阅读和美观的色彩搭配和字体大小。
- 图标和按钮 :设计直观易懂的图标和按钮,提供必要的视觉反馈。
6.2.2 GUI性能调优和测试
GUI的性能调优和测试是确保应用流畅运行的关键步骤。性能调优通常包括:
- 渲染性能 :优化渲染流程,减少不必要的重绘和重排操作。
- 响应时间 :确保用户操作能够得到及时响应,提高用户体验。
- 内存和CPU使用 :监控和限制资源使用,避免系统过载。
测试则包括:
- 功能测试 :确保所有GUI元素和功能按预期工作。
- 性能测试 :评估在不同条件下GUI的响应时间和稳定性。
6.3 性能优化技巧
6.3.1 常见性能瓶颈分析
在嵌入式GUI设计和开发过程中,常见的性能瓶颈可能包括:
- 高CPU占用 :由于复杂的渲染计算或动画效果导致CPU占用过高。
- 内存泄漏 :长时间运行后,内存泄漏可能会导致系统资源耗尽。
- 低帧率 :动画或视频播放时帧率不稳定,影响用户体验。
6.3.2 GUI渲染性能的提升方法
提升GUI渲染性能的方法包括:
- 使用硬件加速 :如果硬件支持,利用GPU进行渲染加速。
- 减少重绘和重排 :通过优化代码逻辑,减少不必要的屏幕刷新。
- 异步渲染 :将耗时的渲染操作放在后台线程执行,避免阻塞主线程。
// 示例代码:使用后台线程进行异步渲染
void render_async(char* data, size_t size) {
// 在后台线程中进行数据处理和渲染
process_data(data, size);
render_data();
}
以上代码展示了一个简单的异步渲染逻辑,其中 process_data 和 render_data 函数分别用于处理数据和进行渲染。这种方式可以减少主线程的负载,提升GUI的整体性能。
简介:uC/OS是一个高效的实时操作系统,适用于资源有限的嵌入式系统,如微控制器。它拥有任务调度、时间管理、内存管理等功能,保证了任务的及时响应。ucGUI是为嵌入式设备设计的图形用户界面库,它支持多种显示驱动,具有低资源占用的特点,适合资源有限的微控制器环境。本课程旨在帮助开发者理解RTOS基础、uc/OS II结构、信号量与同步机制、消息队列、ucGUI原理等关键知识,并通过实践,学会如何构建一个完整的嵌入式GUI应用,优化嵌入式设备的性能。

技术共进,成长同行——讯飞AI开发者社区
更多推荐

 26
26 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)