
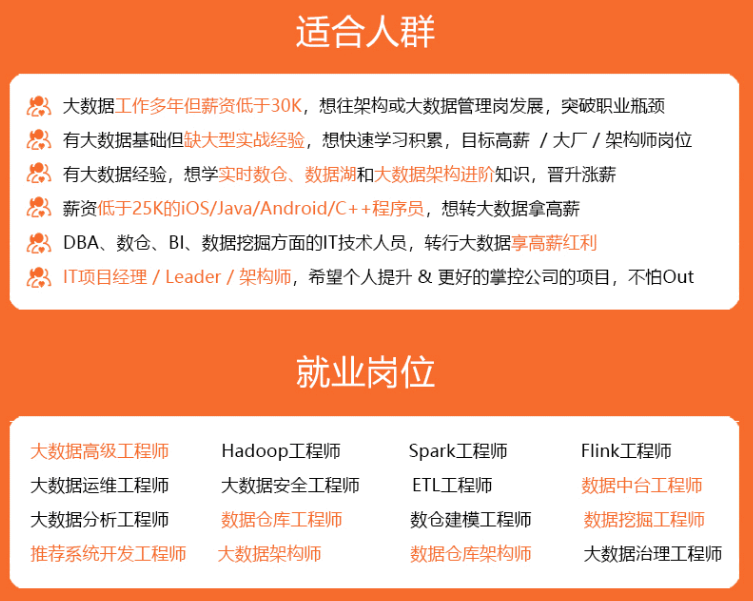
2024年大数据最全PyTorch ResNet 实现图片分类_return torch(3),2024年最新大数据开发自学
batch_size = 1024# 一次训练的样本数目learning_rate = 0.0001# 学习率iteration_num = 20# 迭代次数optimizer = torch.optim.Adam(network.parameters(), lr=learning_rate)# 优化器batch_size = 1024# 一次训练的样本数目learning_rate = 0.00
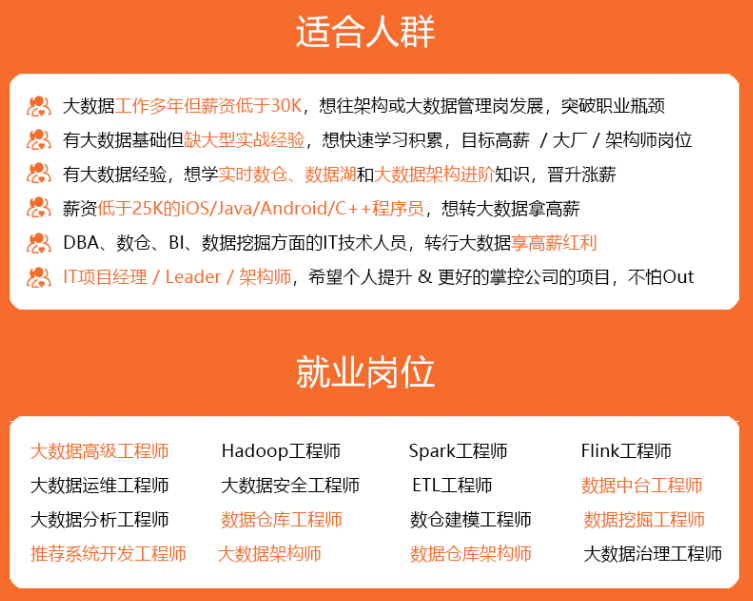
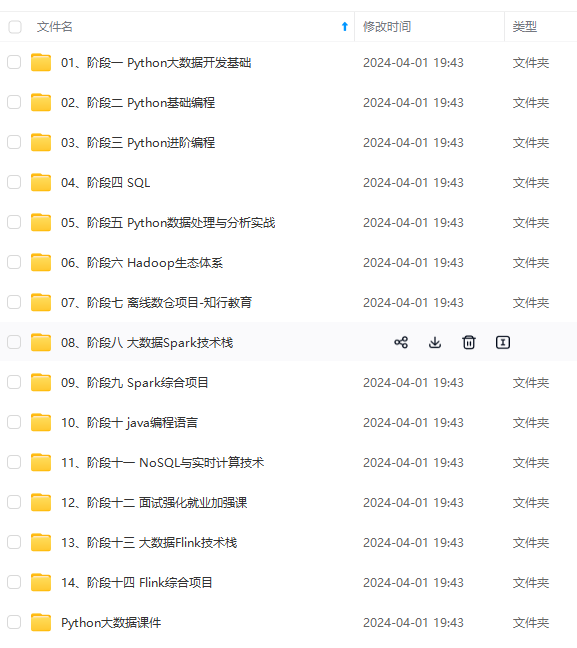
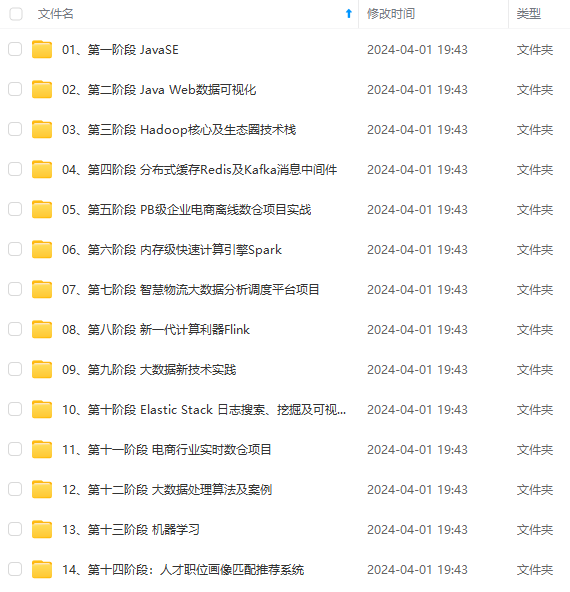
既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上大数据知识点,真正体系化!
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新
else:
self.downsample = lambda x: x # 返回x
def forward(self, input):
"""前向传播"""
out = self.conv1(input)
out = self.bn1(out)
out = F.relu(out)
out = self.conv2(out)
out = self.bn2(out)
identity = self.downsample(input)
output = torch.add(out, identity)
output = F.relu(output)
return output
ResNet_18 = torch.nn.Sequential(
# 初始层
torch.nn.Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1)), # 卷积
torch.nn.BatchNorm2d(64),
torch.nn.ReLU(),
torch.nn.MaxPool2d((2, 2)), # 池化
# 8个block(每个为两层)
BasicBlock(64, 64, stride=1),
BasicBlock(64, 64, stride=1),
BasicBlock(64, 128, stride=2),
BasicBlock(128, 128, stride=1),
BasicBlock(128, 256, stride=2),
BasicBlock(256, 256, stride=1),
BasicBlock(256, 512, stride=2),
BasicBlock(512, 512, stride=1),
torch.nn.AvgPool2d(2), # 池化
torch.nn.Flatten(), # 平铺层
# 全连接层
torch.nn.Linear(512, 100) # 100类
)
### 超参数
定义超参数
batch_size = 1024 # 一次训练的样本数目
learning_rate = 0.0001 # 学习率
iteration_num = 20 # 迭代次数
network = ResNet_18
optimizer = torch.optim.Adam(network.parameters(), lr=learning_rate) # 优化器
GPU 加速
use_cuda = torch.cuda.is_available()
if use_cuda:
network.cuda()
print(“是否使用 GPU 加速:”, use_cuda)
print(summary(network, (3, 32, 32)))
### ResNet 18 网络
ResNet_18 = torch.nn.Sequential(
# 初始层
torch.nn.Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1)), # 卷积
torch.nn.BatchNorm2d(64),
torch.nn.ReLU(),
torch.nn.MaxPool2d((2, 2)), # 池化
# 8个block(每个为两层)
BasicBlock(64, 64, stride=1),
BasicBlock(64, 64, stride=1),
BasicBlock(64, 128, stride=2),
BasicBlock(128, 128, stride=1),
BasicBlock(128, 256, stride=2),
BasicBlock(256, 256, stride=1),
BasicBlock(256, 512, stride=2),
BasicBlock(512, 512, stride=1),
torch.nn.AvgPool2d(2), # 池化
torch.nn.Flatten(), # 平铺层
# 全连接层
torch.nn.Linear(512, 100) # 100类
)
### 获取数据
def get_data():
“”“获取数据”“”
# 获取测试集
train = torchvision.datasets.CIFAR100(root="./data", train=True, download=True,
transform=torchvision.transforms.Compose([
torchvision.transforms.ToTensor(), # 转换成张量
torchvision.transforms.Normalize((0.1307,), (0.3081,)) # 标准化
]))
train_loader = DataLoader(train, batch_size=batch_size) # 分割测试集
# 获取测试集
test = torchvision.datasets.CIFAR100(root="./data", train=False, download=True,
transform=torchvision.transforms.Compose([
torchvision.transforms.ToTensor(), # 转换成张量
torchvision.transforms.Normalize((0.1307,), (0.3081,)) # 标准化
]))
test_loader = DataLoader(test, batch_size=batch_size) # 分割训练
# 返回分割好的训练集和测试集
return train_loader, test_loader
### 训练
def train(model, epoch, train_loader):
“”“训练”“”
# 训练模式
model.train()
# 迭代
for step, (x, y) in enumerate(train_loader):
# 加速
if use_cuda:
model = model.cuda()
x, y = x.cuda(), y.cuda()
# 梯度清零
optimizer.zero_grad()
output = model(x)
# 计算损失
loss = F.cross_entropy(output, y)
# 反向传播
loss.backward()
# 更新梯度
optimizer.step()
# 打印损失
if step % 10 == 0:
print('Epoch: {}, Step {}, Loss: {}'.format(epoch, step, loss))
### 测试
def test(model, test_loader):
“”“测试”“”
# 测试模式
model.eval()
# 存放正确个数
correct = 0
with torch.no_grad():
for x, y in test_loader:
# 加速
if use_cuda:
model = model.cuda()
x, y = x.cuda(), y.cuda()
# 获取结果
output = model(x)
# 预测结果
pred = output.argmax(dim=1, keepdim=True)
# 计算准确个数
correct += pred.eq(y.view_as(pred)).sum().item()
# 计算准确率
accuracy = correct / len(test_loader.dataset) * 100
# 输出准确
print("Test Accuracy: {}%".format(accuracy))
## 完整代码

完整代码:
import torch
import torchvision
import torch.nn.functional as F
from torch.utils.data import DataLoader
from torchsummary import summary
class BasicBlock(torch.nn.Module):
“”“残差块”“”
def __init__(self, inplanes, planes, stride=1):
"""初始化"""
super(BasicBlock, self).__init__()
self.conv1 = torch.nn.Conv2d(in_channels=inplanes, out_channels=planes, kernel_size=(3, 3),
stride=(stride, stride), padding=1) # 卷积层1
self.bn1 = torch.nn.BatchNorm2d(planes) # 标准化层1
self.conv2 = torch.nn.Conv2d(in_channels=planes, out_channels=planes, kernel_size=(3, 3), padding=1) # 卷积层2
self.bn2 = torch.nn.BatchNorm2d(planes) # 标准化层2
# 如果步长不为1, 用1*1的卷积实现下采样
if stride != 1:
self.downsample = torch.nn.Sequential(
# 下采样
torch.nn.Conv2d(in_channels=inplanes, out_channels=planes, kernel_size=(1, 1), stride=(stride, stride)))
else:
self.downsample = lambda x: x # 返回x
def forward(self, input):
"""前向传播"""
out = self.conv1(input)
out = self.bn1(out)
out = F.relu(out)
out = self.conv2(out)
out = self.bn2(out)
identity = self.downsample(input)
output = torch.add(out, identity)
output = F.relu(output)
return output
ResNet_18 = torch.nn.Sequential(
# 初始层
torch.nn.Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1)), # 卷积
torch.nn.BatchNorm2d(64),
torch.nn.ReLU(),
torch.nn.MaxPool2d((2, 2)), # 池化
# 8个block(每个为两层)
BasicBlock(64, 64, stride=1),
BasicBlock(64, 64, stride=1),
BasicBlock(64, 128, stride=2),
BasicBlock(128, 128, stride=1),
BasicBlock(128, 256, stride=2),
BasicBlock(256, 256, stride=1),
BasicBlock(256, 512, stride=2),
BasicBlock(512, 512, stride=1),
torch.nn.AvgPool2d(2), # 池化
torch.nn.Flatten(), # 平铺层
# 全连接层
torch.nn.Linear(512, 100) # 100类
)
定义超参数
batch_size = 1024 # 一次训练的样本数目
learning_rate = 0.0001 # 学习率
iteration_num = 20 # 迭代次数
network = ResNet_18
optimizer = torch.optim.Adam(network.parameters(), lr=learning_rate) # 优化器
GPU 加速
use_cuda = torch.cuda.is_available()
if use_cuda:
network.cuda()
print(“是否使用 GPU 加速:”, use_cuda)
print(summary(network, (3, 32, 32)))
def get_data():
“”“获取数据”“”
# 获取测试集
train = torchvision.datasets.CIFAR100(root="./data", train=True, download=True,
transform=torchvision.transforms.Compose([
torchvision.transforms.ToTensor(), # 转换成张量
torchvision.transforms.Normalize((0.1307,), (0.3081,)) # 标准化
]))
train_loader = DataLoader(train, batch_size=batch_size) # 分割测试集
# 获取测试集
test = torchvision.datasets.CIFAR100(root="./data", train=False, download=True,
transform=torchvision.transforms.Compose([
torchvision.transforms.ToTensor(), # 转换成张量
torchvision.transforms.Normalize((0.1307,), (0.3081,)) # 标准化
]))
test_loader = DataLoader(test, batch_size=batch_size) # 分割训练
# 返回分割好的训练集和测试集
return train_loader, test_loader
def train(model, epoch, train_loader):
“”“训练”“”
# 训练模式
model.train()
# 迭代
for step, (x, y) in enumerate(train_loader):
# 加速
if use_cuda:
model = model.cuda()
x, y = x.cuda(), y.cuda()
# 梯度清零
optimizer.zero_grad()
output = model(x)
# 计算损失
loss = F.cross_entropy(output, y)
# 反向传播
loss.backward()
# 更新梯度
optimizer.step()
# 打印损失
if step % 10 == 0:
print('Epoch: {}, Step {}, Loss: {}'.format(epoch, step, loss))
def test(model, test_loader):
“”“测试”“”
# 测试模式
model.eval()
# 存放正确个数
correct = 0
with torch.no_grad():
for x, y in test_loader:
# 加速
if use_cuda:
model = model.cuda()
x, y = x.cuda(), y.cuda()
# 获取结果
output = model(x)
# 预测结果
pred = output.argmax(dim=1, keepdim=True)
# 计算准确个数
correct += pred.eq(y.view_as(pred)).sum().item()
# 计算准确率
accuracy = correct / len(test_loader.dataset) * 100
# 输出准确
print("Test Accuracy: {}%".format(accuracy))
def main():
# 获取数据
train_loader, test_loader = get_data()
# 迭代
for epoch in range(iteration_num):
print("\n================ epoch: {} ================".format(epoch))
train(network, epoch, train_loader)
test(network, test_loader)
if name == “main”:
main()
输出结果:
是否使用 GPU 加速: True
/usr/local/lib/python3.7/dist-packages/torch/nn/functional.py:718: UserWarning: Named tensors and all their associated APIs are an experimental feature and subject to change. Please do not use them for anything important until they are released as stable. (Triggered internally at /pytorch/c10/core/TensorImpl.h:1156.)
return torch.max_pool2d(input, kernel_size, stride, padding, dilation, ceil_mode)
Layer (type) Output Shape Param #
================================================================
Conv2d-1 [-1, 64, 30, 30] 1,792
BatchNorm2d-2 [-1, 64, 30, 30] 128
ReLU-3 [-1, 64, 30, 30] 0
MaxPool2d-4 [-1, 64, 15, 15] 0
Conv2d-5 [-1, 64, 15, 15] 36,928
BatchNorm2d-6 [-1, 64, 15, 15] 128
Conv2d-7 [-1, 64, 15, 15] 36,928
BatchNorm2d-8 [-1, 64, 15, 15] 128
BasicBlock-9 [-1, 64, 15, 15] 0
Conv2d-10 [-1, 64, 15, 15] 36,928
BatchNorm2d-11 [-1, 64, 15, 15] 128
Conv2d-12 [-1, 64, 15, 15] 36,928
BatchNorm2d-13 [-1, 64, 15, 15] 128
BasicBlock-14 [-1, 64, 15, 15] 0
Conv2d-15 [-1, 128, 8, 8] 73,856
BatchNorm2d-16 [-1, 128, 8, 8] 256
Conv2d-17 [-1, 128, 8, 8] 147,584
BatchNorm2d-18 [-1, 128, 8, 8] 256
Conv2d-19 [-1, 128, 8, 8] 8,320
BasicBlock-20 [-1, 128, 8, 8] 0
Conv2d-21 [-1, 128, 8, 8] 147,584
BatchNorm2d-22 [-1, 128, 8, 8] 256
Conv2d-23 [-1, 128, 8, 8] 147,584
BatchNorm2d-24 [-1, 128, 8, 8] 256
BasicBlock-25 [-1, 128, 8, 8] 0
Conv2d-26 [-1, 256, 4, 4] 295,168
BatchNorm2d-27 [-1, 256, 4, 4] 512
Conv2d-28 [-1, 256, 4, 4] 590,080
BatchNorm2d-29 [-1, 256, 4, 4] 512
Conv2d-30 [-1, 256, 4, 4] 33,024
既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上大数据知识点,真正体系化!
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新
[-1, 256, 4, 4] 512
Conv2d-30 [-1, 256, 4, 4] 33,024
[外链图片转存中…(img-bMalF08j-1715244155924)]
[外链图片转存中…(img-skAxkOIU-1715244155924)]
[外链图片转存中…(img-yq9Bk0Rz-1715244155924)]
既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上大数据知识点,真正体系化!
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新

技术共进,成长同行——讯飞AI开发者社区
更多推荐

 4
4 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)