
跟着问题学13——RNN循环神经网络结构详解及代码实战
再来看一下序列T_seq和通道channel,RNN系列的序列T_seq是指一个连续的输入,比如一句话,一周的股票信息,而且这个序列是有时间先后顺序且互相关联的,而CNN系列的通道channel则是指不同角度的特征,比如彩色图像的RGB三色通道,过程中每个通道代表提取了每个方面的特征,不同通道之间是没有强相关性的,不过也可以进行融合。输入不是序列而输出为序列的情况怎么处理?但卷积神经网络并不能处理
1 循环神经网络的基本网络结构
循环神经网络简介
在前面学习的传统神经网络或卷积神经网络,其输入是向量或多维张量且是一次性输入到网络中的,并不考虑先后顺序。但在很多实际问题中,存在着很多序列型的数据(文本、语音,股票以及视频等)。什么是序列信息呢?通俗理解就是一段连续的信息,前后信息之间是有关系的,必须将不同时刻的信息放在一起理解。而且网络的输出也是和多个时刻的输入(甚至整个输入)都是有关系的。
但卷积神经网络并不能处理好这种关联性,不同时刻的输入之间是没有关联的,没有记忆能力,所以前面时刻的输出不能传递到后面的时刻。
因此,就有了循环神经网络(Recurrent Neural Network,RNN),其本质是:当前的输出同时依赖于当前的输入和之前的输入(可以以不同的形式记忆下来),也就意味着拥有记忆的能力。
比如:我喜欢吃X,吃是一个动词,按照语法规则,它后面接名词的概率就比较大,在预测X是什么的时候就要考虑前面的动词吃的信息,如果没考虑上下文信息而预测X是一个动词的话,动词+动词,很大概率是不符合语言逻辑的。
RNN相比卷积神经网络,为了适应能够记忆前面时序的内容,其结构有诸多变化,往往让初学者感到困惑,下面我们首先详细对比介绍一下RNN的网络结构。
前面我们讲到,神经网络的各种结构都是为了挖掘变换数据特征的,所以下面我们也将结合数据特征的维度来对比介绍一下RNN的网络结构。
传统神经网络结构
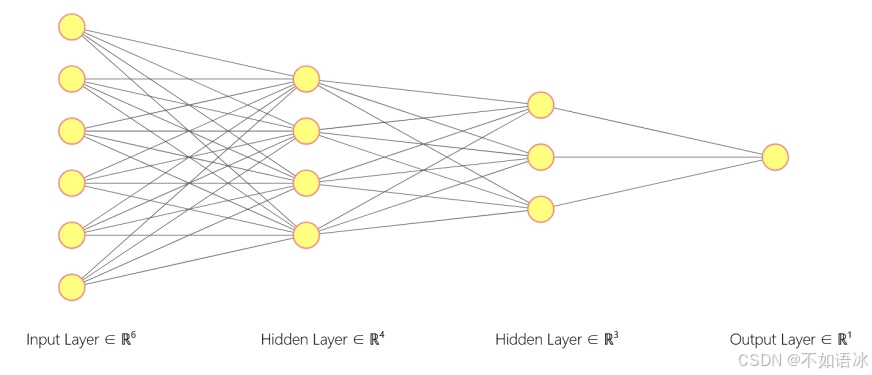
从特征角度考虑:
输入特征:是n*1的单维向量(这也是为什么卷积神经网络在linear层前要把所有特征层展平),
隐藏层:然后根据隐藏层神经元的数量m将前层输入的特征用m*1的单维向量进行表示(对特征进行了提取变换,隐藏层的数据特征),单个隐藏层的神经元数量就代表网络参数,可以设置多个隐藏层;
输出特征:最终根据输出层的神经元数量y输出y*1的单维向量。
卷积神经网络结构
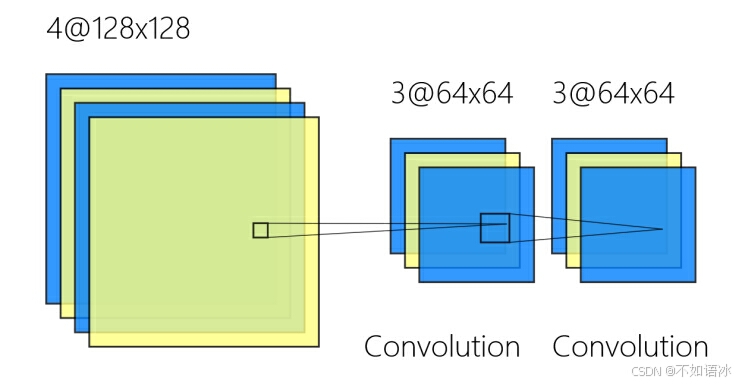
从特征角度考虑:
输入特征:是(batch)*channel*width*height的张量,
卷积层(等):然后根据输入通道channel的数量c_in和输出通道channel的数量c_out会有c_out*c_in*k*k个卷积核将前层输入的特征进行卷积(对特征进行了提取变换,k为卷积核尺寸),卷积核的大小和数量c_out*c_in*k*k就代表网络参数,可以设置多个卷积层;每一个channel都代表提取某方面的一种特征,该特征用width*height的二维张量表示,不同特征层之间是相互独立的(可以进行融合)。
输出特征:根据场景的需要设置后面的输出,可以是多分类的单维向量等等。
循环神经网络RNN结构
从特征角度考虑:
输入特征:是(batch)*T_seq*feature_size的张量(T_seq代表序列长度,注意不是batch_size).
我们来详细对比一下卷积神经网络的输入特征,
(batch)*T_seq*feature_size
(batch)*channel*width*height,
逐个进行分析,RNN系列的基础输入特征表示是feature_size*1的单维向量,比如一个单词的词向量,比如一个股票价格的影响因素向量,而CNN系列的基础输入特征是width*height的二维张量;
再来看一下序列T_seq和通道channel,RNN系列的序列T_seq是指一个连续的输入,比如一句话,一周的股票信息,而且这个序列是有时间先后顺序且互相关联的,而CNN系列的通道channel则是指不同角度的特征,比如彩色图像的RGB三色通道,过程中每个通道代表提取了每个方面的特征,不同通道之间是没有强相关性的,不过也可以进行融合。
最后就是batch,两者都有,在RNN系列,batch就是有多个句子,在CNN系列,就是有多张图片(每个图片可以有多个通道)
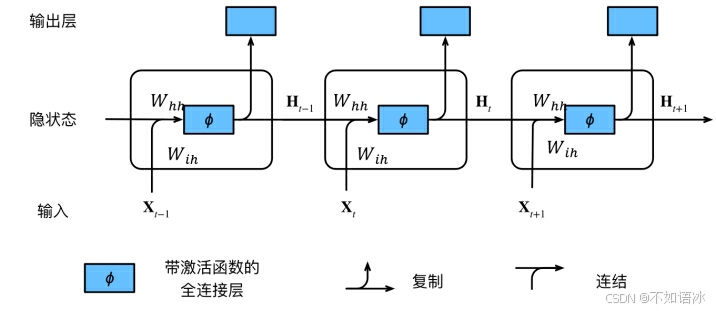
隐藏层:明确了输入特征之后,我们再来看看隐藏层代表着什么。隐藏层有T_seq个隐状态H_t(和输入序列长度相同),每个隐状态H_t类似于一个channel,对应着T_seq中的t时刻的输入特征;而每个隐状态H_t是用hidden_size*1的单维向量表示的,所以一个隐含层是T_seq*hidden_size的张量;对应时刻t的输入特征由feature_size*1变为hidden_size*1的向量。如图中所示,同一个隐含层不同时刻的参数W_ih和W_hh是共享的;隐藏层可以有num_layers个(图中只有1个)
以t时刻具体阐述一下:
X_t是t时刻的输入,是一个feature_size*1的向量
W_ih是输入层到隐藏层的权重矩阵
H_t是t时刻的隐藏层的值,是一个hidden_size*1的向量
W_hh是上一时刻的隐藏层的值传入到下一时刻的隐藏层时的权重矩阵
Ot是t时刻RNN网络的输出
从上右图中可以看出这个RNN网络在t时刻接受了输入Xt之后,隐藏层的值是St,输出的值是Ot。但是从结构图中我们可以发现St并不单单只是由Xt决定,还与t-1时刻的隐藏层的值St-1有关。
怎么理解这个参数共享呢?
虽然说X{t-1},X{t},X{t+1}是表示不同时刻的输入,但是他们输入到RNN网络中的时候并不是作为单独的向量一个一个输入地,而是组合在一起形成一个矩阵输入,然后这个矩阵再通过权重矩阵U的变化,其实是同一时刻输入地,只是计算的先后顺序不同。因此同一个隐藏层中,不同时刻的输入他们的W,V,U参数是共享地。
输出特征:最终的输出可以根据需要,保留所有隐状态或只保留最后时刻的隐状态。
RNN网络结构的数学公式
前面从概念上介绍了RNN网络结构和输入输出隐藏层,接下来具体探索一下其用数学公式的表达。
首先给定一个序列输入句子,假设这个句子有4个词语,定义为x1、x2、x3、x4,

然后我们依次看一下隐状态是如何计算的,先从h1的计算开始看:
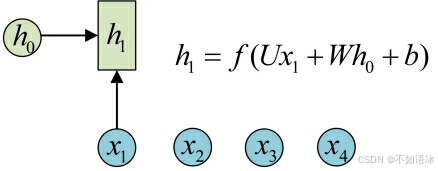
这里的h0是假设给定的先验值,也是需要训练优化的。
图示中记号的含义是:
- 圆圈或方块表示的是向量。
- 一个箭头就表示对该向量做一次变换。如上图中h0和x1分别有一个箭头连接,就表示对h0和x1各做了一次变换。
h2的计算和h1类似。要注意的是,在计算时,每一步使用的参数U、W、b都是一样的,也就是说每个步骤的参数都是共享的,这是RNN的重要特点,一定要牢记。
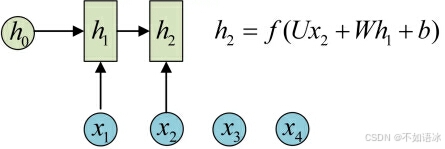
依次计算剩下来的(使用相同的参数U、W、b):
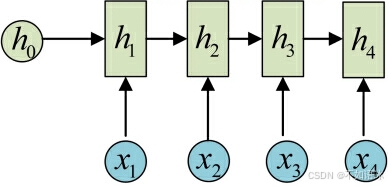
这里为了方便起见,只画出序列长度为4的情况,实际上,这个计算过程可以无限地持续下去。
然后这只是计算了一个隐藏层,事实上可以像CNN那样,继续把隐藏层的状态作为新的输入特征,继续传递到下一个隐藏层挖掘转换特征。
目前的RNN还没有输出,得到输出值的方法就是直接通过h进行计算:
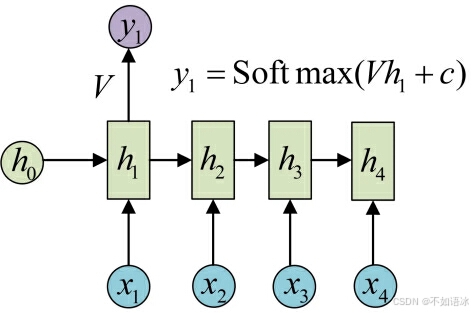
正如之前所说,一个箭头就表示对对应的向量做一次类似于f(Wx+b)的变换,这里的这个箭头就表示对h1进行一次变换,得到输出y1。
剩下的输出类似进行(使用和y1同样的参数V和c):
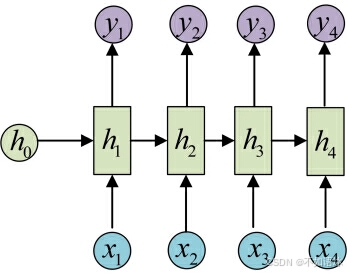
这就是最经典的RNN结构,它的输入是x1, x2, .....xn,输出为y1, y2, ...yn,也就是说,输入和输出序列必须要是等长的。
由于这个限制的存在,经典RNN的适用范围比较小,但也有一些问题适合用经典的RNN结构建模,如:
- 计算视频中每一帧的分类标签。因为要对每一帧进行计算,因此输入和输出序列等长。
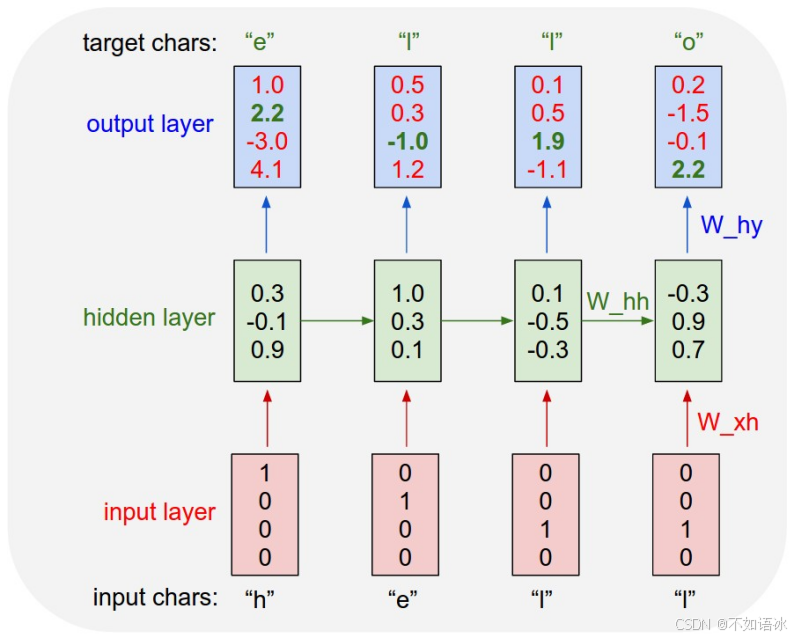
- 输入为字符,输出为下一个字符的概率。这就是著名的Char RNN
- (详细介绍请参考:The Unreasonable Effectiveness of Recurrent Neural Networks,Char RNN可以用来生成文章,诗歌,甚至是代码,非常有意思)。
2 RNN结构分类
前面在介绍RNN经典网络结构的时候,我们对比分析了输入输出的基本特征是什么样的,而且输入输出是等长的。在实际应用中,根据输入输出长度的不同,RNN又分为几种不同的形式,概括起来如下图所示:
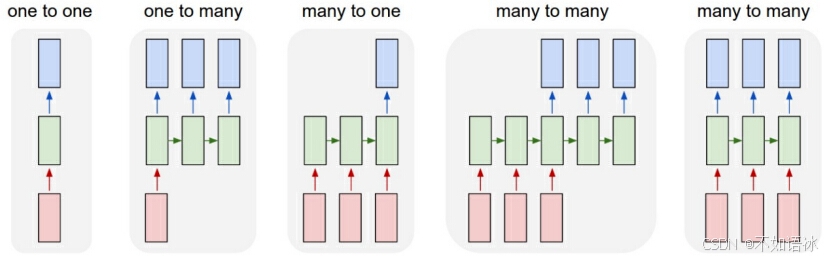
N VS 1
有的时候,我们要处理的问题输入是一个序列,输出是一个单独的值而不是序列,应该怎样建模呢?实际上,我们只在最后一个h上进行输出变换就可以了:
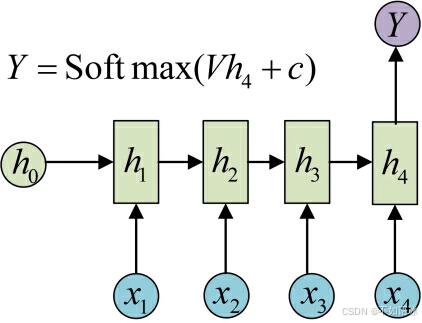
这种结构通常用来处理序列分类问题。如输入一段文字判别它所属的类别,输入一个句子判断其情感倾向,输入一段视频并判断它的类别等等。
1 VS N
输入不是序列而输出为序列的情况怎么处理?我们可以只在序列开始进行输入计算,如左图,还有一种结构是把输入信息X作为每个阶段的输入,如右图:
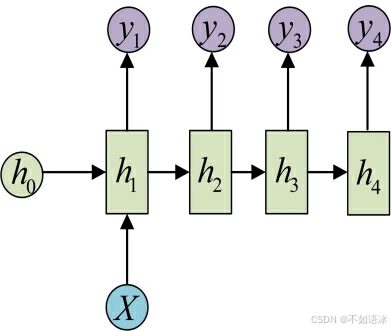
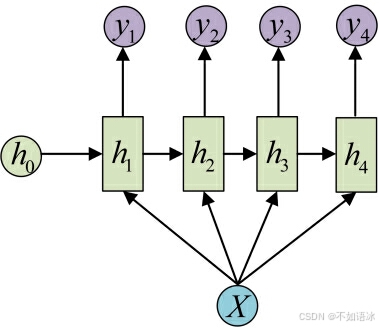
这种1 VS N的结构可以处理的问题有:
- 从图像生成文字(image caption),此时输入的X就是图像的特征,而输出的y序列就是一段句子
- 从类别生成语音或音乐等
N vs M
下面先简单介绍RNN最重要的一个变种:N vs M。这种结构又叫Encoder-Decoder模型,也可以称之为Seq2Seq模型。
经典的N vs N RNN要求序列等长,然而我们遇到的大部分问题序列都是不等长的,如机器翻译中,源语言和目标语言的句子往往并没有相同的长度。
为此,Encoder-Decoder结构先将输入数据编码成一个上下文中间向量c:
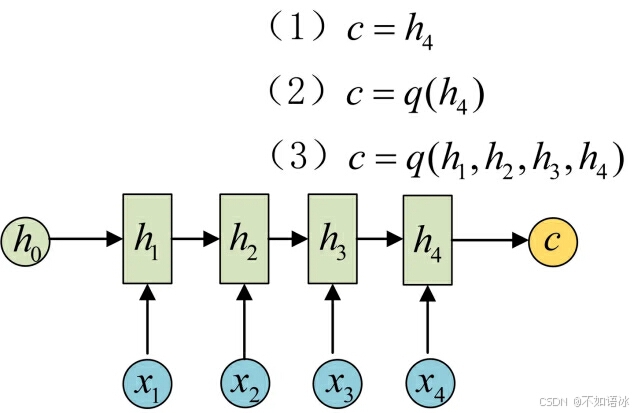
得到c有多种方式,最简单的方法就是把Encoder的最后一个隐状态赋值给c,还可以对最后的隐状态做一个变换得到c,也可以对所有的隐状态做变换。
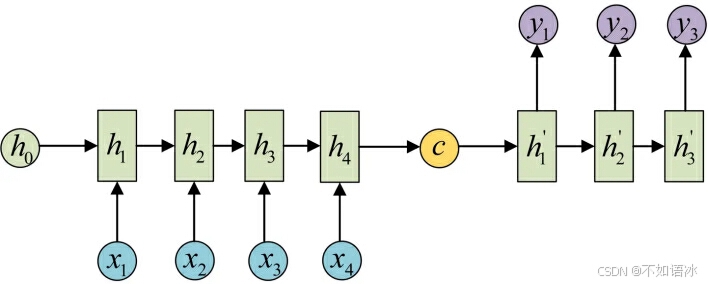
拿到c之后,就用另一个RNN网络对其进行解码,这部分RNN网络被称为Decoder。具体做法就是将c当做之前的初始状态h0输入到Decoder中:
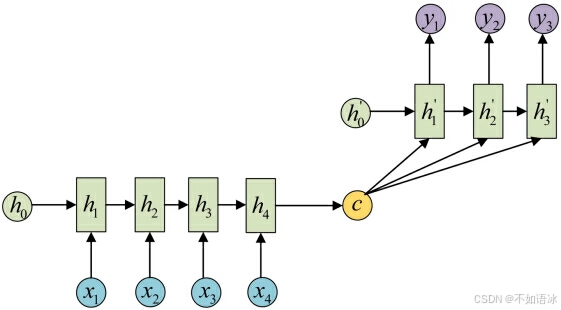
还有一种做法是将c当做每一步的输入:
由于这种Encoder-Decoder结构不限制输入和输出的序列长度,因此应用的范围非常广泛,比如:
- 机器翻译。Encoder-Decoder的最经典应用,事实上这一结构就是在机器翻译领域最先提出的
- 文本摘要。输入是一段文本序列,输出是这段文本序列的摘要序列。
- 阅读理解。将输入的文章和问题分别编码,再对其进行解码得到问题的答案。
- 语音识别。输入是语音信号序列,输出是文字序列。
- …………
3代码
模型里使用两种方法创建,一种是直接调用pytorch框架里的模型,熟悉参数及调用流程,另一种是手写了rnn函数的具体计算过程,学习内部结构是什么样的。
model.py
import torch
import torch.nn as nn
import random
#直接使用pytorch自带的RNN类
#可以看到,RNN网络也是继承自nn.Module的
class RNN(nn.Module):
#这里的输入参数包括最开始输入特征“词向量”维度,隐藏层的每个隐状态的特征维度,隐藏层数量,输出层的特征维度(一般和隐状态特征维度一致)
def __init__(self,feature_size,hidden_size,num_layers,output_size):
super(RNN,self).__init__()
self.rnn=nn.RNN(
input_size=feature_size,hidden_size=hidden_size,
num_layers=num_layers,batch_first=True
)
#参数初始化,
for k in self.rnn.parameters():
nn.init.normal_(k,mean=0.0,std=0.001)
#linear层的输入和输出的维度可以是任意的,只需要保证最后一个维度是特征维度in_features&out_features就行
# #- Input: :math:`(*, H_{in})` where :math:`*` means any number of
# dimensions including none and :math:`H_{in} = \text{in\_features}`.
# - Output: :math:`(*, H_{out})` where all but the last dimension
# are the same shape as the input and :math:`H_{out} = \text{out\_features}`.
#
# Examples::
# >> > m = nn.Linear(20, 30)
# >> > input = torch.randn(128, 20)
# >> > output = m(input)
# >> > print(output.size())
# torch.Size([128, 30])
self.linear=nn.Linear(hidden_size,output_size)
self.hidden_size=hidden_size
def forward(self,x,hidden_prev):
#每一次调用rnn层返回的就是输出层和隐状态值,隐状态又是下一循环的上一状态值,所以用hidden_prev表示
out,hidden_prev=self.rnn(x,hidden_prev)
print("out1&hidden_prev.shape",out.shape,hidden_prev.shape)
#view()相当于reshape、resize,重新调整PyTorch 中的 Tensor 形状,若非 Tensor 类型,可使用 data = torch.tensor(data)来进行转换。
# out=out.view(-1,self.hidden_size)
print("out2.shape", out.shape)
out=self.linear(out)
print("out3.shape", out.shape)
# out=out.unsqueeze(0)
print("out4.shape", out.shape)
#输出的维度是batch_size*T_seq*hidden_size
return out,hidden_prev
#自己实现一个RNN函数
#这里的函数参数需要手动给定网络结构参数,
def rnn_forward(input,weight_ih,weight_hh,bias_ih,bias_hh,h_prev):
#input的shape就是batch_size*T_seq*feature_size(设置batch_first=TRUE)
batch_size,T_seq,feature_size=input.shape
hidden_size=weight_ih.shape[0]
h_out=torch.zeros(batch_size,T_seq,hidden_size)
for t in range(T_seq):
x=input[:,t,:].unsqueeze(2)
# print("xt.shape",x.shape)
#unsqueeze,在给定维度上(从0开始)扩展1个维度,负数代表从后开始数
#具体到下面,就是先在第0维度上扩展成1*hidden_size*feature_size;
# 然后.tile就是在第0维度复制batch_size次,变成batch_size*hidden_size*feature_size
weight_ih_batch=weight_ih.unsqueeze(0).tile(batch_size,1,1)
# print("weight_ih_batch.shape", weight_ih_batch.shape)
weight_hh_batch=weight_hh.unsqueeze(0).tile(batch_size,1,1)
# print("weight_hh_batch.shape", weight_hh_batch.shape)
#计算两个tensor的矩阵乘法,torch.bmm(a,b),tensor a 的size为(b,h,w),tensor b的size为(b,w,m)
# 也就是说两个tensor的第一维是相等的,然后第一个数组的第三维和第二个数组的第二维度要求一样,其实就是第一维不变,后面二维张量相乘,h*w*w*m=h*m
# 对于剩下的则不做要求,输出维度 (b,h,m)
# weight_ih_batch=batch_size*hidden_size*feature_size
#x=batch_size*feature_size*1
#w_times_x=batch_size*hidden_size*1
##squeeze,在给定维度(维度值必须为1)上压缩维度,负数代表从后开始数
w_times_x=torch.bmm(weight_ih_batch,x).squeeze(-1)#
# print("w_times_x.shape", w_times_x.shape)
w_times_h=torch.bmm(weight_hh_batch,h_prev.unsqueeze(2)).squeeze(-1)
# print("w_times_h.shape", w_times_h.shape)
h_prev=torch.tanh(w_times_x+bias_ih+w_times_h+bias_hh)
print("h_prev.shape", h_prev.shape)
h_out[:,t,:]=h_prev
print("h_out.shape", h_out.shape)
return h_out,h_prev.unsqueeze(0)
if __name__=="__main__":
# input=torch.randn(batch_size,T_seq,feature_size)
# h_prev=torch.zeros(batch_size,hidden_size)
# rnn=nn.RNN(input_size,hidden_size,batch_first=True)
# output,state_final=rnn(input,h_prev.unsqueeze(0))
# print(output)
# print(state_final)
batch_size, T_seq =10, 30 # 批大小,输入序列长度
feature_size, hidden_size = 5, 8 #
num_layers, output_size=1,3
input = torch.randn(batch_size, T_seq, feature_size)
h_prev = torch.zeros(1,batch_size, hidden_size)#.unsqueeze(0)
# my_rnn=RNN(feature_size,hidden_size,num_layers,output_size)
rnn=nn.RNN(feature_size,hidden_size,batch_first=True)
# rnn_output, state_final = rnn(input, h_prev.unsqueeze(0))
# for k,v in rnn.named_parameters():
# print(k,v.shape)
my_rnn_output,my_state_final=rnn_forward(input,rnn.weight_ih_l0,rnn.weight_hh_l0,
rnn.bias_ih_l0,rnn.bias_hh_l0,h_prev)
print(my_rnn_output.shape)
print(my_state_final.shape)
train.py
import torch
import torch.nn as nn
import numpy as np
#从自己创建的models库里导入RNN模块
#import RNN 仅仅是把RNN.py导入进来,当我们创建RNN的实例的时候需要通过指定RNN.py中的具体类.
#例如:我的RNN.py中的类名是RNN,则后面的模型实例化RNN需要通过**RNN.RNN()**来操作
#还可以通过 from 还可以通过 from RNN import * 直接把RNN.py中除了以 _ 开头的内容都导入
from models.nlp import RNN
from models.nlp.RNN import *
import datetime
import torch.optim as optim
#导入画图的库,后面将主要学习使用axes方法来画图
from matplotlib import pyplot as plt
batch_size=2#批大小
T_seq=30#输入序列长度(时间步)
feature_size=3#输入特征维度
hidden_size=5#隐含层维度
output_size=4#输出层维度
num_layers=1
lr_rate=0.001
epoch=1000
#input 即RNN网络的输入,维度应该为(T_seq, batch_size, input_size)。如果设置batch_first=True,输入维度则为(batch, seq_len, input_size)
input=torch.randn(batch_size,T_seq,feature_size)
def train(input):
model=RNN(feature_size,hidden_size,num_layers,output_size)
print("model:\n",model)
# 设置损失函数
loss_fn=nn.MSELoss()
# 设置优化器
optimizer=optim.Adam(model.parameters(),lr_rate)
# 初始化h_prev,它和输入x本质是一样的,hidden_size就是它的特征维度
#维度应该为(num_layers * num_directions, batch, hidden_size)。num_layers表示堆叠的RNN网络的层数。
# 对于双向RNNs而言num_directions= 2,对于单向RNNs而言,num_directions= 1
hidden_prev=torch.zeros(1,batch_size,hidden_size)
loss_plt=[]
#开始训练
for iter in range(epoch):
x = input
print("x:", x.shape)
output,hidden_prev=model(x,hidden_prev)
print("output_size:",output.shape)
#注意这里的标签,在实际任务的训练中标签往往是下一时刻的数据
y = torch.randn(batch_size,T_seq,output_size)
print("y:", y.shape)
#返回一个新的tensor,从当前计算图中分离下来的,但是仍指向原变量的存放位置,
# 不同之处只是requires_grad为false,得到的这个tensor永远不需要计算其梯度,不具有grad。
hidden_prev=hidden_prev.detach()
loss=loss_fn(output,y)
model.zero_grad()
loss.backward()
optimizer.step()
if iter%100==0:
print("iteration:{} loss {}".format(iter,loss.item()))
loss_plt.append(loss.item())
fig,ax=plt.subplots(1,1)
ax.plot(loss_plt, 'r')
ax.set_xlabel('epcoh')
ax.set_ylabel('loss')
ax.set_title('RNN-train-loss')
return hidden_prev, model
if __name__ == '__main__':
#计算训练时间,结束时间减去开始时间
start_time = datetime.datetime.now()
hidden_pre, model = train(input)
end_time = datetime.datetime.now()
print('The training time: %s' % str(end_time - start_time))
plt.show()
参考资料
8.4. 循环神经网络 — 动手学深度学习 2.0.0 documentation
https://zhuanlan.zhihu.com/p/28054589

技术共进,成长同行——讯飞AI开发者社区
更多推荐


 53
53 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)