
ERROR: Error loading ASGI app. Could not import module “main“.
更改工作目录,在项目所在文件夹下运行。在文件名前面添加项目文件夹名src。
·
解决方法1:
更改工作目录,在项目所在文件夹下运行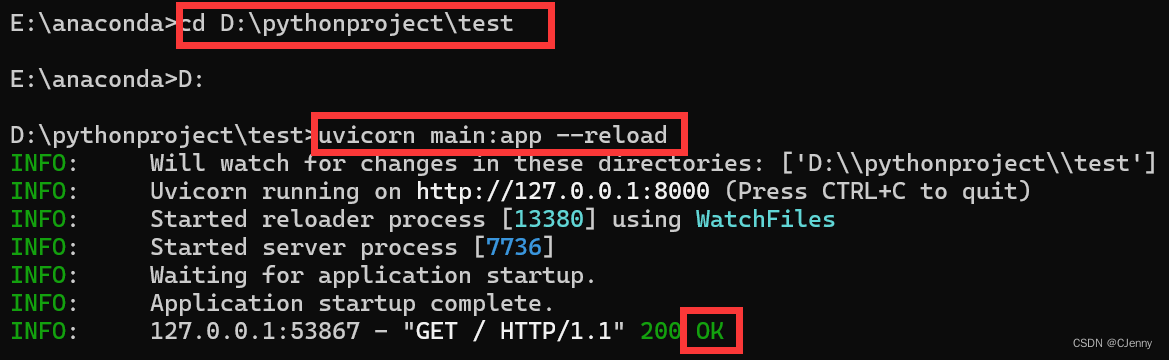
解决方法2:
在文件名前面添加项目文件夹名src
uvicorn src.main:app --reload

技术共进,成长同行——讯飞AI开发者社区
更多推荐
 3
3 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)