
ABB机械人模型下载
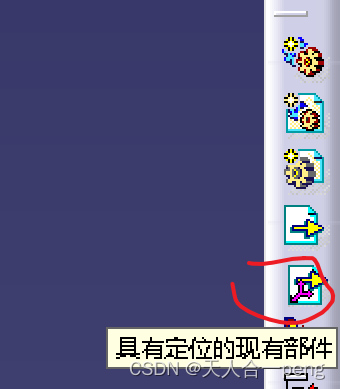
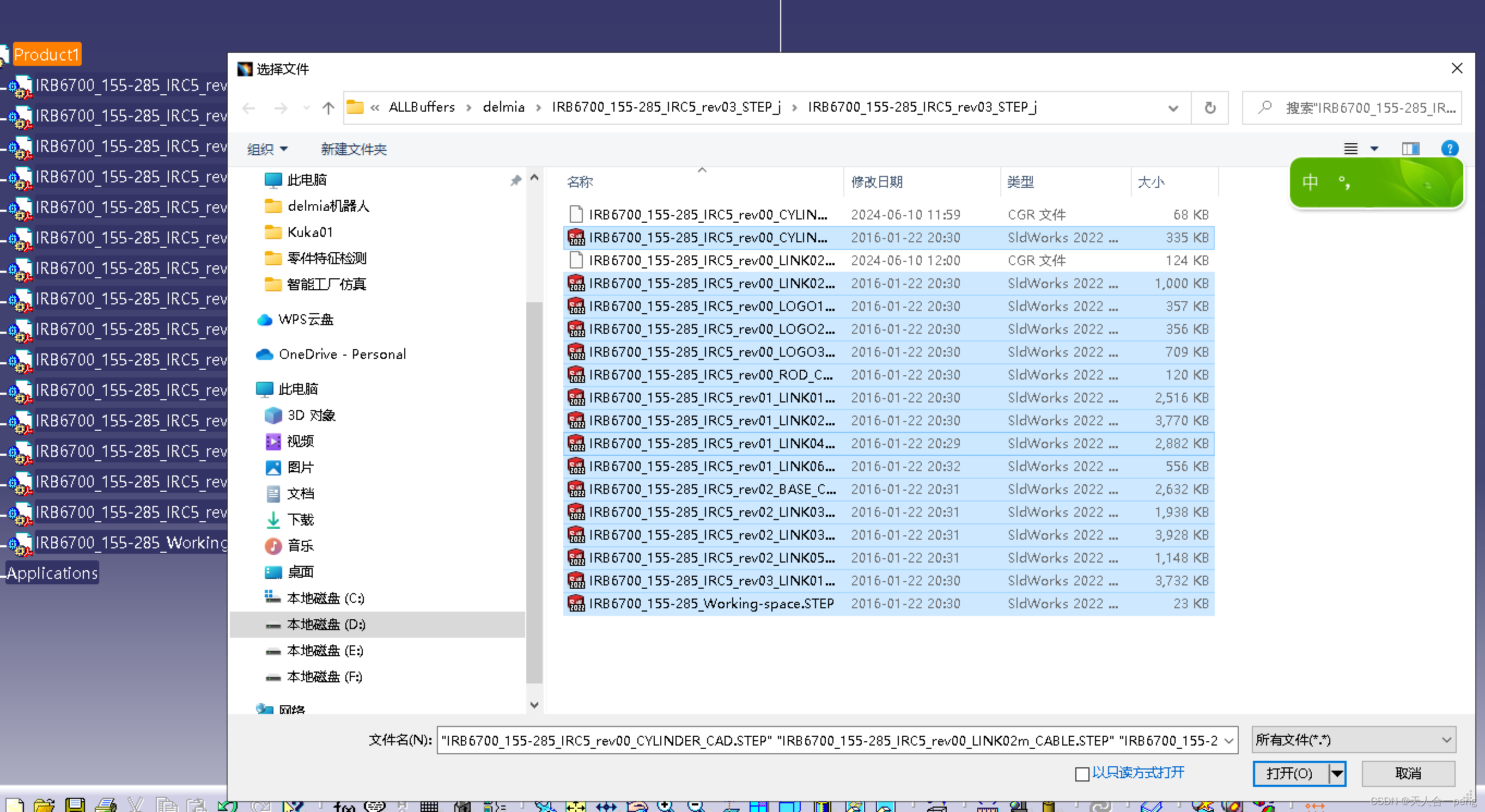
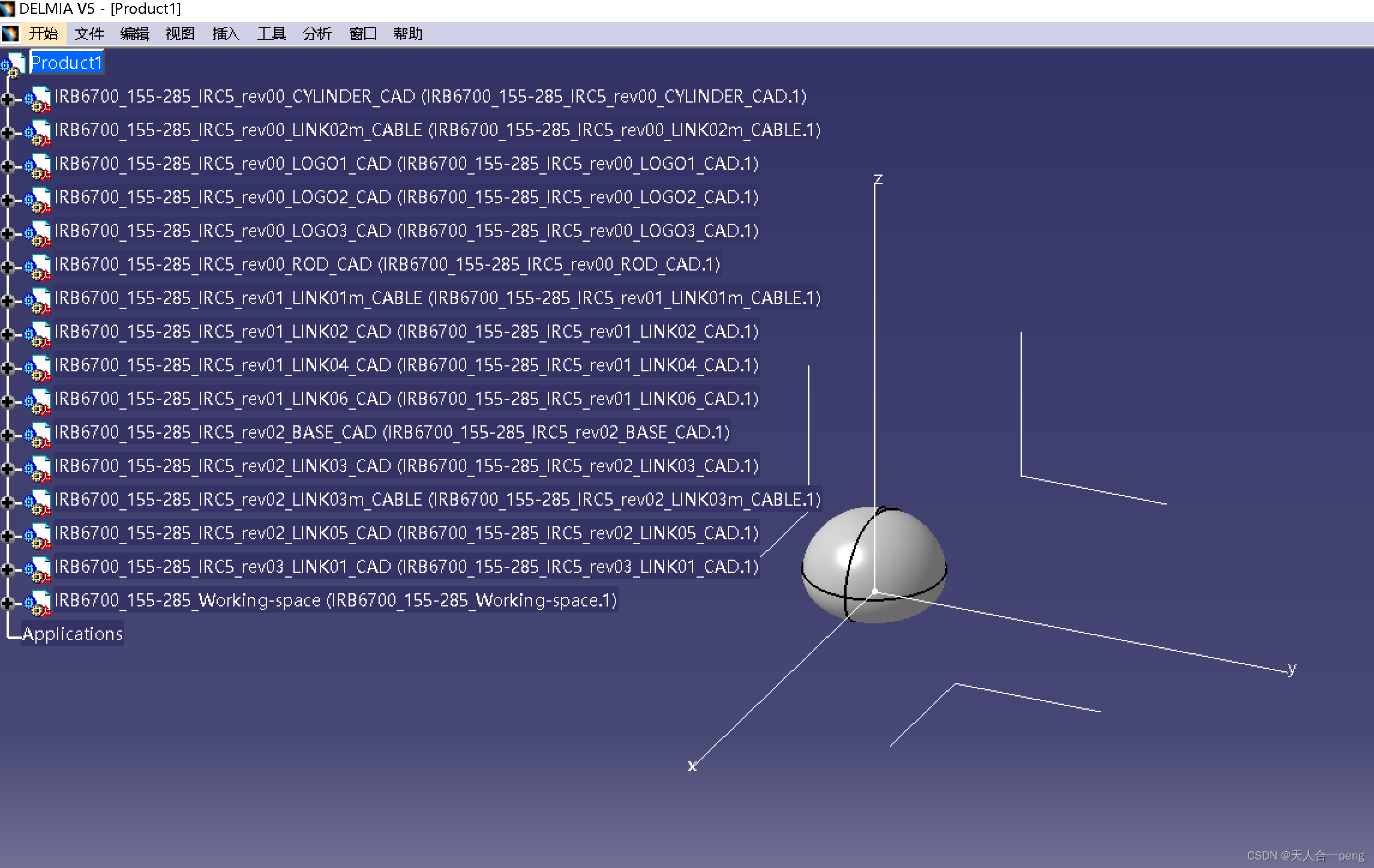
step的打开各部件是分开的,没有装配在一起,打开看单个零件时,我们会发现其各零件是有装配的定位关系的。新建一个装配环境,点出具有定位的零件功能,然后将所有的step文件都全选。
·
可以下载不同格式的
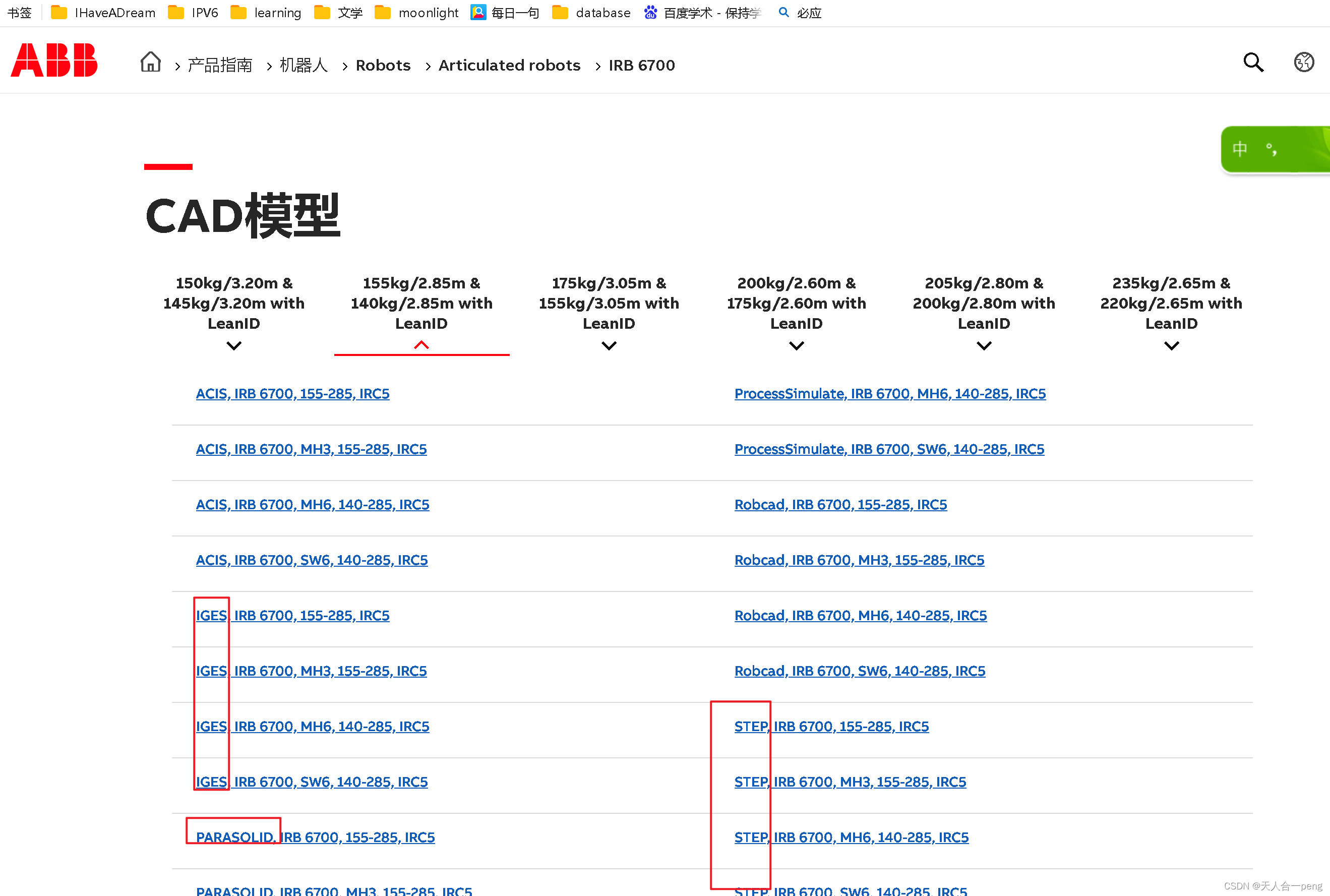
https://new.abb.com/products/robotics/zh/robots/articulated-robots/irb-6700
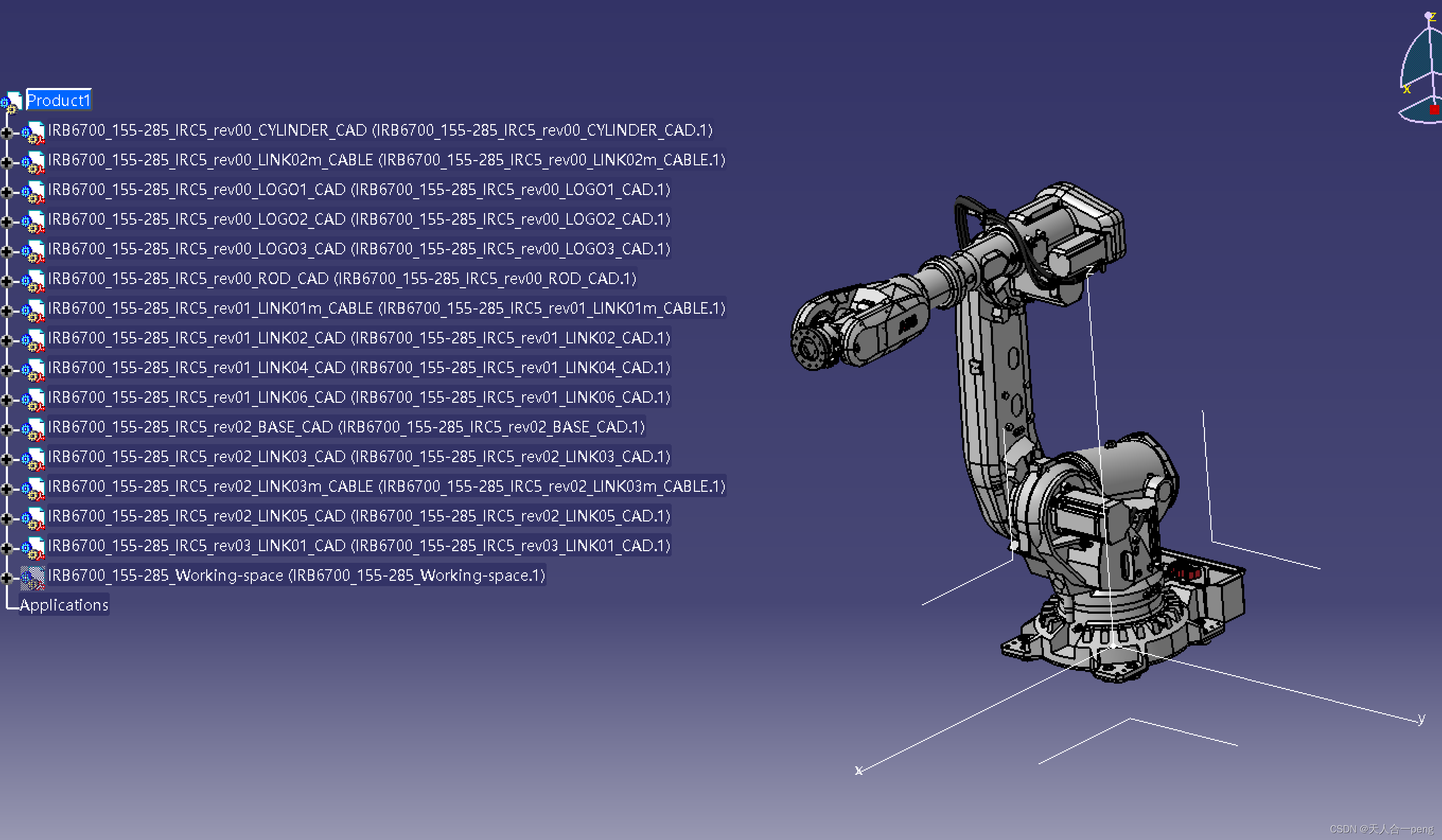
step的打开各部件是分开的,没有装配在一起,打开看单个零件时,我们会发现其各零件是有装配的定位关系的。
新建一个装配环境,点出具有定位的零件功能,
然后将所有的step文件都全选
导入
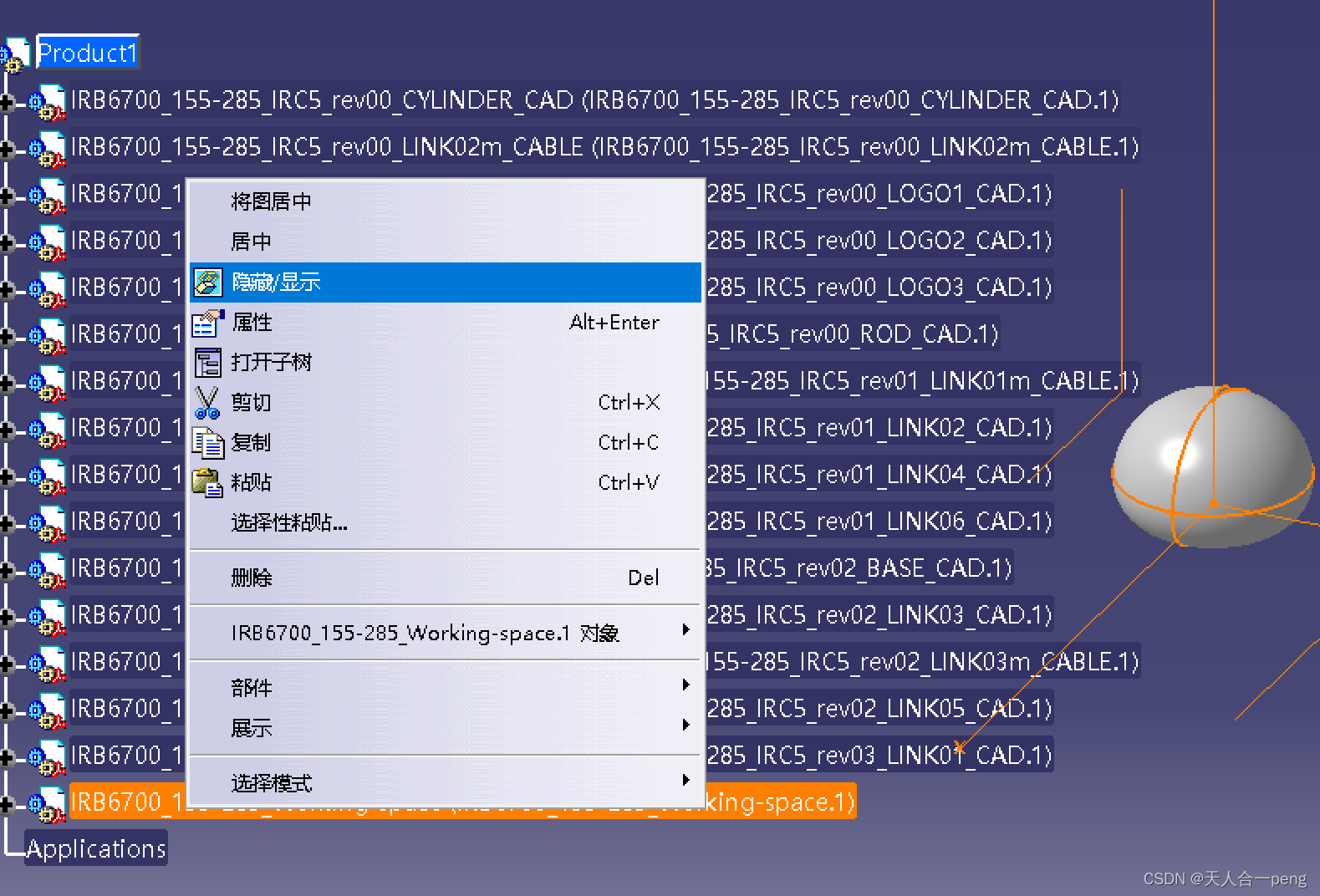
隐藏这个部分

技术共进,成长同行——讯飞AI开发者社区
更多推荐

 3
3 0
0- 0



 已为社区贡献35条内容
已为社区贡献35条内容

所有评论(0)