
自动驾驶中的传感器技术5——概述(5)-USS
超声波雷达(USS)是自动驾驶中关键的短距离感知传感器,主要用于泊车辅助和短距探测。它通过压电晶体发射/接收超声波(40-58kHz)测量物体距离,分为长距APA(0.3-5m)和短距UPA(0.1-2.5m)两种类型。技术特点包括温度补偿、分时测量和抗干扰设计。新一代AK2雷达采用DSI3通信(444kbps),支持多模式发波和ASIL-B功能安全,探测距离超过5m且盲区小于10cm。未来发展方
5 USS技术概述(超声传感器)
在自动驾驶技术中,超声波雷达(Ultrasonic Sensor System,简称USS)是一种关键的短距离感知传感器,广泛应用于车辆的环境感知和辅助驾驶功能中。它通过发射超声波并接收反射信号来测量物体的距离,从而实现对周围环境的实时监测。
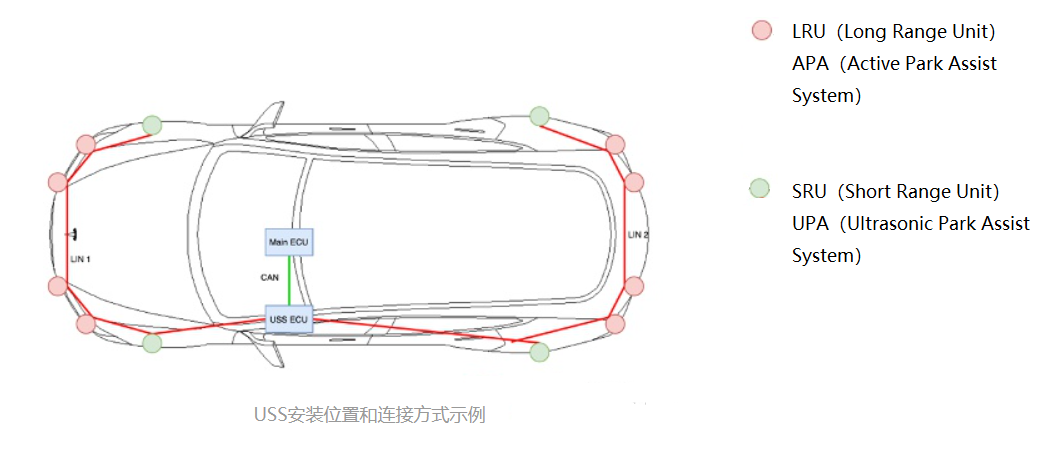
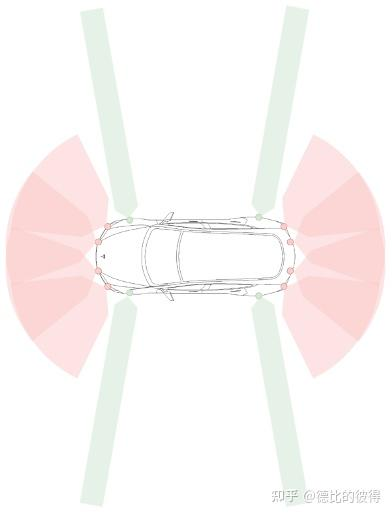
主要分为两类:LRU(Long Range Unit),检测距离通常在30-500cm,也有的能够超过700cm,检测角度较小,通常作为APA(Active Park Assist System)传感器安装在车身侧面;SRU(Short Range Unit),检测距离通常在15-250cm,通常作为UPA(Ultrasonic Park Assist System)传感器安装在前后保险杠。
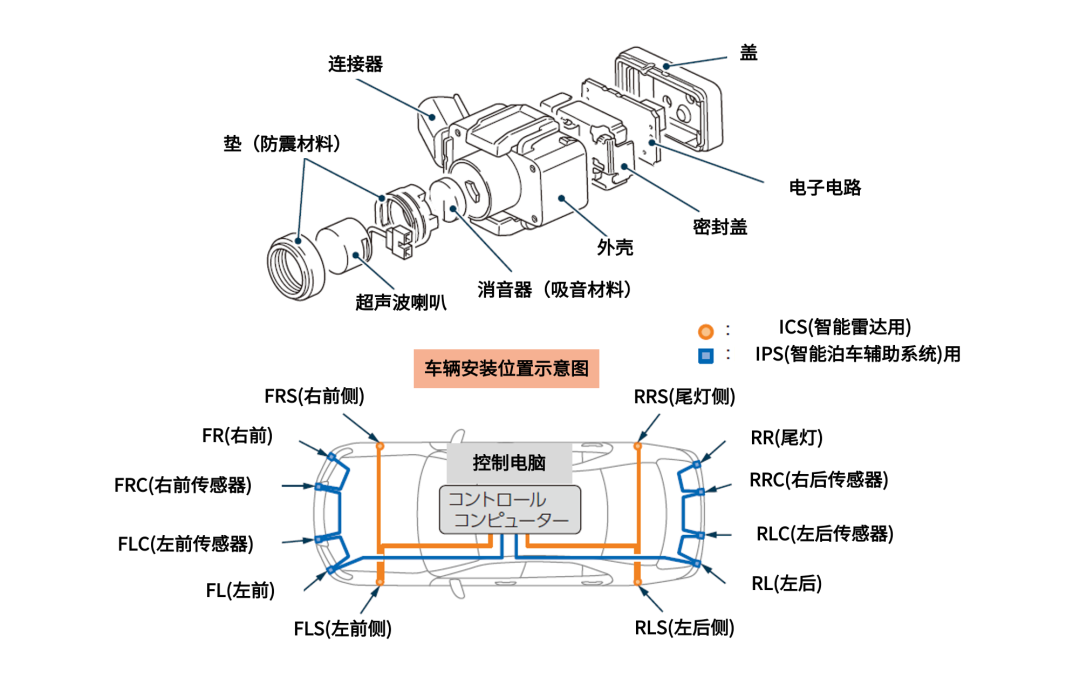
布置位置可以是如下几种:
-
车身侧面:LRU
-
前后保险杠:SRU
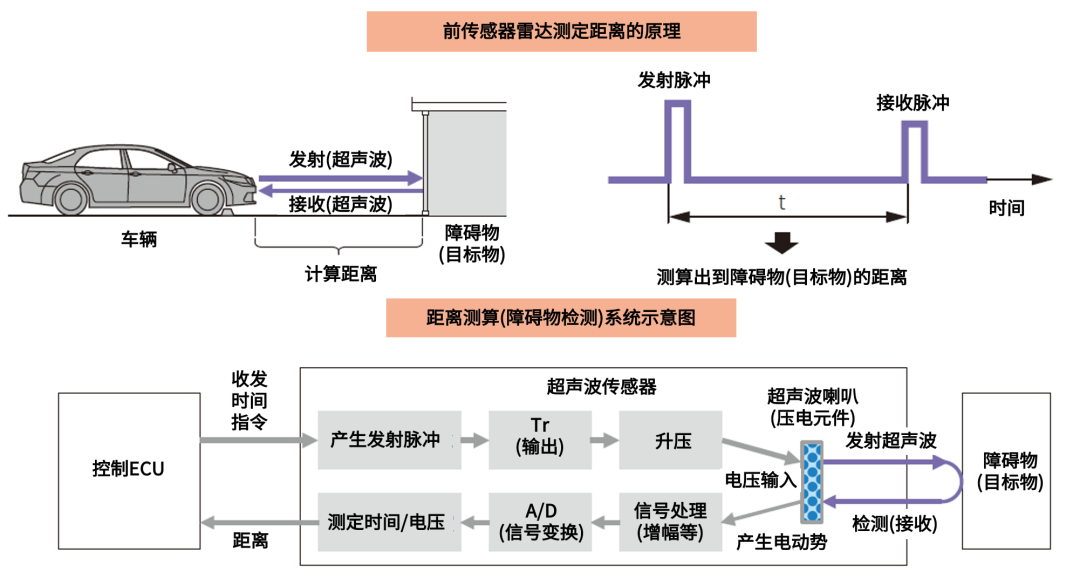
5.1 基本原理
电压加载在压电晶体,引起共振发射高于20kHz的机械波(超声波)。如果没有施加电压时,压电晶体接收到外界特定振动将产生共振,会把机械能转化为电信号,内部电路计算后可获取时间。 工作频率就是压电晶片的共振频率。当加到它两端的交流电压的频率和晶片的共振频率相等时,输出的能量最大,灵敏度也最高;常用探头的工作频率有 40kHz, 48kHz和58kHz三种。一般来说,频率越高,灵敏度越高,但水平与垂直方向的探测角度就越小。
技术参考点:
-
工作频率
-
发射声压级
-
波束角度
-
接收灵敏度
-
感度
-
余振
-
测距盲区
-
工作温度
-
测量精度
-
温度敏感
5.2 技术特点
-
UPA:Ultrasonic Parking Assistant,超声波驻车辅助传感器;探测距离一般在15~250cm 之间,感测距离较短,但是频率较高,为58kHz,精度高;
-
APA:Automatic Parking Assistant,自动泊车辅助传感器;探测距离一般在30~500cm之间,感测距离较长,但是频率较低,为 40kHz,精度一般。
-
超声波的探测距离L一般为0.1m~2.5m(UPA)、0.3m~5m(APA);
-
单个探头的扫描周期一般为50ms(自检、初始化10~20ms,5m探测距离需要30ms,5m*2/340m/s≈30ms);
-
超声波雷达探头的水平探测角度一般为120°(UPA)、80°(APA);
5.3 工程实践
-
温度补偿:探测环境温度,通过软件补偿因温度变化带来的超声波传播速度差异。
-
减小余振:余振时间通常为1.5ms~2ms,需要延时接收,但会形成探测盲区。选型余振时间小的探头。
-
减少地面反射:根据探头的垂直探测角度,改善安装位置,避免产生地面回波。加入软件滤波,如阶梯滤波,识别出地面回波,避免误报警。
-
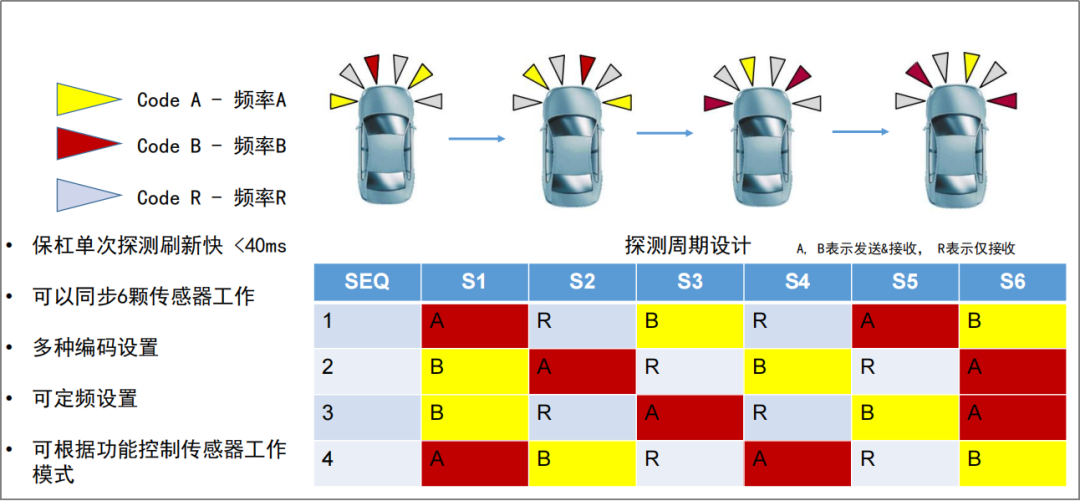
分时测量+方向定位:为防止探头信号互相干扰,探头分时工作。探头单发多收,采用三角定位算法,计算出真实距离。
-
增益控制:设置的放大倍数需兼顾远近距离
-
抗同频干扰:硬件检波+软件滤波
5.4 AK2超声波雷达
-
探测更远(>5m)、盲区更小(10cm以内)
-
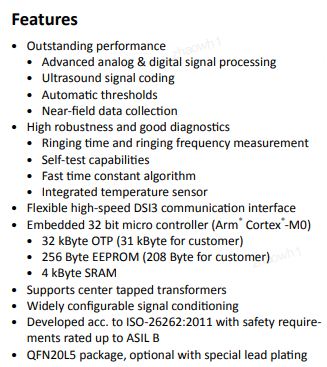
回波更多:采用DSI3通信方式,信号传播速度快,最高速率可达444kbit/s,一个传感器检测周期内最多可支持230个回波
-
抗干扰
-
满足功能安全ASIL-B要求
-
波形编码
-
支持多模式切换(如豪恩汽电的AK2支持三种发波模式:定频模式,上扫频模式和下扫频模式)
-
具备诊断功能(如博世第六代超声波雷达具备硬件失聪检测功能)

AK2优势:
-
如果系统刷新较长,会有什么后果呢?单位时间的点云信息就少了,也就是密度少了,密度少了会有什么后果呢?障碍物包括车位的轮廓就没有那么好了,整体系统精度就会受到影响。
-
线性调频(Chirp模式)下发波强度可以做到最大,提高我们的最远探测距离。
-
新一代的ASIC提取数字信号的能力更强,带宽也更大(老一代超声波一般采用GPIO/LIN,新一代上DSI),所以可以把更多更原始的特征信息提取出来给到上层信号处理中,信号处理中可以采取更多更有意思的算法去做更多的应用。当然,这个对于MCU也是很大的负载,所以各家可以考虑对整个域控架构进行些调整,适当超声算法可以放在SOC端。
5.5 后续超声波雷达的迭代方向
-
AIP封装的近场雷达是否会代替?--由于毫米波雷达的优势,点云的丰富度,测高能力等,未来整车是否由毫米波替代超声波呢?让我们拭目以待
-
可以进行测高的超声波:由于目前超声波雷达只能输出物体的高低属性,无法准确测高,所以下一代超声波也需要把此痛点解决,方案当然由很多,在此不表
-
可以在中高速条件下进行探测的超声波:目前超声波主要运用于低速场景(25kph以下),中高速条件下的超声波稳定探测也是一个未来需要解决的点,很多高速场景也需要超声波进行一定的补盲,比如干线物流卡车侧方盲区

技术共进,成长同行——讯飞AI开发者社区
更多推荐

 7
7 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)