
【单片机毕业设计】【mcuclub-dz-134】基于单片机语音消毒分类打包智能环保垃圾桶设计
本文介绍了一种基于STM32F103C8T6单片机的智能垃圾桶设计。该垃圾桶具备多种功能,包括语音识别、手动开启、重量检测、装满检测、打包模拟、蜂鸣器预警以及紫外线消毒等。通过语音识别模块,垃圾桶能够识别不同种类的垃圾,并自动打开对应的垃圾桶。同时,用户还可以通过按键手动打开特定垃圾桶。重量检测是本设计的核心功能,采用薄片式压力传感器配合分离式红外对射管,能够准确测量垃圾桶内的重量。当垃圾桶重量达
最近设计了一个项目基于单片机语音消毒分类打包智能环保垃圾桶设计,与大家分享一下:
一、基本介绍
项目名:垃圾桶(实物)
项目编号:mcuclub-dz-134
单片机类型:STM32F103C8T6
具体功能:
1、通过语音识别模块可识别出不同种类的垃圾,并能自动打开对应的垃圾桶 (可回收垃圾、其它垃圾)
2、通过按键可手动打开对应的垃圾桶
3、通过薄片式压力传感器测量垃圾桶内重量,配合分离式红外对射管,判断垃圾桶是否已满,任意一个条件满足会认定已满,最大重量值可通过按键设置
4、垃圾桶装满后做出相应打包(继电器模拟),以及蜂鸣器预警,提示工作人员丢垃圾,当垃圾桶装满时只能靠按键打开,清理完成后,正常运行
5、通过定时间隔多长时间利用紫外线进行消毒杀菌
6、通过OLED显示各测量数据
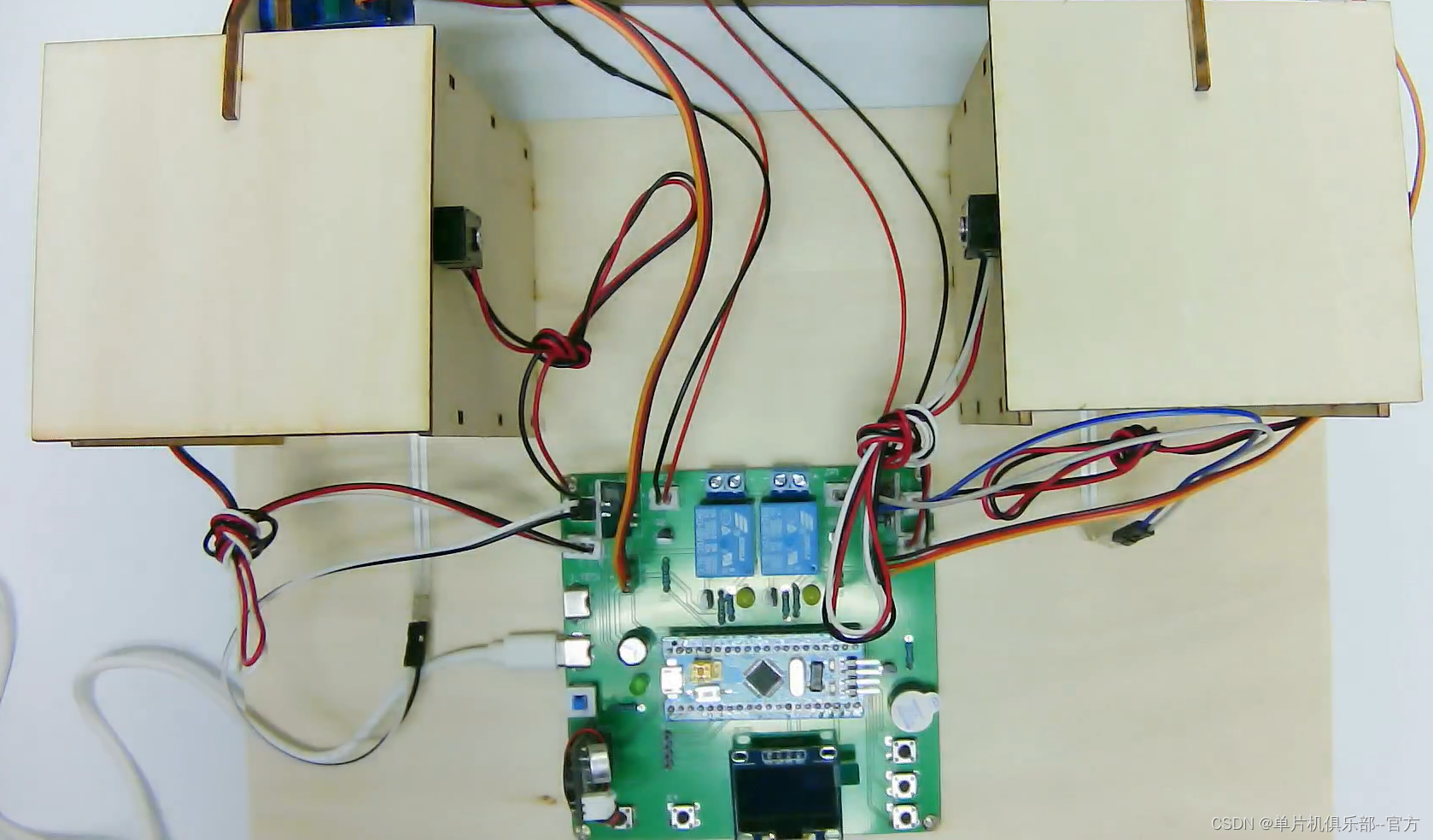
二、51实物图
单片机型号:STC89C52
板子为绿色PCB板,两层板,厚度1.2,上下覆铜接地。元器件基本上为插针式,个别降压芯片会使用贴片式。
供电接口:TYPE-C
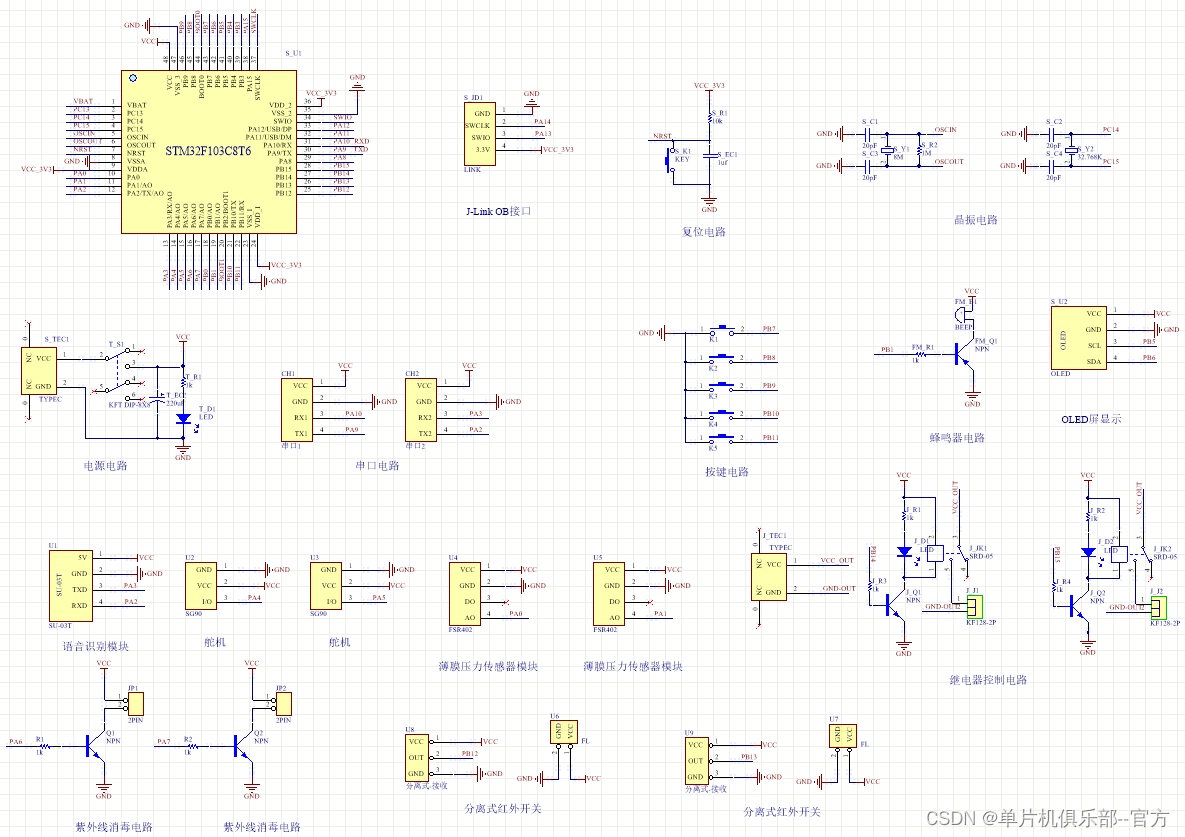
三、原理图
软件版本:AD2013
电路连线方式:网络标号连线方式
注意:原理图只是画出了模块的引脚图,而并不是模块的内部结构原理图
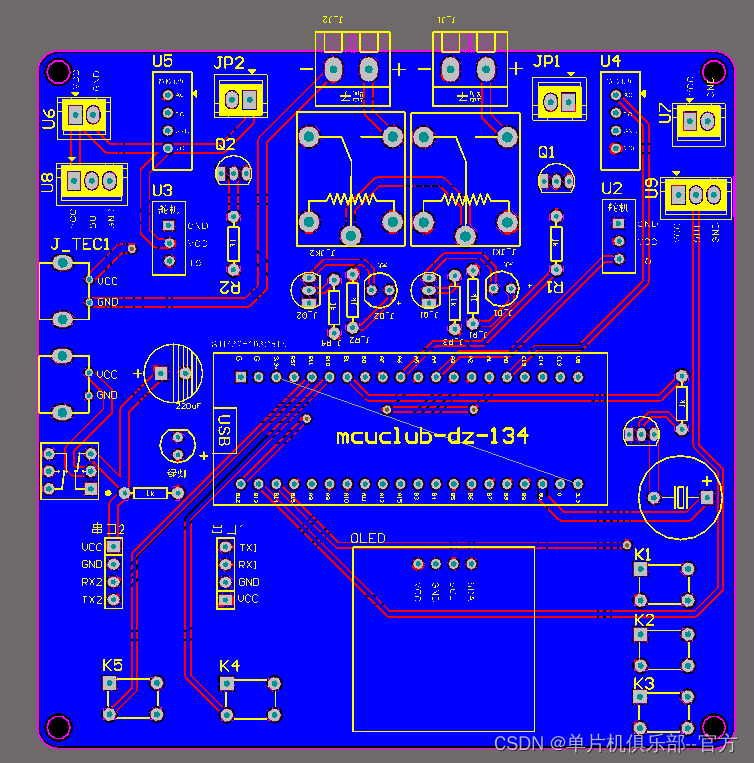
四、PCB图
由原理图导出,封装很大一部分都是作者自己绘制,不提供封装库,只提供连接好的源文件。中间有一个项目编号,隐藏在单片机底座下,插入单片机后不会看到。
两层板,上下覆铜接地。
五、系统框图
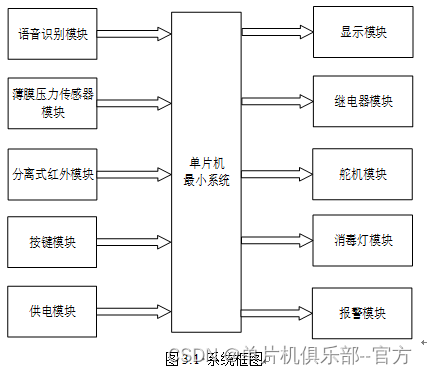
本设计以单片机为核心控制器,加上其他模块一起组成此次设计垃圾桶的整个系统,其中包括中控部分、输入部分和输出部分。中控部分采用了单片机控制器,其主要作用是获取输入部分的数据,经过内部处理,逻辑判断,最终控制输出部分。输入由五部分组成,第一部分是语音识别模块,通过该模块控制不同的垃圾桶的开关;第二部分是薄膜式压力传感器,通过该模块监测当前垃圾的重量;第三部分是分离式红外模块,通过该模块监测垃圾桶垃圾是否满;第四部分是按键模块,通过该模块可以控制垃圾桶的开关等;第五部分是供电模块,通过该模块可给整个系统进行供电。输出由五部分组成,第一部分是显示模块,通过该模块可以显示监测的数据;第二部分是继电器模块,通过两个继电器分别控制垃圾桶打包;第三部分是舵机模块,两个舵机控制垃圾桶盖的打开或者关闭;;第四部分是消毒灯模块,可以定时对垃圾桶内垃圾进行消毒;第五部分是报警模块,垃圾打包完成进行蜂鸣器提醒,具体系统框图如图3.1所示。
六、软件设计流程
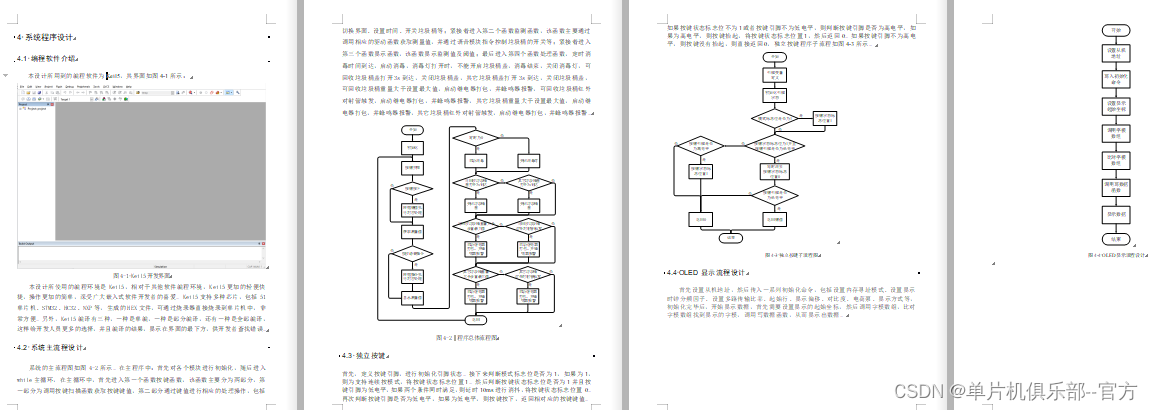
七、部分程序展示
软件版本:keil5
逻辑程序和驱动程序分开,分布于main.c和其他.c文件
*******处理函数
*****/
void Manage_function(void)
{
if(flag_display == 0) //测量界面
{
if(countdown_hour != 0 || countdown_minute != 0 || countdown_second != 0) //设置时间不为0
flag_timer_begin_1s = 1; //打开定时器,倒计时开始if(flag_1s == 1) //1s到达
{
flag_1s = 0;
if(countdown_second > 0)
countdown_second--;
else
{
if(countdown_minute > 0)
{
countdown_minute--;
countdown_second = 59;
}
else
{
if(countdown_hour > 0)
{
countdown_hour--;
countdown_minute = 59;
countdown_second = 59;
}
else
{
flag_countdown_begin = 0;
flag_countdown_end = 1;
}
}
}
}
if(flag_countdown_end == 1) //倒计时结束,启动消毒
{
flag_xd = 1;
flag_countdown_end = 0;
flag_timer_begin_1s = 0;
countdown_hour = countdown_hour_old;
countdown_minute = countdown_minute_old;
countdown_second = countdown_second_old;
}
if(flag_xd == 1) //消毒灯打开时,不能开启垃圾桶盖
{
if(servo_khs == 5 && servo_qt == 5)
{
LED1_XD = 1;
LED2_XD = 1;
flag_timer_begin_3s = 1;
}
else
{
LED1_XD = 0;
LED2_XD = 0;
flag_timer_begin_3s = 0;
}
}
if(flag_3s == 1) //消毒结束,关闭消毒灯
{
LED1_XD = 0;
LED2_XD = 0;
flag_xd = 0;
flag_timer_begin_3s = 0;
}
if(flag_3s_khs == 1) //可回收垃圾桶盖打开3s到达,关闭垃圾桶盖
{
servo_khs = 5;
flag_timer_begin_3s_khs = 0;
}
if(flag_3s_qt == 1) //其它垃圾桶盖打开3s到达,关闭垃圾桶盖
{
servo_qt = 5;
flag_timer_begin_3s_qt = 0;
}
if(weight_khs > weight_khs_max) //可回收垃圾桶重量大于设置最大值,启动继电器打包,并蜂鸣器报警
{
if(flag_khs == 0)
{
RELAY_2 = 1;
Delay_ms(1000);
RELAY_2 = 0;
BEEP = 1;
Delay_ms(1000);
Delay_ms(1000);
BEEP = 0;
flag_khs = 1;
}
}
else if(IR_1 == 1) //可回收垃圾桶红外对射管触发,启动继电器打包,并蜂鸣器报警
{
Delay_ms(1000);
if(IR_1 == 1)
{
if(flag_khs == 0)
{
RELAY_2 = 1;
Delay_ms(1000);
RELAY_2 = 0;
BEEP = 1;
Delay_ms(1000);
Delay_ms(1000);
BEEP = 0;
flag_khs = 1;
}
}
}
else
{
flag_khs = 0;
}
if(weight_qt > weight_qt_max) //其它垃圾桶重量大于设置最大值,启动继电器打包,并蜂鸣器报警
{
if(flag_qt == 0)
{
RELAY_1 = 1;
Delay_ms(1000);
RELAY_1 = 0;
BEEP = 1;
Delay_ms(1000);
Delay_ms(1000);
BEEP = 0;
flag_qt = 1;
}
}
else if(IR_2 == 1) //其它垃圾桶红外对射管触发,启动继电器打包,并蜂鸣器报警
{
Delay_ms(1000);
if(IR_2 == 1)
{
if(flag_qt == 0)
{
RELAY_1 = 1;
Delay_ms(1000);
RELAY_1 = 0;
BEEP = 1;
Delay_ms(1000);
Delay_ms(1000);
BEEP = 0;
flag_qt = 1;
}
}
}
else
{
flag_qt = 0;
}
}
else //设置界面
{
}
}

技术共进,成长同行——讯飞AI开发者社区
更多推荐

 0
0 0
0- 0



 已为社区贡献30条内容
已为社区贡献30条内容

所有评论(0)