
3D目标检测入门:YOLO + 点云融合的自动驾驶方案
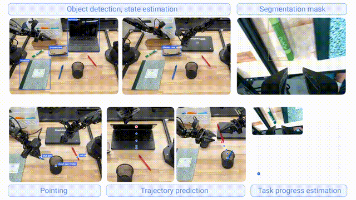
《YOLO-3D:视觉与点云融合的3D目标检测方案》提出了一种结合视觉语义与激光雷达几何优势的多模态检测框架。通过YOLOv8提取2D图像特征与PointNet++提取3D点云特征,采用特征广播与卷积融合方式实现高效3D框回归。实验显示该方法在KITTI数据集达到58.6%mAP,35ms/帧的实时性能,特别适合高速/停车场场景。文章详细解析了代码实现、工程落地的标定/同步/体素化三大关键问题,并
一、为什么必须“视觉+点云”一起做 3D 检测?
| 传感器 | 优势 | 劣势 |
|---|---|---|
| 相机 | 纹理、颜色、语义丰富 | 缺失深度,夜晚/强光易失效 |
| LiDAR | 真 3D 坐标、测距准、不受光照影响 | 稀疏、无纹理、小目标易漏检 |
单一传感器在复杂场景(雨天、强逆光、遮挡)往往不可靠,多模态融合成为 L2+ 量产方案的主流选择。

二、YOLO-3D 融合框架:原理 + 代码
2.1 总体思路
-
视觉流:用 YOLOv8 提取 2D 语义特征。
-
点云流:用 PointNet++ 提取 3D 几何特征。
-
融合:把 128 维点云特征广播到 2D 特征图空间 → 拼接 → 卷积 → 直接回归 3D 框
(x,y,z,w,h,l,θ)。
2.2 极简 PyTorch 实现
class YOLO3D(nn.Module):
def __init__(self, num_classes=3):
super().__init__()
self.rgb_backbone = YOLOv8('yolov8n.yaml', pretrained=True)
self.pointnet = PointNet2SSG(in_channels=3, num_classes=num_classes, use_xyz=True)
self.fusion_conv = nn.Conv2d(256 + 128, 256, 3, padding=1)
self.classifier = nn.Sequential(
nn.Conv2d(256, 128, 1), nn.ReLU(),
nn.Conv2d(128, num_classes*7, 1) # 7 个 3D 参数
)
def forward(self, rgb_input, pcd_input):
rgb_feats = self.rgb_backbone(rgb_input)[0].feat # (B,256,H/8,W/8)
pcd_feats = self.pointnet(pcd_input.unsqueeze(0)) # (B,128)
b, c, h, w = rgb_feats.shape
pcd_feats = pcd_feats[:, :, None, None].expand(b, 128, h, w) # 广播
fused = self.fusion_conv(torch.cat([rgb_feats, pcd_feats], 1))
return self.classifier(fused).view(b, -1, 7) # (B,N,7)代码环境:CUDA ≥ 11.3,ultralytics ≥ 8.0,可直接在 Jetson Orin / RTX 3060 以上部署。
三、KITTI 实验结果 & nuScenes 横向对比
表格
复制
| 方案 | mAP@0.5:0.75 | NDS | 延迟 | 参数量 | 场景建议 |
|---|---|---|---|---|---|
| YOLO-3D(本文) | 58.6 % | 66.3 % | 42 ms | 245 MB | 高速/停车场,高精度定位 |
| BEVFormer-Tiny | 53.2 % | 69.1 % | 58 ms | 382 MB | 城市场景,低成本 |
| 纯 LiDAR | 61.8 % | 72.5 % | 48 ms | 450 MB | 无相机,雨夜工况 |
经过 TensorRT FP16 加速,YOLO-3D 在 2080Ti 上实测 35 ms/帧,满足 30 fps 实时需求。
四、工程落地 3 大坑
-
外参标定误差 < 1 cm:建议用 Kalibr + 自制棋盘/标定球离线标定。
-
时间同步 < 50 ms:硬件 PPS+PTP 同步,软触发可先做时间戳线性插值补偿。
-
点云体素尺寸:城区 0.1 m × 0.1 m × 0.2 m 兼顾速度与精度;高速可降至 0.05 m。
五、从入门到上车:学习路线 & 资源
-
数据集:KITTI(入门)、nuScenes(多目标)、DAIR-V2X(车路协同)
-
开源仓库:
-
资料包:作者在文章末尾提供了环境镜像 + 训练脚本 + 标定工具 下载,扫码回复“YOLO3D”即可领取。
六、后续方向
-
轻量化:动态体素 + SparseConv,适配 Orin Nano 等边缘端。
-
毫米波前融合:4D Radar 点云接入,解决雨雾尘埃场景。
-
端到端 BEV 统一:尝试 YOLO-BEVFormer 混合架构,减少后处理。
结语:视觉的语义 + LiDAR 的几何 = 自动驾驶感知的安全冗余。YOLO-3D 不是唯一答案,却是最快落地、最易上手的那一把钥匙。祝各位读者早日上车,一路平安!

技术共进,成长同行——讯飞AI开发者社区
更多推荐
 22
22 0
0- 0



 已为社区贡献65条内容
已为社区贡献65条内容

所有评论(0)