
用python写一个ROS程序,让小乌龟以0.5m/s的速度沿着边长为5的正方形运行
ROS
程序如下:
#!/usr/bin/env python
import rospy
from geometry_msgs.msg import Twist
import math
if __name__ == '__main__':
try:
# 初始化ROS节点
rospy.init_node('turtle_square_movement', anonymous=True)
# 创建发布者,发布速度指令
velocity_pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)
# 定义线速度
linear_speed = 0.5
# 定义正方形边长
side_length = 5
# 计算移动所需时间
move_time = side_length / linear_speed
# 定义旋转角度(90度,转换为弧度)
rotate_angle = math.pi / 2
# 定义旋转角速度
angular_speed = 1.0
# 计算旋转所需时间
rotate_time = rotate_angle / angular_speed
# 循环四次,完成正方形的四条边
for _ in range(4):
# 创建速度消息对象
vel_msg = Twist()
# 设置线速度
vel_msg.linear.x = linear_speed
# 记录开始时间
start_time = rospy.Time.now().to_sec()
while (rospy.Time.now().to_sec() - start_time) < move_time:
# 发布速度消息
velocity_pub.publish(vel_msg)
# 停止移动
vel_msg.linear.x = 0
velocity_pub.publish(vel_msg)
# 设置角速度
vel_msg.angular.z = angular_speed
start_time = rospy.Time.now().to_sec()
while (rospy.Time.now().to_sec() - start_time) < rotate_time:
# 发布速度消息
velocity_pub.publish(vel_msg)
# 停止旋转
vel_msg.angular.z = 0
velocity_pub.publish(vel_msg)
# 最终停止乌龟
stop_msg = Twist()
velocity_pub.publish(stop_msg)
except rospy.ROSInterruptException:
pass
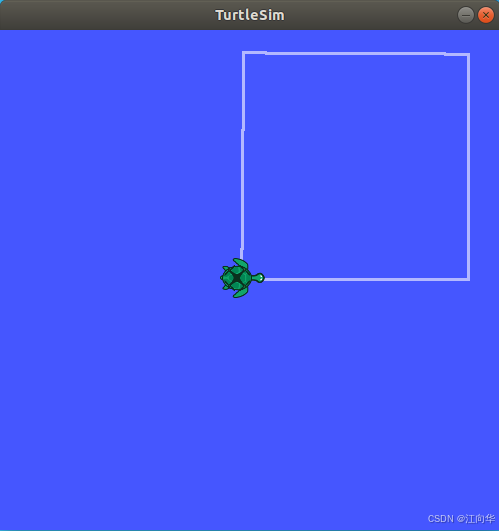
效果如上。

技术共进,成长同行——讯飞AI开发者社区
更多推荐

 44
44 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)