
机器学习(单变量线性回归)
随着人工智能的不断发展,机器学习这门技术也越来越重要,很多人都开启了学习机器学习,本文就介绍了机器学习的基础内容。
提示:可以结合西瓜书等资源进行观看理解
前言
随着人工智能的不断发展,机器学习这门技术也越来越重要,很多人都开启了学习机器学习,本文就介绍了机器学习的基础内容。
一、理论部分
章节一:初识人工智能
E experience
P performance
T task
目的是为了提高在T上的P,经过E之后P会得到提高。
学习算法:
最主要的两类:监督学习(supervised learning)、无监督学习(unsupervised learning)
监督学习:
我们给算法一个数据集,其中包含了正确的答案,算法的目的是给出更多的正确答案。
回归问题:回归即我们设法预测连续值的属性(个人理解:数据拟合)
分类问题:预测一个离散值的属性
无监督学习:
没有任何标签或都具有相同的标签,给你大量的数据,要求找出数据中的数据结构
聚类算法:簇(cluster)
鸡尾酒算法:可以将叠加的声音拆开
【W,s,v】=svd((repment(sum(x.*x,1),size(x,1),1).*x)*x’);
Octave软件
章节二:单变量线性回归
线性模型
符号:
m:训练样本的数量
X:代表输入变量
Y:代表输出变量
(x,y)表示一个训练样本
带上上标表示特定的一条训练样本
模型训练流程: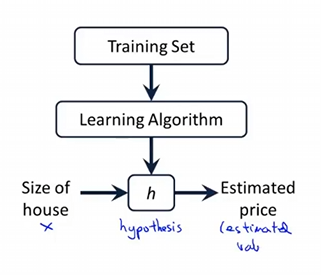
线性回归模型
单变量线性回归
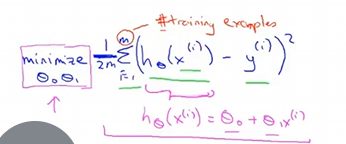
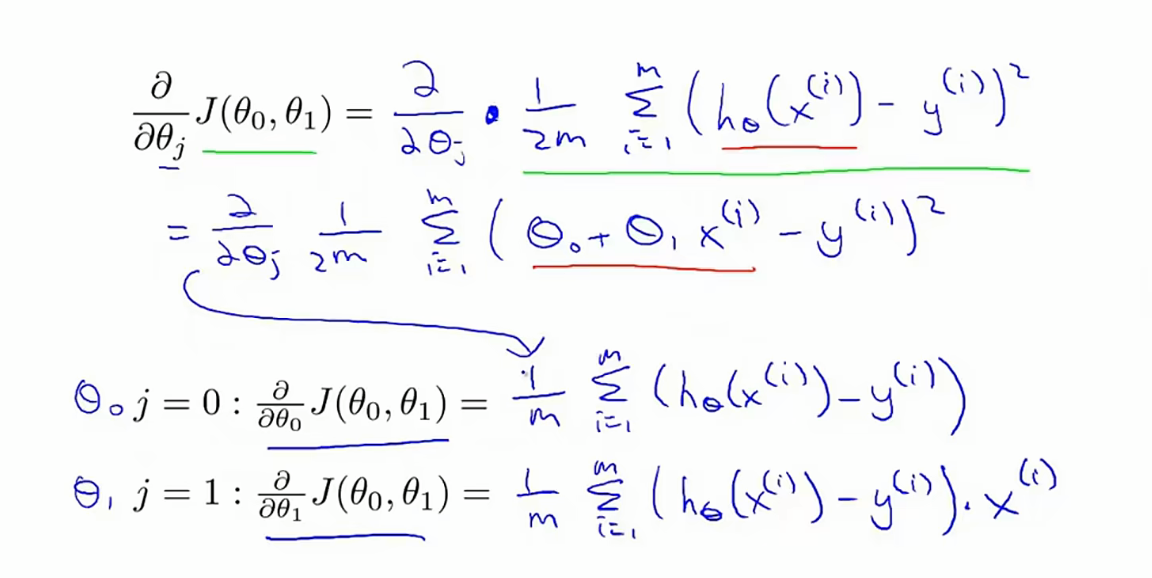
我们想要线性拟合出一个函数,需要求其中的参数,为了求其中的参数,我们提出了cost function,也就是代价函数
代价函数:
最小化问题:尽量减少假设的输出与房子的真实价格的差值的平方
线性回归的整体目标函数(代价函数,平方误差函数):

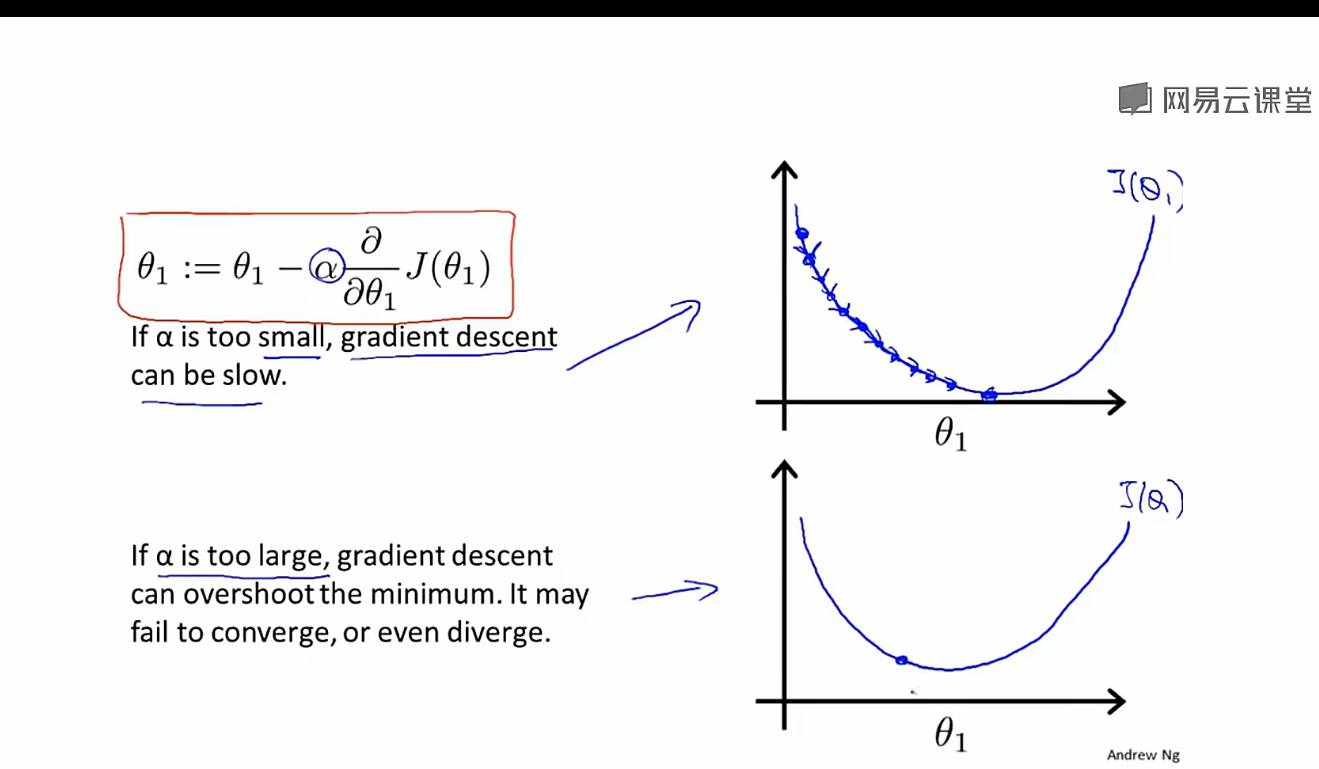
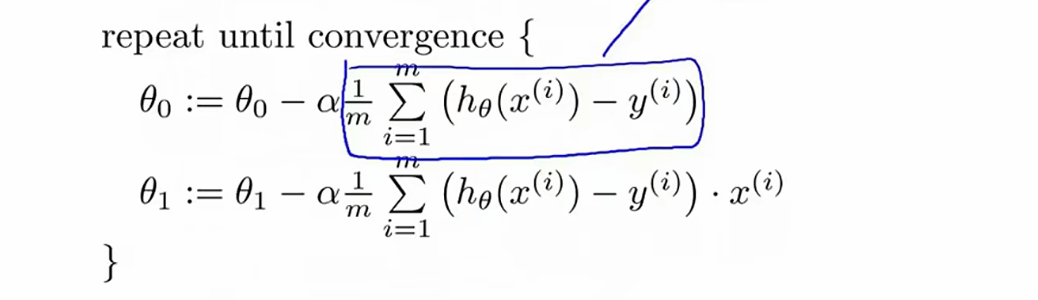
梯度下降算法:
A:=b 赋值运算
学习率:用来控制步子迈多大
学习率太小会导致的情况:
梯度下降的速率太慢了
学习率太大会导致的情况:
会导致无法收敛甚至发散
为什么参数要实现同步更新?
参数必须同步更新的根本原因是,为了确保梯度下降是在当前点的“真实梯度”方向上进行搜索和移动。
直白一点的说法就是:对于一个固定的参数,另一个参数会找到最小的损失函数,但是并不是两个整体最小的,虽然我在这个点的这个参数是最小的,但并不是所有的参数的损失函数最小的。
线性回归算法
将算出的结果带回到梯度下降算法中得到
对于线性回归函数来说没有局部最优解,只有全局最优解
正规方程组解法,但梯度下降更适用于大数据
二、代码实操
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
# 从文件读取数据
def load_data(filename):
data = np.loadtxt(filename)
x = data[:, 0] # 第一列作为x
y = data[:, 1] # 第二列作为y
return x, y
# 计算误差均方函数 J(w,b)
def cost_function(x, y, w, b):
m = x.shape[0] # 训练集的数据样本数
cost_sum = 0.0
for i in range(m):
f_wb = w * x[i] + b
cost = (f_wb - y[i]) ** 2
cost_sum += cost
return cost_sum / (2 * m)
# 计算梯度值 dJ/dw, dJ/db
def compute_gradient(x, y, w, b):
m = x.shape[0] # 训练集的数据样本数
d_w = 0.0
d_b = 0.0
for i in range(m):
f_wb = w * x[i] + b
d_wi = (f_wb - y[i]) * x[i]
d_bi = (f_wb - y[i])
d_w += d_wi
d_b += d_bi
dj_dw = d_w / m
dj_db = d_b / m
return dj_dw, dj_db
# 梯度下降算法
def linear_regression(x, y, w, b, learning_rate=0.01, epochs=1000):
J_history = [] # 记录每次迭代产生的误差值
for epoch in range(epochs):
dj_dw, dj_db = compute_gradient(x, y, w, b)
# w 和 b 需同步更新
w = w - learning_rate * dj_dw
b = b - learning_rate * dj_db
J_history.append(cost_function(x, y, w, b)) # 记录每次迭代产生的误差值
return w, b, J_history
# 绘制线性方程的图像
def draw_line(w, b, xmin, xmax, title):
x = np.linspace(xmin, xmax, 100)
y_pred = w * x + b
plt.xlabel("X-axis", size=15)
plt.ylabel("Y-axis", size=15)
plt.title(title, size=20)
plt.plot(x, y_pred, 'r-', linewidth=2)
# 绘制散点图
def draw_scatter(x, y, title):
plt.xlabel("X-axis", size=15)
plt.ylabel("Y-axis", size=15)
plt.title(title, size=20)
plt.scatter(x, y, c='blue', alpha=0.7)
# 绘制3D代价函数曲面图
def plot_3d_cost_surface(x_data, y_data, w_range=(-10, 10), b_range=(-10, 10)):
# 创建网格
w_values = np.linspace(w_range[0], w_range[1], 100)
b_values = np.linspace(b_range[0], b_range[1], 100)
W, B = np.meshgrid(w_values, b_values)
# 计算每个(w,b)组合的代价
J = np.zeros_like(W)
for i in range(W.shape[0]):
for j in range(W.shape[1]):
J[i, j] = cost_function(x_data, y_data, W[i, j], B[i, j])
# 创建3D图
fig = plt.figure(figsize=(12, 8))
ax = fig.add_subplot(111, projection='3d')
# 绘制曲面
surf = ax.plot_surface(W, B, J, cmap='viridis', alpha=0.8)
# alpha透明度设置
ax.set_xlabel('Weight (w)', fontsize=12)
ax.set_ylabel('Bias (b)', fontsize=12)
ax.set_zlabel('Cost J(w,b)', fontsize=12)
ax.set_title('3D Cost Function Surface', fontsize=16)
# 添加颜色条
fig.colorbar(surf, ax=ax, shrink=0.5, aspect=20)
return fig, ax
# 绘制等高线图
def plot_contour(x_data, y_data, w_range=(-10, 10), b_range=(-10, 10)):
# 创建网格
w_values = np.linspace(w_range[0], w_range[1], 100)
b_values = np.linspace(b_range[0], b_range[1], 100)
W, B = np.meshgrid(w_values, b_values)
# 计算每个(w,b)组合的代价
J = np.zeros_like(W)
for i in range(W.shape[0]):
for j in range(W.shape[1]):
J[i, j] = cost_function(x_data, y_data, W[i, j], B[i, j])
# 创建等高线图
plt.figure(figsize=(10, 8))
# 绘制等高线
contour = plt.contour(W, B, J, 50, cmap='viridis')
plt.clabel(contour, inline=True, fontsize=8)
plt.xlabel('Weight (w)', fontsize=12)
plt.ylabel('Bias (b)', fontsize=12)
plt.title('Cost Function Contour Plot', fontsize=16)
plt.colorbar(contour, label='Cost J(w,b)')
return plt.gcf()
# 从这里开始执行
if __name__ == '__main__':
# 从文件读取数据
x_train, y_train = load_data('one_variable.txt')
print(f"成功加载数据: {len(x_train)} 个样本")
print(f"x数据范围: {x_train.min():.2f} - {x_train.max():.2f}")
print(f"y数据范围: {y_train.min():.2f} - {y_train.max():.2f}")
# 初始化参数
w = 0.0 # 权重
b = 0.0 # 偏置
epochs = 10000 # 迭代次数
learning_rate = 0.01 # 学习率
# 运行梯度下降
w, b, J_history = linear_regression(x_train, y_train, w, b, learning_rate, epochs)
print(f"优化结果: w = {w:.4f}, b = {b:.4f}")
print(f"最终代价: {J_history[-1]:.6f}")
# 绘制迭代计算得到的线性回归方程
plt.figure(1, figsize=(10, 6))
draw_scatter(x_train, y_train, "Training Data with Regression Line")
draw_line(w, b, x_train.min() - 1, x_train.max() + 1, f"Linear Regression: y = {w:.2f}x + {b:.2f}")
plt.grid(True, alpha=0.3)
plt.legend(['Regression Line', 'Training Data'])
plt.show()
# 绘制误差值的收敛曲线
plt.figure(2, figsize=(10, 6))
plt.plot(range(epochs), J_history, 'b-', linewidth=1)
plt.xlabel('Epochs', size=15)
plt.ylabel('Cost', size=15)
plt.title('Cost Function Convergence', size=20)
plt.grid(True, alpha=0.3)
plt.yscale('log') # 使用对数坐标更好地显示收敛
plt.show()
# 绘制3D代价函数曲面图
# 根据数据范围调整显示范围
w_center = w
b_center = b
w_range = (w_center - 5, w_center + 5)
b_range = (b_center - 5, b_center + 5)
plot_3d_cost_surface(x_train, y_train, w_range, b_range)
plt.show()
# 绘制等高线图
plot_contour(x_train, y_train, w_range, b_range)
plt.scatter([w], [b], c='red', s=100, marker='x', label='Optimal Point')
plt.legend()
plt.show()
技术共进,成长同行——讯飞AI开发者社区
更多推荐
 16
16 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)